También podría gustarte
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Actividad 3.4 LM35 y AlarmasDocumento1 páginaActividad 3.4 LM35 y AlarmasEfrain RdzAún no hay calificaciones
- Programa y Circuito de Ohmetro en MicrocodeDocumento4 páginasPrograma y Circuito de Ohmetro en MicrocodeKevin Muyón RiveraAún no hay calificaciones
- Examen Final Upuc 2019 Ii Practico PDFDocumento2 páginasExamen Final Upuc 2019 Ii Practico PDFPol Ardiles Morales0% (2)
- Control de Servomotores en PROTONBASICDocumento13 páginasControl de Servomotores en PROTONBASICJose Luis Rosario SalvadorAún no hay calificaciones
- Frecuencimetro de 0 A 255 HZDocumento3 páginasFrecuencimetro de 0 A 255 HZchuyin barajasAún no hay calificaciones
- Temperatura Con PIC18f4550Documento4 páginasTemperatura Con PIC18f4550yahirdavid3096Aún no hay calificaciones
- Examen Final Microcontroladores 2020aDocumento2 páginasExamen Final Microcontroladores 2020aadolfoAún no hay calificaciones
- Re - 7 - Rodriguez Juarez Jose MartinDocumento13 páginasRe - 7 - Rodriguez Juarez Jose MartinMartin RodríguezAún no hay calificaciones
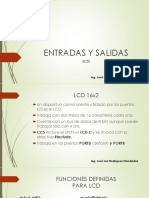
- Entradas y Salidas-LcdDocumento33 páginasEntradas y Salidas-LcdelAún no hay calificaciones
- Inversor Trifasico VHDocumento15 páginasInversor Trifasico VHAdrianMartinezMendezAún no hay calificaciones
- Andreilysurbina L2Documento35 páginasAndreilysurbina L2Andreilys UrbinaAún no hay calificaciones
- Lab 2Documento6 páginasLab 2LEONARDO ZENON VELASQUEZ MEJIAAún no hay calificaciones
- Formato Informe de Laboratorio - Instrumentación 3Documento4 páginasFormato Informe de Laboratorio - Instrumentación 3Valieth SanchezAún no hay calificaciones
- Reporte de Practica 2 de Microcontroladores Unidad 4Documento6 páginasReporte de Practica 2 de Microcontroladores Unidad 4Nabor Alfredo Labias DiazAún no hay calificaciones
- SDDocumento12 páginasSDCarlos EstradaAún no hay calificaciones
- Aplicaciones Avanzadas Con PicDocumento26 páginasAplicaciones Avanzadas Con Piccesar huamanAún no hay calificaciones
- Programación de PIC 16F873A Con Software Flowcode para Leer Una Entrada AnalógicaDocumento3 páginasProgramación de PIC 16F873A Con Software Flowcode para Leer Una Entrada Analógicalerwuis herreraAún no hay calificaciones
- Curso Básico ArduinoDocumento41 páginasCurso Básico ArduinoKriizthiian Addriian Rdz100% (1)
- UntitledDocumento13 páginasUntitledjuan manAún no hay calificaciones
- Potencia InformesDocumento8 páginasPotencia InformesDiego Melendrez NagasakiAún no hay calificaciones
- Preinforme Laboratorio 4 de Electrónica de Potencia 1Documento7 páginasPreinforme Laboratorio 4 de Electrónica de Potencia 1Michael Infantes HuacancaAún no hay calificaciones
- Display LCD en MikrocDocumento6 páginasDisplay LCD en Mikrocfer poloAún no hay calificaciones
- Laboratorio Sisdig S05Documento8 páginasLaboratorio Sisdig S05Aldahir DavilaAún no hay calificaciones
- ContadorDocumento4 páginasContadorJeimss MoraAún no hay calificaciones
- Pic 16F886Documento7 páginasPic 16F886Jarot HackingAún no hay calificaciones
- Contador0 20-435Documento2 páginasContador0 20-435Leo EscobarAún no hay calificaciones
- Informe Practica 3 SDIIDocumento6 páginasInforme Practica 3 SDIIJuan Sebastian Mosquera BarahonaAún no hay calificaciones
- Practica 12Documento6 páginasPractica 12LuchoSangoquizaAún no hay calificaciones
- Power Supply o Fuente de Alimentacion Monitor 17 Mundo VideoDocumento1 páginaPower Supply o Fuente de Alimentacion Monitor 17 Mundo VideoDiego Andres Gutierrez BetancourtAún no hay calificaciones
- Diagrama EsquematicoDocumento1 páginaDiagrama Esquematicorogermantilla08Aún no hay calificaciones
- Informe 6Documento8 páginasInforme 6-Pendexxx- 20Aún no hay calificaciones
- Evaluación Tema 9 TAREA 8%Documento3 páginasEvaluación Tema 9 TAREA 8%José Angel CarrascoAún no hay calificaciones
- PCB ContadorDocumento1 páginaPCB ContadorRicardo CastañedaAún no hay calificaciones
- LABORATORIO 01 Control de PuertosDocumento6 páginasLABORATORIO 01 Control de PuertosOrlando Bustamante FernandezAún no hay calificaciones
- Voltimetro DigitalDocumento8 páginasVoltimetro DigitalJhodiskiLGAún no hay calificaciones
- Practica 4 MicroprocesadoresDocumento7 páginasPractica 4 MicroprocesadoresGodFatherGFAún no hay calificaciones
- Ejemplo 3Documento2 páginasEjemplo 3CARLOS VALDEZAún no hay calificaciones
- Actividad 32 Practica 5 P3Documento8 páginasActividad 32 Practica 5 P3Julio LópezAún no hay calificaciones
- Manejo de LCD 16x2Documento12 páginasManejo de LCD 16x2Diego Segoviano GarciaAún no hay calificaciones
- Clase LuxometroDocumento5 páginasClase LuxometroMarc gutierrAún no hay calificaciones
- Esquematico Estimulador FinDocumento1 páginaEsquematico Estimulador Finandrick britoAún no hay calificaciones
- Evaluación Tema 10 TAREA 8%Documento3 páginasEvaluación Tema 10 TAREA 8%José Angel CarrascoAún no hay calificaciones
- Practica 5Documento8 páginasPractica 5PanchosucuAún no hay calificaciones
- Guia Laboratorio 555 y Flip FlopDocumento4 páginasGuia Laboratorio 555 y Flip FlopXavier PositivoAún no hay calificaciones
- Práctica 2 Semestre Agosto-Dic 2013Documento4 páginasPráctica 2 Semestre Agosto-Dic 2013Cesar SánchezAún no hay calificaciones
- Lab 1 Part 1Documento5 páginasLab 1 Part 1EQUISE AILLON ALDRIN ABNERAún no hay calificaciones
- Contador 0 - 12Documento1 páginaContador 0 - 12Adolfo AguilarAún no hay calificaciones
- Pro Bad or TunerDocumento5 páginasPro Bad or TunerRichard VelasquezAún no hay calificaciones
- BGH Bl3211a Chassis mt8223 Ver.1.1Documento32 páginasBGH Bl3211a Chassis mt8223 Ver.1.1Bhadreshkumar Sharma0% (1)
- Actividad 02-Circuito74ls373Documento2 páginasActividad 02-Circuito74ls373Mane EstrellaAún no hay calificaciones
- ProteusDocumento11 páginasProteusCristian Calin DreghiciuAún no hay calificaciones
- 2o Proyecto Electrónica AplicadaDocumento2 páginas2o Proyecto Electrónica AplicadaJoshs Basto SaénzAún no hay calificaciones
- Diagrama Esquemático de Un Inversor de Voltaje DCDocumento4 páginasDiagrama Esquemático de Un Inversor de Voltaje DCalexis jonathanAún no hay calificaciones
- LAB 2 de Circuitos Electronicos 2 - Fiee UnacDocumento3 páginasLAB 2 de Circuitos Electronicos 2 - Fiee UnacNando NandoAún no hay calificaciones
- Contador00-20 373Documento6 páginasContador00-20 373Leo EscobarAún no hay calificaciones
- Sensor de ColoresDocumento1 páginaSensor de ColoresjulioAún no hay calificaciones
- R2R CompletoDocumento2 páginasR2R CompletomiguelAún no hay calificaciones
- Control de Potencia Con PICDocumento5 páginasControl de Potencia Con PICMiguel Rayme100% (1)
- Prac. # 6 Generacion de Ondas Con Transistor de UnijunturaDocumento2 páginasPrac. # 6 Generacion de Ondas Con Transistor de UnijunturaMaxwell MartinezAún no hay calificaciones
- Enunciado Ejercicio 21-Edificio Murcia - AxonometriaDocumento2 páginasEnunciado Ejercicio 21-Edificio Murcia - AxonometriaDamaris Tenorio CortezAún no hay calificaciones
- Brothwell - Capitulo 4: Medición y Analisis Morfologicos de Los Huesos HumanosDocumento9 páginasBrothwell - Capitulo 4: Medición y Analisis Morfologicos de Los Huesos Humanosmani taboadaAún no hay calificaciones
- Practica de Oferta y Demanda ....Documento10 páginasPractica de Oferta y Demanda ....NeniTha Chang100% (2)
- Primer Examen de Concreto Armado IIDocumento1 páginaPrimer Examen de Concreto Armado IIMilton César Aroní Llantoy100% (1)
- Balance de Materia y Energia Ejercicios IiuDocumento2 páginasBalance de Materia y Energia Ejercicios IiuAndrea Cáceres EspinozaAún no hay calificaciones
- TFG Roca Gonzalez Francisco JavierDocumento183 páginasTFG Roca Gonzalez Francisco JavierEmilio EscalanteAún no hay calificaciones
- Apaza Encalada Solucion de Practica Calificada Por El Docente Lopez Rincon Ademas Hace UnaDocumento157 páginasApaza Encalada Solucion de Practica Calificada Por El Docente Lopez Rincon Ademas Hace UnaManuelAún no hay calificaciones
- Los Materiales y Sus PropiedadesDocumento22 páginasLos Materiales y Sus PropiedadespuertomolAún no hay calificaciones
- L14 Estructuras CondicionalesDocumento4 páginasL14 Estructuras CondicionalesLeslie Gabriela García FernándezAún no hay calificaciones
- Materiales y Herramientas Del BobinadorDocumento34 páginasMateriales y Herramientas Del BobinadorEduardo Enriquez100% (1)
- 3 GUIA La MultiplicacionDocumento11 páginas3 GUIA La MultiplicacionEnrique RosalesAún no hay calificaciones
- DocxDocumento34 páginasDocxgeraldinAún no hay calificaciones
- Fundamentación Teórica Del Test de Matrices Progresivas de RavenDocumento2 páginasFundamentación Teórica Del Test de Matrices Progresivas de RavenJuan Rosado67% (3)
- Guia de Fisica Nivel de Intensidad Del Sonido 2011Documento1 páginaGuia de Fisica Nivel de Intensidad Del Sonido 2011Sebastian BarreraAún no hay calificaciones
- 3.2 Conceptos de Sistema, Energía Interna y Trabajo PDFDocumento28 páginas3.2 Conceptos de Sistema, Energía Interna y Trabajo PDFevelyn OrralaAún no hay calificaciones
- Ser Omni 4Documento8 páginasSer Omni 4roblestolentino100% (2)
- Álgebra de Mapas GeorectificacionDocumento19 páginasÁlgebra de Mapas Georectificacionsofia.chavesAún no hay calificaciones
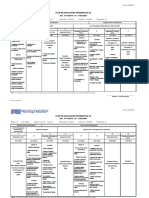
- Plan de Evaluación Informática (2) - IUPSM 2019Documento3 páginasPlan de Evaluación Informática (2) - IUPSM 2019Hari RamírezAún no hay calificaciones
- Teoría Del Color - RosasDocumento10 páginasTeoría Del Color - RosasLiz RosasAún no hay calificaciones
- Distribuciones MuestralesDocumento18 páginasDistribuciones MuestralesCARLOS ALBERTO BRAVO FLOREZAún no hay calificaciones
- Aplicaciones Del 555Documento3 páginasAplicaciones Del 555lopez555Aún no hay calificaciones
- Evaluación Final Matemática 1.0-2021 10Documento7 páginasEvaluación Final Matemática 1.0-2021 10BRIZET MARYORET ESPINOZA LOPEZ100% (1)
- Ejercicio 1. Módulo 8.RESPUESTASDocumento4 páginasEjercicio 1. Módulo 8.RESPUESTASJulieta GarciaAún no hay calificaciones
- Foro # 1 Semana #3 MatematicasDocumento2 páginasForo # 1 Semana #3 MatematicasZARY VIVIANA OSORIO ESCOBARAún no hay calificaciones
- Reporte Tecnico Tortilleria La Mejor PDFDocumento29 páginasReporte Tecnico Tortilleria La Mejor PDFFrancisco Gómez Cárdenas100% (1)
- Hacer Facturas en VFP - CopquinDocumento15 páginasHacer Facturas en VFP - CopquinArmando LazarteAún no hay calificaciones
- Resumen de SonidoDocumento8 páginasResumen de SonidoJuana SalliesAún no hay calificaciones
- Rutic - Word - Práctica 6Documento4 páginasRutic - Word - Práctica 6aquiles1967Aún no hay calificaciones
- Actividad Practica No 9 ReaccionesDocumento29 páginasActividad Practica No 9 ReaccionesMagic MauroAún no hay calificaciones