También podría gustarte
- Manual Power BI - BásicoDocumento198 páginasManual Power BI - Básicocarbol183% (6)
- Codigo Java para Calcular IntegralesDocumento40 páginasCodigo Java para Calcular IntegralesRemigio0% (2)
- Qué Es Jasper ReportDocumento13 páginasQué Es Jasper Reportcris_2324Aún no hay calificaciones
- Fin 2Documento3 páginasFin 2Leonel CampoverdeAún no hay calificaciones
- Leer Un Potenciometro Con Processing y JfreechartDocumento3 páginasLeer Un Potenciometro Con Processing y JfreechartNéstor Fabio Montoya PalaciosAún no hay calificaciones
- CTRL ArduinoDocumento13 páginasCTRL Arduinogilbert velascoAún no hay calificaciones
- Algorimos de C++ AlgrebaDocumento19 páginasAlgorimos de C++ AlgrebalpnateraAún no hay calificaciones
- Codigo DR BladeDocumento8 páginasCodigo DR BladeRaullAún no hay calificaciones
- Manual de Funcionamiento CNCDocumento16 páginasManual de Funcionamiento CNCRogelio CajtíAún no hay calificaciones
- TAREA 1 Gonzalez MoralesDocumento28 páginasTAREA 1 Gonzalez MoralesBrissa MontielAún no hay calificaciones
- Codigos de ArduinoDocumento8 páginasCodigos de ArduinoruthAún no hay calificaciones
- Taller #7Documento10 páginasTaller #7s.rivas1Aún no hay calificaciones
- Taller #6Documento9 páginasTaller #6s.rivas1Aún no hay calificaciones
- Lenguaje ST Maniobra Paro MarchaDocumento3 páginasLenguaje ST Maniobra Paro MarchaXIMOAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byedithAún no hay calificaciones
- Librería para El Control de ServomotoresDocumento7 páginasLibrería para El Control de ServomotoresAdelaidoAún no hay calificaciones
- Clase Apuntadores 2Documento10 páginasClase Apuntadores 2Irma Dinorah LemusAún no hay calificaciones
- Robot Esquiva ObstaculosDocumento4 páginasRobot Esquiva Obstaculosservice électricité bâtimentAún no hay calificaciones
- Arbol Binario Con PreDocumento10 páginasArbol Binario Con PreFabiola VelasquezAún no hay calificaciones
- DocumentoDocumento9 páginasDocumentoArnaldo MachadoAún no hay calificaciones
- Informe Lab TeocompDocumento12 páginasInforme Lab TeocompAlex Navez MariñosAún no hay calificaciones
- Metodo BurbujaDocumento25 páginasMetodo BurbujaLuisRaúlManzanoMontesAún no hay calificaciones
- Motor Paso A Paso Ajustado A GradosDocumento2 páginasMotor Paso A Paso Ajustado A Gradosflorentino perezAún no hay calificaciones
- Guardardatosteclado)Documento2 páginasGuardardatosteclado)JUAN CARLOS PELAEZ MARTINEZAún no hay calificaciones
- Anexos TFGDocumento31 páginasAnexos TFGEddy FloresAún no hay calificaciones
- Programa Mplab XideDocumento9 páginasPrograma Mplab XideJorge Sh100% (1)
- Electrovalvula ProyectoDocumento6 páginasElectrovalvula ProyectoJenn AlavaAún no hay calificaciones
- GuiaLabPilas 2014Documento14 páginasGuiaLabPilas 2014Chepe FloresAún no hay calificaciones
- Sistema Transporte Paciente ArduinoDocumento5 páginasSistema Transporte Paciente ArduinoRaul PerezAún no hay calificaciones
- Codigo A CombinarDocumento10 páginasCodigo A CombinarMartin PerdomoAún no hay calificaciones
- Leer Desde El MonitorDocumento2 páginasLeer Desde El MonitorCompucenter SabinoAún no hay calificaciones
- Caso Problema 3Documento21 páginasCaso Problema 3Luis Farfan CruzAún no hay calificaciones
- Avance ComputacionDocumento22 páginasAvance ComputacionRicardo Angelo Ballón TitoAún no hay calificaciones
- COPIA720Documento6 páginasCOPIA720powergraphicsAún no hay calificaciones
- CarroDocumento4 páginasCarroGir EstradaAún no hay calificaciones
- Codigos ArduinoDocumento14 páginasCodigos ArduinoWillbert NungarayAún no hay calificaciones
- Taller #5Documento9 páginasTaller #5s.rivas1Aún no hay calificaciones
- Arduino3a PDFDocumento40 páginasArduino3a PDFAley C. ColenAún no hay calificaciones
- FredyyymolinaaaDocumento11 páginasFredyyymolinaaafredyAún no hay calificaciones
- DSPIC30f2010 Código C SanjayDocumento16 páginasDSPIC30f2010 Código C SanjayScribdTranslationsAún no hay calificaciones
- Coche BluetoothDocumento6 páginasCoche BluetoothCarlos Antonio LiconaAún no hay calificaciones
- Arduino 2Documento4 páginasArduino 2Carlos BaideAún no hay calificaciones
- Configuracion de GPS Gy ArduinoDocumento7 páginasConfiguracion de GPS Gy Arduinoanalisis analisisAún no hay calificaciones
- Code AyudaDocumento24 páginasCode AyudaIsabella SanchezAún no hay calificaciones
- Public Class PalindromoDocumento15 páginasPublic Class PalindromoJavier Sneider Porras MedinaAún no hay calificaciones
- Ejercicios de ModulosDocumento11 páginasEjercicios de ModulosGerson Delgado FarfanAún no hay calificaciones
- Codigo Java para Calcular IntegralesDocumento15 páginasCodigo Java para Calcular IntegralesRemigio ChagmanaAún no hay calificaciones
- Arduino Example 1Documento5 páginasArduino Example 1Laura CardenasAún no hay calificaciones
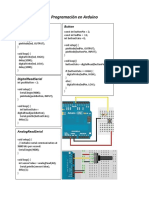
- Programación en ArduinoDocumento34 páginasProgramación en ArduinoJohn Morillo100% (1)
- Caja Negra ArduinoDocumento9 páginasCaja Negra ArduinoNavarro SalgadoAún no hay calificaciones
- Trabajando Con Store Procedures PLDocumento13 páginasTrabajando Con Store Procedures PLEdgar E. RamirezAún no hay calificaciones
- Algoritmos - Primera PracticaDocumento4 páginasAlgoritmos - Primera PracticalopezmonsalvejAún no hay calificaciones
- Codigo Mesa SismicaDocumento5 páginasCodigo Mesa Sismica0AvendanoAún no hay calificaciones
- Control Arduino EthernetDocumento4 páginasControl Arduino EthernetPao CabreraAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byJulio Gomez HernándezAún no hay calificaciones
- Crud JavaDocumento9 páginasCrud JavaKarla TorresAún no hay calificaciones
- Programacion Motor Paso A PasoDocumento4 páginasProgramacion Motor Paso A PasoguidoAún no hay calificaciones
- Control Domotico de Luces (Código)Documento6 páginasControl Domotico de Luces (Código)PacoLAún no hay calificaciones
- BlockDocumento17 páginasBlockCarolina CaceresAún no hay calificaciones
- Estado y SociedadDocumento1 páginaEstado y SociedadCarolina CaceresAún no hay calificaciones
- S13.s1 Rev1 - 1879342574Documento45 páginasS13.s1 Rev1 - 1879342574Carolina CaceresAún no hay calificaciones
- Semana 15 (1ra Parte y 2da Parte) WECHT UTP Máquinas Eléctricas Estáticas y RotativasDocumento58 páginasSemana 15 (1ra Parte y 2da Parte) WECHT UTP Máquinas Eléctricas Estáticas y RotativasCarolina CaceresAún no hay calificaciones
- DC Week 17Documento18 páginasDC Week 17Carolina CaceresAún no hay calificaciones
- Avance de Procesos para La IngenieriaDocumento4 páginasAvance de Procesos para La IngenieriaCarolina CaceresAún no hay calificaciones
- Electromagnetismo-Avance 2Documento33 páginasElectromagnetismo-Avance 2Carolina CaceresAún no hay calificaciones
- Dispositivos S5Documento33 páginasDispositivos S5Carolina CaceresAún no hay calificaciones
- UntitledDocumento1 páginaUntitledCarolina CaceresAún no hay calificaciones
- Ejercicios #1DDocumento2 páginasEjercicios #1DCarolina CaceresAún no hay calificaciones
- Ejercicios Semana 2 - Tarea No Calificada-1Documento1 páginaEjercicios Semana 2 - Tarea No Calificada-1Carolina CaceresAún no hay calificaciones
- S11.s2-Resolver EjerciciosDocumento1 páginaS11.s2-Resolver EjerciciosCarolina CaceresAún no hay calificaciones
- 1 - Bases de Atletismo 2022Documento2 páginas1 - Bases de Atletismo 2022Carolina CaceresAún no hay calificaciones
- S12.s2-Resolver EjerciciosDocumento3 páginasS12.s2-Resolver EjerciciosleslieAún no hay calificaciones
- S14.s2 Regresion Lineal - Coeficiente de Correlacion y Determinacion.RDocumento14 páginasS14.s2 Regresion Lineal - Coeficiente de Correlacion y Determinacion.RCarolina CaceresAún no hay calificaciones
- PC 3 de Estadistica 20 de Junio Del 2022Documento7 páginasPC 3 de Estadistica 20 de Junio Del 2022Carolina CaceresAún no hay calificaciones
- Electro Magnetismo - Mini Bobina de Tesla 1.0Documento44 páginasElectro Magnetismo - Mini Bobina de Tesla 1.0Carolina CaceresAún no hay calificaciones
- Little DesperdiciosDocumento4 páginasLittle DesperdiciosCarolina CaceresAún no hay calificaciones
- S10.s2 Pruebas No Parametricas - Prueba de Signos - RachasDocumento18 páginasS10.s2 Pruebas No Parametricas - Prueba de Signos - RachasCarolina CaceresAún no hay calificaciones
- Caracteristicas Sirenet PDFDocumento34 páginasCaracteristicas Sirenet PDFLeonard AbellaAún no hay calificaciones
- Guía para Montar Una Unidad Virtual Con Ultra ISODocumento4 páginasGuía para Montar Una Unidad Virtual Con Ultra ISORatapelua71Aún no hay calificaciones
- Paso A Paso Cancelacion Matriculas de Manera VirtualDocumento25 páginasPaso A Paso Cancelacion Matriculas de Manera VirtualBrayan LaguadoAún no hay calificaciones
- Introduccion Al Manejo de Graficos Utilizando OpenGL y QTDocumento9 páginasIntroduccion Al Manejo de Graficos Utilizando OpenGL y QTsalokaAún no hay calificaciones
- Curso de Vmix (Instalación)Documento7 páginasCurso de Vmix (Instalación)Aarón ViteAún no hay calificaciones
- AED1-ppt-Tema1 Con Operaciones AritmeticasDocumento73 páginasAED1-ppt-Tema1 Con Operaciones Aritmeticasjosecito gutierrezAún no hay calificaciones
- La ComputadoraDocumento20 páginasLa ComputadoraMafer Revilla CenturionAún no hay calificaciones
- Estudio Previo Equipos de ComputoDocumento6 páginasEstudio Previo Equipos de ComputoWalter RangelAún no hay calificaciones
- Explicar El Funcionamiento Del Editor de Texto de Línea de Comandos (Recuperado Automáticamente)Documento17 páginasExplicar El Funcionamiento Del Editor de Texto de Línea de Comandos (Recuperado Automáticamente)JOSE CARLOS MAR RANGELAún no hay calificaciones
- Triptico ModeloDocumento1 páginaTriptico ModeloJeanive Nin ZuritaAún no hay calificaciones
- Lab 01 - Comunicación RS232-metexDocumento13 páginasLab 01 - Comunicación RS232-metexGustavo Alvarez ManchegoAún no hay calificaciones
- Cuadro Comparativo Entre Los Sistemas OperativosDocumento2 páginasCuadro Comparativo Entre Los Sistemas OperativosOsnaider PachecoAún no hay calificaciones
- Informe Lab PLCDocumento11 páginasInforme Lab PLCraulAún no hay calificaciones
- Resumen Microcontrolador PIC18F4550Documento5 páginasResumen Microcontrolador PIC18F4550Viiktorr Rodriguez50% (2)
- Proyecto RED LAN - Redes de TelecomunicacionesDocumento24 páginasProyecto RED LAN - Redes de TelecomunicacionesRonnyGuillen55100% (1)
- Teoría Del VoleibolDocumento7 páginasTeoría Del VoleibolOtto Mongui RomeroAún no hay calificaciones
- Protocolo SDLCDocumento8 páginasProtocolo SDLCllavellave1Aún no hay calificaciones
- 0.6 JavaRockStarDocumento21 páginas0.6 JavaRockStarisc_fjmvAún no hay calificaciones
- Paper AcceleoDocumento3 páginasPaper AcceleoKevinMarcilloAún no hay calificaciones
- TESIS Santos Olmo Parra - UnlockedDocumento529 páginasTESIS Santos Olmo Parra - UnlockedRaùl Gallegos HerreraAún no hay calificaciones
- Practica No 4 Lab Pic18f Mplabx 2019Documento7 páginasPractica No 4 Lab Pic18f Mplabx 2019Chairo PloxAún no hay calificaciones
- Practica 11Documento2 páginasPractica 11carla informaticaAún no hay calificaciones
- Mapa Mental Herramientas AutoCADDocumento4 páginasMapa Mental Herramientas AutoCADCarlos Alberto MuñozAún no hay calificaciones
- Digitalizacion Vs Industria 4 0 ESDocumento1 páginaDigitalizacion Vs Industria 4 0 ESJon De la Cruz IkazategiAún no hay calificaciones
- Aficiompc4502 5502Documento8 páginasAficiompc4502 5502api-377583953Aún no hay calificaciones
- Calidad y ServicioDocumento15 páginasCalidad y ServicioWilli ToAún no hay calificaciones
- VIDEODocumento11 páginasVIDEOAlfredo ValladaresAún no hay calificaciones
- Mecatronica 2Documento14 páginasMecatronica 2Patricia MorenoAún no hay calificaciones