También podría gustarte
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Material de Algebra 5to Secundaria PolinomiosDocumento3 páginasMaterial de Algebra 5to Secundaria PolinomiosBernabé Tigrepapi Juli Anchapuri100% (1)
- Hoja de EjerciciosDocumento3 páginasHoja de Ejerciciosjofre cacaAún no hay calificaciones
- Demostracion de Las Propiedades de Calculo IntegralDocumento11 páginasDemostracion de Las Propiedades de Calculo IntegralMaik Barboza100% (2)
- Pauta Examen Matematicas Aplicadas 2021Documento6 páginasPauta Examen Matematicas Aplicadas 2021DIEGO MAURICIO GARRIDO VENEGASAún no hay calificaciones
- 2012 - 01 - Letra y Solucion - Examen PDFDocumento3 páginas2012 - 01 - Letra y Solucion - Examen PDF7it62019 electrotecniaAún no hay calificaciones
- Parcial GAL1 AL 2022Documento4 páginasParcial GAL1 AL 2022SakiAún no hay calificaciones
- 2009 - 12 - Letra - Examen PDFDocumento4 páginas2009 - 12 - Letra - Examen PDF7it62019 electrotecniaAún no hay calificaciones
- Ejercicios de Algebra LinealDocumento4 páginasEjercicios de Algebra LinealMartinsibirisAún no hay calificaciones
- Interpolación D Taylor, Lagrange y NewtonDocumento10 páginasInterpolación D Taylor, Lagrange y NewtonAlvaro Espinosa PerezAún no hay calificaciones
- Ev2 525148 2021 T1 PautaDocumento11 páginasEv2 525148 2021 T1 PautaJefferson PinzonAún no hay calificaciones
- Apunte 6 Algebra LinealDocumento10 páginasApunte 6 Algebra Linealyordan aguilar ruizAún no hay calificaciones
- Resolución Del Segundo Examen ParcialDocumento12 páginasResolución Del Segundo Examen ParcialYou KimAún no hay calificaciones
- Semana 6-POLINOMIOS PARTE 1 (MCD)Documento10 páginasSemana 6-POLINOMIOS PARTE 1 (MCD)CRISTHIAN EDEL ESQUIVEL PARDAVEAún no hay calificaciones
- Pauta I2Documento4 páginasPauta I2felipe quezadaAún no hay calificaciones
- HW 01Documento3 páginasHW 01Alonso CasanovaAún no hay calificaciones
- 2 AplicacionesDocumento3 páginas2 AplicacionesNicolette BelenAún no hay calificaciones
- Pregunta P1.1 P1.2 P1.3 P1.4 Alternativa Correcta F V F FDocumento4 páginasPregunta P1.1 P1.2 P1.3 P1.4 Alternativa Correcta F V F FPedro PerezAún no hay calificaciones
- 30a Edición de Olimpiada Nacional de Matemáticas en Chile (2018)Documento4 páginas30a Edición de Olimpiada Nacional de Matemáticas en Chile (2018)José Ignacio Cuevas BarrientosAún no hay calificaciones
- Taller 3 Álgebra Lineal 2019 1Documento3 páginasTaller 3 Álgebra Lineal 2019 1JhonatanAún no hay calificaciones
- Tarea 4 07-07Documento5 páginasTarea 4 07-07william triana perdomoAún no hay calificaciones
- I2 Mat1630 2023Documento5 páginasI2 Mat1630 2023javierAún no hay calificaciones
- RepasoDocumento3 páginasRepasoshalalalaAún no hay calificaciones
- Practica 3MAT103Documento6 páginasPractica 3MAT103Miguel ÁngelAún no hay calificaciones
- Guia 3 - Transformaciones LinealesDocumento6 páginasGuia 3 - Transformaciones LinealesKamiiIgnaciaAún no hay calificaciones
- Teor A de FloquetDocumento8 páginasTeor A de FloquetNicolas RMAún no hay calificaciones
- Ejercicios Resueltos Transformaciones Lineales PDFDocumento4 páginasEjercicios Resueltos Transformaciones Lineales PDFAugusto RodriguezAún no hay calificaciones
- Práctica Calificada 4 - Álgebra Lineal (BMA03) : Página 1 de ?? Ciclo 2020-2Documento2 páginasPráctica Calificada 4 - Álgebra Lineal (BMA03) : Página 1 de ?? Ciclo 2020-2ISAAC ELIAS RIVAS FLORESAún no hay calificaciones
- Taller AL3Documento4 páginasTaller AL3Juan Angel Mendieta ArenasAún no hay calificaciones
- Parcial de An Alisis de Datos - Primer Parcial - 2da Fecha: Ejercicio 1Documento6 páginasParcial de An Alisis de Datos - Primer Parcial - 2da Fecha: Ejercicio 1Fede SiriAún no hay calificaciones
- CURVAS Practica Dirigida El Triedro de FrenetDocumento5 páginasCURVAS Practica Dirigida El Triedro de Frenetgabriel olivasAún no hay calificaciones
- Enero 2019Documento2 páginasEnero 2019845675 845675Aún no hay calificaciones
- Guia Semana10 - Algebra Lineal - Daniel SaaDocumento3 páginasGuia Semana10 - Algebra Lineal - Daniel Saajavier.arenasAún no hay calificaciones
- DEBERESDocumento2 páginasDEBERESJaque Guayas GuayasAún no hay calificaciones
- Universidad Nacional de Ingenier IaDocumento3 páginasUniversidad Nacional de Ingenier IaJunior Ortega TurpoAún no hay calificaciones
- ALI Tarea5 2022Documento2 páginasALI Tarea5 2022Cuenta DesechableAún no hay calificaciones
- I1 2305 PautaDocumento4 páginasI1 2305 PautaDesorter DsrAún no hay calificaciones
- Ed 10Documento2 páginasEd 10José Carlos Catacora CallizayaAún no hay calificaciones
- TP Transformaciones LinealesDocumento4 páginasTP Transformaciones LinealesGenaro LabrinAún no hay calificaciones
- Tarea 3 Primavera 2019Documento2 páginasTarea 3 Primavera 2019Exequiel Venegas ApablazaAún no hay calificaciones
- Auxiliar 6 Preparaci N C2Documento2 páginasAuxiliar 6 Preparaci N C2José Ignacio Calderón VillarrealAún no hay calificaciones
- Practica de Algebra Lineal 3 Er ParcialDocumento8 páginasPractica de Algebra Lineal 3 Er Parcialjose fernandoAún no hay calificaciones
- Olimpiada MathRocks Imternacional PDFDocumento17 páginasOlimpiada MathRocks Imternacional PDFOsiris ApoloAún no hay calificaciones
- 2 PPT Teoría Polinomios 2019Documento23 páginas2 PPT Teoría Polinomios 2019Germán GreulachAún no hay calificaciones
- Evaluacion2EnsayoSolucion Algebra 2Documento4 páginasEvaluacion2EnsayoSolucion Algebra 2Daniel GermanyAún no hay calificaciones
- Ep - Lec 3Documento6 páginasEp - Lec 3Gabriel EstradaAún no hay calificaciones
- Algebra Lineal Taller 5 Transformaciones Lineales y Valores y Vectores PropiosDocumento314 páginasAlgebra Lineal Taller 5 Transformaciones Lineales y Valores y Vectores PropiosFelipe Chaves DelgadilloAún no hay calificaciones
- Ejercicios 2 Mate IIIDocumento4 páginasEjercicios 2 Mate IIID. Francisco MedranoAún no hay calificaciones
- Pauta Prueba Parcial N3 Bain073 Algebra Lineal para Ingenier IADocumento5 páginasPauta Prueba Parcial N3 Bain073 Algebra Lineal para Ingenier IABenjamin Toledo RiveraAún no hay calificaciones
- Pc4 2012 0.solucionarioDocumento8 páginasPc4 2012 0.solucionarioErasmoAún no hay calificaciones
- TP1 Con EnlacesDocumento7 páginasTP1 Con EnlacesVanesa MendezAún no hay calificaciones
- Integrales Curvilineas o de LineaDocumento39 páginasIntegrales Curvilineas o de LineaElmer Acero ZapanaAún no hay calificaciones
- Algebra Lineal CAL3 PDFDocumento1 páginaAlgebra Lineal CAL3 PDFLuis JoOnatanAún no hay calificaciones
- Transformaciones LinealesDocumento2 páginasTransformaciones LinealesMatias Ignacio JaraAún no hay calificaciones
- Distribución BinomialDocumento7 páginasDistribución BinomialPandita GarciaAún no hay calificaciones
- Guía 1Documento3 páginasGuía 1JulianAún no hay calificaciones
- GAL 2practico 9 (R)Documento7 páginasGAL 2practico 9 (R)Lucía Izquierdo0% (1)
- Taller 1FuncionesVectorialesDocumento4 páginasTaller 1FuncionesVectorialesSebastiánValenciaAún no hay calificaciones
- Curvas Alabeadas Problemas Resueltos2Documento5 páginasCurvas Alabeadas Problemas Resueltos2XTRA31Aún no hay calificaciones
- Pauta Certamen 2 2023-1Documento5 páginasPauta Certamen 2 2023-1ssancheztoro2002Aún no hay calificaciones
- Apunte CVVDocumento60 páginasApunte CVVclases.particulares.mfu16Aún no hay calificaciones
- Apunte de Analisis Version 20 05 22Documento286 páginasApunte de Analisis Version 20 05 22clases.particulares.mfu16Aún no hay calificaciones
- Apunte CVVDocumento60 páginasApunte CVVclases.particulares.mfu16Aún no hay calificaciones
- Ejercicios I2 Fiz 0121Documento2 páginasEjercicios I2 Fiz 0121clases.particulares.mfu16Aún no hay calificaciones
- GreedyDocumento4 páginasGreedydavid__mineAún no hay calificaciones
- Clase 2 DerivadasDocumento8 páginasClase 2 DerivadasViri MedinaAún no hay calificaciones
- Ejercicio 4 - Literal D - Nazly RaigozaDocumento6 páginasEjercicio 4 - Literal D - Nazly RaigozaTATIANAAún no hay calificaciones
- TopologiaDocumento17 páginasTopologiaAnnaAún no hay calificaciones
- Trabajo 2019-IDocumento8 páginasTrabajo 2019-IEros Jeanpierre Bazán CalderónAún no hay calificaciones
- Tarea 8 (Polinomios de Newton)Documento3 páginasTarea 8 (Polinomios de Newton)Andres VasquezAún no hay calificaciones
- Unidad 2.5 Funciones Trigonométricas Inversas - Ecuaciones TrigonométricasDocumento31 páginasUnidad 2.5 Funciones Trigonométricas Inversas - Ecuaciones TrigonométricasDiegoErazoRodriguezAún no hay calificaciones
- Formulario Robotica 1Documento8 páginasFormulario Robotica 1alexs24masAún no hay calificaciones
- FuncionesDocumento26 páginasFuncionesLuisa Ana Trejo CalatayudAún no hay calificaciones
- Tarea N.-1 - Límites.Documento2 páginasTarea N.-1 - Límites.Emerson ReizanchoAún no hay calificaciones
- Teoria de Exponentes - Ecuaciones ExponencialesDocumento3 páginasTeoria de Exponentes - Ecuaciones ExponencialesBruno S.Aún no hay calificaciones
- Solucionario Demidovich Tomo 2Documento199 páginasSolucionario Demidovich Tomo 2Iracelma NoyAún no hay calificaciones
- Guía de Actividad - Exposición Runge Kutta - 0205Documento2 páginasGuía de Actividad - Exposición Runge Kutta - 0205Diego Sandoval TarifaAún no hay calificaciones
- GrafosDocumento5 páginasGrafosAriannyAún no hay calificaciones
- 3.2.3 Derivadas, Limites y TeoremasDocumento41 páginas3.2.3 Derivadas, Limites y TeoremasBarriosAravenaAún no hay calificaciones
- Transformadas LaplaceDocumento43 páginasTransformadas LaplaceJooche SinclairAún no hay calificaciones
- Principios de Algebra LinealDocumento7 páginasPrincipios de Algebra LinealOsvaldo Gomez DiazAún no hay calificaciones
- FuncionesDocumento25 páginasFuncionesAngel MikiAún no hay calificaciones
- Tarea 4Documento1 páginaTarea 4Arley SierraAún no hay calificaciones
- I Examen I Periodo Undecimo 2023Documento7 páginasI Examen I Periodo Undecimo 2023Miguel Fisicamatematicas MatemáticasAún no hay calificaciones
- Trabajo de InvestigaciónDocumento8 páginasTrabajo de InvestigaciónSebastian LugohAún no hay calificaciones
- Matrices de IncidenciaDocumento8 páginasMatrices de IncidencialinoguerrachotaAún no hay calificaciones
- Algoritmo de Biseccion - MatlabDocumento1 páginaAlgoritmo de Biseccion - MatlabLucki Alan Fernandez SalcedoAún no hay calificaciones
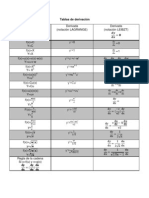
- Formulario de DerivadasDocumento1 páginaFormulario de DerivadasMiguel Lopez100% (1)
- Ecuaciones de Segundo Grado para Tercero de SecundariaDocumento7 páginasEcuaciones de Segundo Grado para Tercero de SecundariaGILMER DEONICIO ORDOÑEZ AGUILAR100% (1)
- Límites TrigonométricosDocumento9 páginasLímites TrigonométricosSimón Arce VidalAún no hay calificaciones
- Estructura Discretas (Definitivo)Documento34 páginasEstructura Discretas (Definitivo)diazjap100% (2)
- Limites Al Infinito-Matemc3a1ticas-1 - CD - ZillDocumento9 páginasLimites Al Infinito-Matemc3a1ticas-1 - CD - ZillOlive EncarnaciónAún no hay calificaciones
- Matrices y DeterminantesDocumento33 páginasMatrices y DeterminantesGisel RamosAún no hay calificaciones