También podría gustarte
- Ficha Técnica CloroxDocumento1 páginaFicha Técnica CloroxMiguel Angel44% (16)
- Ecuaciones FÓRMULAS DE CARDANODocumento19 páginasEcuaciones FÓRMULAS DE CARDANOadrianayepez20075364Aún no hay calificaciones
- PC3 AMGA 17-19 SolucionarioDocumento3 páginasPC3 AMGA 17-19 SolucionarioandresorellanabAún no hay calificaciones
- Taller 1 Especiales 2Documento2 páginasTaller 1 Especiales 2Juli MarínAún no hay calificaciones
- Examen Final de Algebra y Geometr Ia Anal Itica: Modelo de Resoluci On 15 de Febrero de 2022Documento10 páginasExamen Final de Algebra y Geometr Ia Anal Itica: Modelo de Resoluci On 15 de Febrero de 2022Emanuel AlborAún no hay calificaciones
- Sistema BidimensionalDocumento29 páginasSistema BidimensionalAmIn20122100% (1)
- Las Fórmulas de Cardano-Ferrari-IvorraDocumento19 páginasLas Fórmulas de Cardano-Ferrari-Ivorrawladimir o,fAún no hay calificaciones
- Ejercicio ParametrizaciónDocumento8 páginasEjercicio ParametrizaciónKathy Rodríguez VillegasAún no hay calificaciones
- 009 $ (Z - A) N $ Raíz EnésimaDocumento5 páginas009 $ (Z - A) N $ Raíz EnésimaIngridAún no hay calificaciones
- Coordenadas Polares PDFDocumento21 páginasCoordenadas Polares PDFJean Carlos PimentelAún no hay calificaciones
- Ejercicios de Proyecciones y Transformaciones OrtogonalesDocumento4 páginasEjercicios de Proyecciones y Transformaciones Ortogonalesteo remaAún no hay calificaciones
- COMO RESOLVER Ecuaciones de Tercer Grado PDFDocumento19 páginasCOMO RESOLVER Ecuaciones de Tercer Grado PDFMat PérezAún no hay calificaciones
- Coordenadas PolaresDocumento9 páginasCoordenadas Polaresarnold romanAún no hay calificaciones
- 2020 Junio Examen y Solucion 1Documento5 páginas2020 Junio Examen y Solucion 1PeterAún no hay calificaciones
- Ej. D. VectoresDocumento16 páginasEj. D. VectoresĄłęx Ķvň Żv ŢíímAún no hay calificaciones
- PrimeraOrdinaria AlgebraDocumento3 páginasPrimeraOrdinaria AlgebraJorge MorielAún no hay calificaciones
- 03 Dic 2021 Turno2 ResueltoDocumento3 páginas03 Dic 2021 Turno2 ResueltoNaiara Estefanía NaveiraAún no hay calificaciones
- Polares Cal 2Documento22 páginasPolares Cal 2Shigeru GonzalesAún no hay calificaciones
- La Rioja Matematicas-2018 SolcDocumento9 páginasLa Rioja Matematicas-2018 SolcRebeca lanauAún no hay calificaciones
- PAIEP Sistema Polar APT 2019Documento8 páginasPAIEP Sistema Polar APT 2019Snayder NilsAún no hay calificaciones
- Coordenadas PolaresDocumento7 páginasCoordenadas PolaresJunior Artur Carmen VilelaAún no hay calificaciones
- Apunte - Vectores - 2ºparteDocumento8 páginasApunte - Vectores - 2ºparteAntonella MoscovakisAún no hay calificaciones
- Geometría en El Plano-Recta (2020) PDFDocumento15 páginasGeometría en El Plano-Recta (2020) PDFVanesa ZualetAún no hay calificaciones
- Olimpiada Internacional de Matemáticas, Problemas de AlgebraDocumento10 páginasOlimpiada Internacional de Matemáticas, Problemas de AlgebraJose HilarioAún no hay calificaciones
- Material 3Documento17 páginasMaterial 3Alan ArevaloAún no hay calificaciones
- Módulo 1 Vectores y Trigonometría PDFDocumento43 páginasMódulo 1 Vectores y Trigonometría PDFTomas AlvaAún no hay calificaciones
- 2 Resolucion - OrdinariaDocumento7 páginas2 Resolucion - Ordinarianada chahbounAún no hay calificaciones
- Unidad 4Documento18 páginasUnidad 4SANTIAGO DAMASO RODRIGUEZ MARTINEZAún no hay calificaciones
- II Unidad. - COORDENADAS POLARESDocumento8 páginasII Unidad. - COORDENADAS POLARESRicardo Andrés Guzmán GonzálezAún no hay calificaciones
- 03 Dic 2021 Turno3 RESUELTODocumento3 páginas03 Dic 2021 Turno3 RESUELTONaiara Estefanía NaveiraAún no hay calificaciones
- I2 Mat1630 2023Documento5 páginasI2 Mat1630 2023javierAún no hay calificaciones
- Examen y SolucionDocumento6 páginasExamen y SolucionPeterAún no hay calificaciones
- Guía #1-Geometría-Sistemas CoordenadosDocumento18 páginasGuía #1-Geometría-Sistemas CoordenadosGabriela Florez LenguaAún no hay calificaciones
- HojaEjercicios Vectorial02 SolDocumento6 páginasHojaEjercicios Vectorial02 SolJorgeAún no hay calificaciones
- Teoria RectasDocumento4 páginasTeoria RectasIsmael RuizAún no hay calificaciones
- 12Documento3 páginas12Martín BustamanteAún no hay calificaciones
- Prelimina ResDocumento6 páginasPrelimina ResJosselyn GameAún no hay calificaciones
- Sol - Examen FinalDocumento3 páginasSol - Examen FinalLinda Salazar FloresAún no hay calificaciones
- Taller 2 Algebra LinealDocumento3 páginasTaller 2 Algebra LinealValentina Silva MartínezAún no hay calificaciones
- Ecuaciones de La Recta en El PlanoDocumento9 páginasEcuaciones de La Recta en El PlanoCarmen GAún no hay calificaciones
- Módulo 1 Vectores y TrigonometríaDocumento45 páginasMódulo 1 Vectores y TrigonometríaAnonymous Nzf9XA50% (2)
- C2 - Parte 2 - PlanoDocumento9 páginasC2 - Parte 2 - PlanoMilton Alejandro CuencaAún no hay calificaciones
- GaussDocumento22 páginasGaussguidexAún no hay calificaciones
- Soluciones PrimerParBII2021Documento4 páginasSoluciones PrimerParBII2021ROXANA CASTILLO MAMANIAún no hay calificaciones
- Wa0028Documento44 páginasWa0028Ariadna Santos0% (1)
- 51n Matemáticas VDocumento35 páginas51n Matemáticas Vjuanchoo calzadaAún no hay calificaciones
- EjerciciosDocumento9 páginasEjerciciosLeonardo WalterAún no hay calificaciones
- Modelo de Parcial Algebra UBA XXI 6Documento3 páginasModelo de Parcial Algebra UBA XXI 6Martín BustamanteAún no hay calificaciones
- CongruenciasDocumento4 páginasCongruenciasGonzalo Velasco ArrietaAún no hay calificaciones
- Polinomios 2Documento13 páginasPolinomios 2Dylan VillalbaAún no hay calificaciones
- 3.1 Rectas en El EspacioDocumento14 páginas3.1 Rectas en El Espacio2021 Act HERNANDEZ MOTA LUIS FERNANDOAún no hay calificaciones
- Curvatura de GaussDocumento22 páginasCurvatura de GaussIngrid YaniraAún no hay calificaciones
- 002 Examen de Geometría Con SolucionesDocumento4 páginas002 Examen de Geometría Con SolucionesVuvivi JsjsjssjsAún no hay calificaciones
- Aligeoi t11 1Documento30 páginasAligeoi t11 1Miguel LópezAún no hay calificaciones
- 04-P1 14-7-2016 T2 Con RtasDocumento2 páginas04-P1 14-7-2016 T2 Con RtasSofia SooAún no hay calificaciones
- WWW Yoquieroaprobar EsDocumento2 páginasWWW Yoquieroaprobar EsAna OlmedaAún no hay calificaciones
- Notas - Forma - Normal - Dvi - Desconocido PDFDocumento12 páginasNotas - Forma - Normal - Dvi - Desconocido PDFjose artigasAún no hay calificaciones
- Práctica 8 TermisorDocumento10 páginasPráctica 8 TermisorGris DotorAún no hay calificaciones
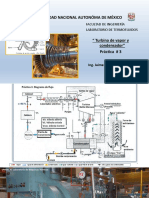
- LTF.P3. Turbina de Vapor y Condensadores.2022-1.okDocumento34 páginasLTF.P3. Turbina de Vapor y Condensadores.2022-1.okEnrique Salinas CorroAún no hay calificaciones
- Pregunta 1 (5 P)Documento1 páginaPregunta 1 (5 P)Jesus CastilloAún no hay calificaciones
- Planificación Cs. Naturales 8° Unidad 3Documento3 páginasPlanificación Cs. Naturales 8° Unidad 3SandraFaríasAcuñaAún no hay calificaciones
- Guia 7 Grado 10 QuimicaDocumento4 páginasGuia 7 Grado 10 Quimicaalexander cordobaAún no hay calificaciones
- Analisis Estructural AvanzadoDocumento68 páginasAnalisis Estructural AvanzadoKarol Daniela FerAún no hay calificaciones
- Catálogo Ventiladores Auxiliares HowdenDocumento26 páginasCatálogo Ventiladores Auxiliares Howdenangelo ramirezAún no hay calificaciones
- Diapositiva G8Documento17 páginasDiapositiva G8Raiber V.L.Aún no hay calificaciones
- BitácoraDocumento9 páginasBitácoraSteven ZúñigaAún no hay calificaciones
- Kit Hidraulico 2 IeDocumento5 páginasKit Hidraulico 2 IeIván CascudoAún no hay calificaciones
- Taps o DerivacionDocumento1 páginaTaps o DerivacioncarlosAún no hay calificaciones
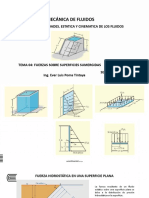
- Tema 04 Fuerzas Sobre Superficies SumergidasDocumento35 páginasTema 04 Fuerzas Sobre Superficies SumergidasYsac Bpc100% (1)
- CGS - Pets - 03 - Energizar Vent y BombasDocumento4 páginasCGS - Pets - 03 - Energizar Vent y BombasFranco VilcamangoAún no hay calificaciones
- Ficha Tecnica Microesfera Reflexo 2022Documento2 páginasFicha Tecnica Microesfera Reflexo 2022Yuriko ArakakiAún no hay calificaciones
- Quimica AnaliticaDocumento11 páginasQuimica AnaliticaGimena QzcAún no hay calificaciones
- UNIDAD 1. Principios Básicos de QuímicaDocumento32 páginasUNIDAD 1. Principios Básicos de QuímicaYOANIAún no hay calificaciones
- Examen Final - 13 - 09 - 18Documento1 páginaExamen Final - 13 - 09 - 18Miguel GAún no hay calificaciones
- Contadores de Agua (Medidores de Caudal - ABB)Documento8 páginasContadores de Agua (Medidores de Caudal - ABB)Andreina PerdomoAún no hay calificaciones
- Manual - Sundyne AT 68-11Documento115 páginasManual - Sundyne AT 68-11Javier Santana GarcíaAún no hay calificaciones
- Ley de Enfriamiento de NewtonDocumento4 páginasLey de Enfriamiento de NewtonJohn CabreraAún no hay calificaciones
- Mec - I - NFD - Taller - Electrotecnia y MedidasDocumento7 páginasMec - I - NFD - Taller - Electrotecnia y MedidasIvan SantanderAún no hay calificaciones
- Paradero y BancasDocumento1 páginaParadero y BancasGRUPO LOPCOR S.C.R.LAún no hay calificaciones
- Capitulo IV Lixiviacion de Minerales de CobreDocumento59 páginasCapitulo IV Lixiviacion de Minerales de CobreARLEN SCOLY MAMANI ONSIHUAYAún no hay calificaciones
- Diagnostico EnergeticoDocumento10 páginasDiagnostico EnergeticoIdael GonzalezAún no hay calificaciones
- Tecnico ZionDocumento118 páginasTecnico ZionCefirel_grifonAún no hay calificaciones
- Como Funciona Una PistolaDocumento2 páginasComo Funciona Una PistolaManuel Infante100% (1)
- Que Es La BaquelitaDocumento4 páginasQue Es La BaquelitaDiego NuñezAún no hay calificaciones
- Quimica 2023 Editado Full HDDocumento653 páginasQuimica 2023 Editado Full HDBrayan YampierAún no hay calificaciones
- Lab. Mate IiiDocumento2 páginasLab. Mate IiiEDWARD EDUD ZUTA MONTALVANAún no hay calificaciones