También podría gustarte
- Modulo 10Documento28 páginasModulo 10Darlyn quirozAún no hay calificaciones
- Integral Definida y Sus AplicacionesDocumento20 páginasIntegral Definida y Sus AplicacionesJazmin HerreraAún no hay calificaciones
- Taller Segundo Parcial Calculo Integral UdeADocumento6 páginasTaller Segundo Parcial Calculo Integral UdeAVanessa SanteroAún no hay calificaciones
- Integración: primitivas, cambio de variable e integración por partesDocumento17 páginasIntegración: primitivas, cambio de variable e integración por partesBrandy CainicelaAún no hay calificaciones
- Taller Segundo Parcial Cálculo Integral UdeADocumento6 páginasTaller Segundo Parcial Cálculo Integral UdeAJosé ManuelAún no hay calificaciones
- Sesion 10 CalculoDocumento33 páginasSesion 10 CalculoROCAYAún no hay calificaciones
- Taller Calculo DiferencialDocumento10 páginasTaller Calculo DiferencialLina MarcelaAún no hay calificaciones
- Taller 16Documento4 páginasTaller 16Matias TobarAún no hay calificaciones
- Derivadas de funciones compuestas y regla de la cadenaDocumento23 páginasDerivadas de funciones compuestas y regla de la cadenaDiego Bravo GrausAún no hay calificaciones
- Taller 2Documento4 páginasTaller 2LUIS CARLOS ROMERO ZAPATAAún no hay calificaciones
- Taller No 2 GarzónDocumento4 páginasTaller No 2 GarzónJoan FernandezAún no hay calificaciones
- Material de Información-3-Mate2.Documento8 páginasMaterial de Información-3-Mate2.Patrick Nauca GamonalAún no hay calificaciones
- Hoja32012 13Documento5 páginasHoja32012 13HolixiiiAún no hay calificaciones
- Taller de Calculo IntegralDocumento2 páginasTaller de Calculo IntegralJorge DeutschAún no hay calificaciones
- Taller No 2Documento4 páginasTaller No 2Natalia MontillaAún no hay calificaciones
- Tema3 PDFDocumento42 páginasTema3 PDFAsís López EfracioAún no hay calificaciones
- Taller 1 CalculointegralDocumento2 páginasTaller 1 CalculointegralyearizamAún no hay calificaciones
- Introduccion Calculo 22p Glo MatDocumento2 páginasIntroduccion Calculo 22p Glo Matal2233037648Aún no hay calificaciones
- Facultad de Ingenier Ia Departamento de Matem Aticas, F Isica y Estad IsticaDocumento3 páginasFacultad de Ingenier Ia Departamento de Matem Aticas, F Isica y Estad IsticaMaria Alejandra Albornoz PovedaAún no hay calificaciones
- Práctica de derivadas y curvas en Cálculo IDocumento5 páginasPráctica de derivadas y curvas en Cálculo IJuan JimenezAún no hay calificaciones
- 2_Integrales (1)Documento4 páginas2_Integrales (1)javiAún no hay calificaciones
- Taller Calculo IntegralDocumento7 páginasTaller Calculo Integralmunoz161Aún no hay calificaciones
- Guia1 - Calculo2Documento7 páginasGuia1 - Calculo2MAXIMILIANO MORALES LOPEZAún no hay calificaciones
- Análisis Matemático I (2022): Trabajo Práctico 9Documento3 páginasAnálisis Matemático I (2022): Trabajo Práctico 9LUIS MILLANAún no hay calificaciones
- Ejercicios 3 y 4 Calculo Integral.Documento3 páginasEjercicios 3 y 4 Calculo Integral.Victor Lopez CampoAún no hay calificaciones
- Unidad 4 - Cálculo IntegralDocumento22 páginasUnidad 4 - Cálculo IntegralmarianelayeguaAún no hay calificaciones
- Integración tema 2 ADE Finanzas ContabilidadDocumento5 páginasIntegración tema 2 ADE Finanzas ContabilidadPaula DiazAún no hay calificaciones
- Ej Integrles IndefinidasDocumento22 páginasEj Integrles Indefinidasj4bpeAún no hay calificaciones
- Taller10 Calc1 SemII 21Documento3 páginasTaller10 Calc1 SemII 21MELANNIE SOPHIA BORJA PINTOAún no hay calificaciones
- Ejercicios 2Documento3 páginasEjercicios 2Maria CastroAún no hay calificaciones
- Notas Sobre IntegralesDocumento21 páginasNotas Sobre IntegralesCalzonesdefuego123Aún no hay calificaciones
- Guia 8Documento4 páginasGuia 8FREDI PASTEN APABLAZAAún no hay calificaciones
- IntegraciónDocumento39 páginasIntegraciónRuben OreamunoAún no hay calificaciones
- AM1 - TP 8 - 2023 Version FinalDocumento12 páginasAM1 - TP 8 - 2023 Version Finalfacundo batistaAún no hay calificaciones
- Ficha de Estudio 3Documento2 páginasFicha de Estudio 3FabianAún no hay calificaciones
- Sesión 1 Antiderivada y Linealidad PDFDocumento5 páginasSesión 1 Antiderivada y Linealidad PDFSebastián TorresAún no hay calificaciones
- Parcial 3 - Cálculo Univariado - EnunciadosDocumento3 páginasParcial 3 - Cálculo Univariado - EnunciadosMiyerlan VelasquezAún no hay calificaciones
- Cálculo Integral Taller 2: integrales, derivadas y áreasDocumento3 páginasCálculo Integral Taller 2: integrales, derivadas y áreasJuan José Gutierrez VascoAún no hay calificaciones
- Unidad 8. Metodos de IntegracionDocumento20 páginasUnidad 8. Metodos de IntegracionFlores Rosas Luis FernandoAún no hay calificaciones
- Semanal 8Documento1 páginaSemanal 8Diego JiménezAún no hay calificaciones
- Clase Integral para El EA-2020-1Documento3 páginasClase Integral para El EA-2020-1CARLOS JESUS ESPIRITU SILVESTREAún no hay calificaciones
- Ejercicio Tarea 3Documento4 páginasEjercicio Tarea 3andres lozanoAún no hay calificaciones
- Ejercicio Tarea 3Documento4 páginasEjercicio Tarea 3andres lozanoAún no hay calificaciones
- Ejercicio Tarea 3Documento4 páginasEjercicio Tarea 3andres lozanoAún no hay calificaciones
- Integral Definidas AplicacionesDocumento3 páginasIntegral Definidas Aplicacionesmaria garcesAún no hay calificaciones
- Tema 3 Cálculo IntegralDocumento53 páginasTema 3 Cálculo IntegralMaría RevellesAún no hay calificaciones
- Listado 2-CIIDocumento3 páginasListado 2-CIImartinarojas991Aún no hay calificaciones
- Ayudantia Set 05Documento2 páginasAyudantia Set 05nicolasAún no hay calificaciones
- Guia2 - Integracion y AreasDocumento1 páginaGuia2 - Integracion y AreasROBERTO ROMANAún no hay calificaciones
- Tema 9. Cálculo IntegralDocumento24 páginasTema 9. Cálculo IntegralCarolina CortesAún no hay calificaciones
- 1guia Unidad 1Documento3 páginas1guia Unidad 1Quetzalli ValentinaAún no hay calificaciones
- Integrales IndefinidasDocumento29 páginasIntegrales IndefinidasEdwin Antonio Criollo LimacheAún no hay calificaciones
- 2020-1 Cálculo 1 Tarea Examen FuncionesDocumento4 páginas2020-1 Cálculo 1 Tarea Examen FuncionesAriel Andrés Saenz BurrolaAún no hay calificaciones
- Integrales IndefinidasDocumento29 páginasIntegrales IndefinidasanaAún no hay calificaciones
- Taller Ecuaciones Coord Polares 1Documento22 páginasTaller Ecuaciones Coord Polares 1Luis felipe Ayala murilloAún no hay calificaciones
- C Alculo 1Documento3 páginasC Alculo 1Iresolka 25Aún no hay calificaciones
- S10 PPT IntegralDefinida CálculoDeÁreasDocumento55 páginasS10 PPT IntegralDefinida CálculoDeÁreasJose Carlos Siccha BlasAún no hay calificaciones
- Taller 1Documento2 páginasTaller 1Oscar TorresAún no hay calificaciones
- Atraidoportifulloelseñorzorro 48595959Documento3 páginasAtraidoportifulloelseñorzorro 48595959Flor HernandezAún no hay calificaciones
- UeodcuentoloszanganosylasabejasmmmsdDocumento1 páginaUeodcuentoloszanganosylasabejasmmmsdFlor HernandezAún no hay calificaciones
- Blanca NievesDocumento2 páginasBlanca NievesPsicopedagogoRojoAún no hay calificaciones
- 146 154funcionexjponencialysusaplicacionesRFEMAVADGDRDocumento9 páginas146 154funcionexjponencialysusaplicacionesRFEMAVADGDRFlor HernandezAún no hay calificaciones
- 3U493ELPATOLIBTOEKJDKJEFEODJDJF887676666Documento3 páginas3U493ELPATOLIBTOEKJDKJEFEODJDJF887676666Flor HernandezAún no hay calificaciones
- 91 92 93definiciondereivadaRFEMDocumento8 páginas91 92 93definiciondereivadaRFEMFlor HernandezAún no hay calificaciones
- Pagas147 Pagslafuncionexponecial34Documento5 páginasPagas147 Pagslafuncionexponecial34Flor HernandezAún no hay calificaciones
- 3U493ELPATOLIBTOEKJDKJEFEODJDJF887676666Documento3 páginas3U493ELPATOLIBTOEKJDKJEFEODJDJF887676666Flor HernandezAún no hay calificaciones
- Cuento de Caperucita RojaDocumento2 páginasCuento de Caperucita RojaNickol Cáceres MandarachiAún no hay calificaciones
- Blanca NievesDocumento2 páginasBlanca NievesPsicopedagogoRojoAún no hay calificaciones
- DereivadassucesiconesDocumento9 páginasDereivadassucesiconesFlor HernandezAún no hay calificaciones
- LecturasDocumento15 páginasLecturasFlor HernandezAún no hay calificaciones
- 6378 Tablperiodicaelementos 14Documento4 páginas6378 Tablperiodicaelementos 14Flor HernandezAún no hay calificaciones
- Atraidoportifulloelseñorzorro 48595959Documento3 páginasAtraidoportifulloelseñorzorro 48595959Flor HernandezAún no hay calificaciones
- 930terremoto Del Océano Índico de 2004-56Documento14 páginas930terremoto Del Océano Índico de 2004-56Flor HernandezAún no hay calificaciones
- 45cuántos Elementos Tiene La Tabla Periódica90Documento3 páginas45cuántos Elementos Tiene La Tabla Periódica90Flor HernandezAún no hay calificaciones
- Tabla Periodica543767Documento2 páginasTabla Periodica543767Flor HernandezAún no hay calificaciones
- Leamos Todos Los Dias Un Libro NuevoDocumento15 páginasLeamos Todos Los Dias Un Libro NuevoFlor HernandezAún no hay calificaciones
- Documento 54 EspañolDocumento5 páginasDocumento 54 EspañolFlor HernandezAún no hay calificaciones
- Feria CientificaDocumento22 páginasFeria CientificaNatalia Alejandra Ortiz AlfaroAún no hay calificaciones
- Los ViajerosDocumento11 páginasLos ViajerosFlor HernandezAún no hay calificaciones
- Las LecturasDocumento11 páginasLas LecturasFlor HernandezAún no hay calificaciones
- 45cuántos Elementos Tiene La Tabla Periódica90Documento3 páginas45cuántos Elementos Tiene La Tabla Periódica90Flor HernandezAún no hay calificaciones
- Hacia El Camino de La Lectura. Investigacion 54Documento11 páginasHacia El Camino de La Lectura. Investigacion 54Flor HernandezAún no hay calificaciones
- Investigamemos Los IndocumentadosDocumento11 páginasInvestigamemos Los IndocumentadosFlor HernandezAún no hay calificaciones
- Trabajo de Investigacion 2-La Vida Es MejorDocumento9 páginasTrabajo de Investigacion 2-La Vida Es MejorFlor HernandezAún no hay calificaciones
- Los ImigrantesDocumento9 páginasLos ImigrantesFlor HernandezAún no hay calificaciones
- Leamos Todos Los Dias Un Libro NuevoDocumento15 páginasLeamos Todos Los Dias Un Libro NuevoFlor HernandezAún no hay calificaciones
- Investigacionñ-Los InmigrantesDocumento9 páginasInvestigacionñ-Los InmigrantesFlor HernandezAún no hay calificaciones
- Lcin U3 Ea AnctDocumento52 páginasLcin U3 Ea Anctana cristinaAún no hay calificaciones
- Formación de martensita y perfiles de dureza en aceros templadosDocumento10 páginasFormación de martensita y perfiles de dureza en aceros templados̶M̶a̶u̶r̶i̶c̶i̶o̶ B̶e̶c̶e̶r̶r̶a̶ P̶e̶ñ̶a̶l̶o̶z̶a̶Aún no hay calificaciones
- Conservacion de La MasaDocumento5 páginasConservacion de La MasaArmando Covarrubias BalderramaAún no hay calificaciones
- Ejercicios Unidad 1Documento3 páginasEjercicios Unidad 1Sakura RaAún no hay calificaciones
- Unidad 6Documento59 páginasUnidad 6Franklin SanchezAún no hay calificaciones
- Tintura con jiggers: equipos, detalles y cuidados para igualaciónDocumento2 páginasTintura con jiggers: equipos, detalles y cuidados para igualacióne.yanez.munio751Aún no hay calificaciones
- Transformadores TaapsDocumento11 páginasTransformadores TaapsBRAYAN SALAZAR MEZAAún no hay calificaciones
- Laboratorio 15 Puente de WheatstoneDocumento16 páginasLaboratorio 15 Puente de WheatstoneCinthya MoryAún no hay calificaciones
- Especificaciones técnicas servicios higiénicosDocumento45 páginasEspecificaciones técnicas servicios higiénicosDhan AntonyAún no hay calificaciones
- Examen Final de Ecuaciones Diferenciales Ma-153: ResoluciónDocumento5 páginasExamen Final de Ecuaciones Diferenciales Ma-153: ResoluciónRomeo ShakespeareAún no hay calificaciones
- Memoria Mobiliario Urbano EntronquesDocumento21 páginasMemoria Mobiliario Urbano EntronquesIvonne HernandezAún no hay calificaciones
- 03a. Plano de Distribución de Las Calicatas, Con Las Condiciones Actuales Del Terreno.Documento1 página03a. Plano de Distribución de Las Calicatas, Con Las Condiciones Actuales Del Terreno.rafael Ancco PumaAún no hay calificaciones
- Escalares y Vectores, MRU y MRUV 2020Documento43 páginasEscalares y Vectores, MRU y MRUV 2020Diana Valeria EscobarAún no hay calificaciones
- TP1 - Transformador - Introd y Ejercicios ResueltosDocumento34 páginasTP1 - Transformador - Introd y Ejercicios ResueltosagusAún no hay calificaciones
- Guia de Laboratorio ComplexometriaDocumento6 páginasGuia de Laboratorio ComplexometriaAndres Felipe TobarAún no hay calificaciones
- Taller 3 - 16-01-2023Documento5 páginasTaller 3 - 16-01-2023Inversiones ZapataAún no hay calificaciones
- FORO de ElectroneumaticaDocumento3 páginasFORO de ElectroneumaticaJuan Elias Sanchez SeguraAún no hay calificaciones
- Manual de Rescate en AscensorDocumento104 páginasManual de Rescate en AscensorOrlando AgudeloAún no hay calificaciones
- CompactadoresDocumento14 páginasCompactadoresFabian Alberto Bernal CubidesAún no hay calificaciones
- Informe de La Legislación en Materia Del Desarrollo Sustentable en El Área Profesional Del EstudianteDocumento7 páginasInforme de La Legislación en Materia Del Desarrollo Sustentable en El Área Profesional Del EstudianteShino CapushinoAún no hay calificaciones
- Procedimiento de Trabajo de Carga y DescargaDocumento14 páginasProcedimiento de Trabajo de Carga y DescargaCamila G9nzalezAún no hay calificaciones
- MEDIDAS DE TENDENCIA CENTRAL - Datos AgrupadosDocumento16 páginasMEDIDAS DE TENDENCIA CENTRAL - Datos AgrupadosRuben Dario Mart�nez Casta�edaAún no hay calificaciones
- Anexo 2 - Formato Tarea 1 (Entrega)Documento11 páginasAnexo 2 - Formato Tarea 1 (Entrega)hola meloAún no hay calificaciones
- Problemas ALEACIONES METÁLICASDocumento17 páginasProblemas ALEACIONES METÁLICASkoko10000Aún no hay calificaciones
- EJEMPLO - 6 - LaminadoDocumento4 páginasEJEMPLO - 6 - Laminadodiego bgAún no hay calificaciones
- Tarifas para El Suministro y Venta de Energía EléctricaDocumento8 páginasTarifas para El Suministro y Venta de Energía EléctricaRicardo Rivas ZuñigaAún no hay calificaciones
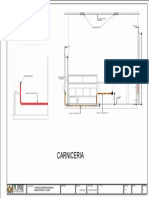
- Instalacion Electrica de Una Caseta de Mercado - 1Documento1 páginaInstalacion Electrica de Una Caseta de Mercado - 1albaroAún no hay calificaciones
- Smbolos Del Contactor y PracticaDocumento22 páginasSmbolos Del Contactor y PracticaJuan Carlos Ortiz100% (1)
- ElasticidadDocumento15 páginasElasticidadEsteban FajardoAún no hay calificaciones
- Essa - 581761Documento2 páginasEssa - 581761David MurallaAún no hay calificaciones