0% encontró este documento útil (0 votos)
237 vistas5 páginasObservador Orden Minimo MATLAB
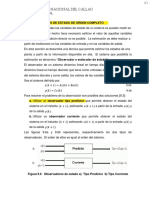
Este documento describe el diseño de un observador de orden mínimo para sistemas donde solo algunas variables de estado son medibles. Explica que el proceso es similar al observador de orden completo, pero solo estima las variables no medibles. Muestra los pasos para diseñar el observador, incluyendo verificar la observabilidad, calcular la ganancia del observador usando sustitución o transformación de Ackermann, y simular el observador en Simulink para verificar su convergencia.
Cargado por
Diego Rodrigo Caballero PalaciosDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
237 vistas5 páginasObservador Orden Minimo MATLAB
Este documento describe el diseño de un observador de orden mínimo para sistemas donde solo algunas variables de estado son medibles. Explica que el proceso es similar al observador de orden completo, pero solo estima las variables no medibles. Muestra los pasos para diseñar el observador, incluyendo verificar la observabilidad, calcular la ganancia del observador usando sustitución o transformación de Ackermann, y simular el observador en Simulink para verificar su convergencia.
Cargado por
Diego Rodrigo Caballero PalaciosDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd