También podría gustarte
- Cinematica Naval RadarDocumento5 páginasCinematica Naval RadarRoberto VasquezAún no hay calificaciones
- Ej Cinematica NavalDocumento17 páginasEj Cinematica NavalEnla Mira Tetengo100% (1)
- Ej Cinematica NavalDocumento14 páginasEj Cinematica NavalLuis Alberto González Salgado100% (2)
- Cinemã Tica Nã UticaDocumento5 páginasCinemã Tica Nã UticaPablo Ramírez SáenzAún no hay calificaciones
- 7.01 Cinematica MaritimaDocumento20 páginas7.01 Cinematica MaritimaPere David100% (1)
- Cinemática náuticaDocumento10 páginasCinemática náuticaAriel Aguirre 15173645Aún no hay calificaciones
- Cinemática NáuticaDocumento29 páginasCinemática NáuticaHéctor Gerson Oliva UlloaAún no hay calificaciones
- Concepto CinematicaDocumento36 páginasConcepto CinematicaJon FernandezAún no hay calificaciones
- Cinemática NáuticaDocumento29 páginasCinemática Náuticaricardote24100% (4)
- Cinematica Busqueda y ExploracionDocumento51 páginasCinematica Busqueda y ExploracionPablo Villanueva ZapataAún no hay calificaciones
- ApuntesnavegacionDocumento16 páginasApuntesnavegacionSergio CarballoAún no hay calificaciones
- Escuela Naval MilitarDocumento24 páginasEscuela Naval MilitarChristian Vasquez Kamikihara50% (2)
- CorrienteDocumento6 páginasCorrienteAlberto Riobo IglesiasAún no hay calificaciones
- Tarea ArregladaDocumento4 páginasTarea ArregladaDaniieLaa MartiinaaAún no hay calificaciones
- Título de Navegación CosteraDocumento9 páginasTítulo de Navegación CosteraGabriel CalzadaAún no hay calificaciones
- Navegación MarítimaDocumento5 páginasNavegación MarítimaEric GarciaAún no hay calificaciones
- Clase Obras PortuariasDocumento201 páginasClase Obras PortuariasOswaldo GalvezAún no hay calificaciones
- Navegacion Clase SeparataDocumento8 páginasNavegacion Clase SeparatarocioAún no hay calificaciones
- Cinemática NavalDocumento13 páginasCinemática NavalHadrián González GrañaAún no hay calificaciones
- G1FG - Introduccíon FísicaDocumento2 páginasG1FG - Introduccíon FísicahelenAún no hay calificaciones
- 2.06 Navegacion Estima Gráfica 2019Documento8 páginas2.06 Navegacion Estima Gráfica 2019AntonioAún no hay calificaciones
- Compás náuticaDocumento8 páginasCompás náuticaDayana ArisacaAún no hay calificaciones
- Navegación: problemas y soluciones básicasDocumento39 páginasNavegación: problemas y soluciones básicasTecno Herreria Tandil100% (1)
- Navegación marítima: métodos y conceptos claveDocumento5 páginasNavegación marítima: métodos y conceptos claveYeison Cesar MonzonAún no hay calificaciones
- Cinematic A 1Documento8 páginasCinematic A 1joaquinAún no hay calificaciones
- Unidad 11 Carta de NavegacionDocumento22 páginasUnidad 11 Carta de NavegacionManolito GafotasAún no hay calificaciones
- Maniobra de Cambio de Rumbo Del BuqueDocumento12 páginasManiobra de Cambio de Rumbo Del Buquealonso_rAún no hay calificaciones
- Cinematica Naval Ejercicios ResueltosDocumento2 páginasCinematica Naval Ejercicios ResueltosmjyanezcorderoAún no hay calificaciones
- Carta de NavegaciónDocumento22 páginasCarta de NavegaciónArturoAún no hay calificaciones
- Cinematica Tactica Pub423Documento155 páginasCinematica Tactica Pub423Eduardo Bernal AlvarezAún no hay calificaciones
- Navegacion MaritimaDocumento10 páginasNavegacion MaritimagiovanaAún no hay calificaciones
- Rumbos CorrienteDocumento10 páginasRumbos CorrienteAday Falcones britoAún no hay calificaciones
- BladimirDocumento9 páginasBladimirJorge TugriAún no hay calificaciones
- Anggy-La Tierra en La AviacionDocumento7 páginasAnggy-La Tierra en La AviacionMARIA J RODRIGUEZAún no hay calificaciones
- Teoría Cir Maniobra-1Documento2 páginasTeoría Cir Maniobra-1daniel PetersenAún no hay calificaciones
- Andalucia Py Naveg Resueltos Adncy NavegaDocumento20 páginasAndalucia Py Naveg Resueltos Adncy NavegaPedro EscalanoAún no hay calificaciones
- Examen Complemento Navegcion Patrones 2018Documento4 páginasExamen Complemento Navegcion Patrones 2018rafaelAún no hay calificaciones
- Cinematic ADocumento15 páginasCinematic AElias Isaias Tarrillo Portilla0% (1)
- Demora y MarcaciónDocumento12 páginasDemora y MarcaciónRoberto Fusil SanzonettiAún no hay calificaciones
- Guia de TransformadasDocumento4 páginasGuia de TransformadasAndres AldayAún no hay calificaciones
- Loxodromica PDFDocumento12 páginasLoxodromica PDFGuiosmel ArzolaAún no hay calificaciones
- Medir distancias en navegación con sextante, corredera, taxímetro y radarDocumento4 páginasMedir distancias en navegación con sextante, corredera, taxímetro y radarfabioAún no hay calificaciones
- Compas Magnetico GreiskaDocumento10 páginasCompas Magnetico GreiskaReinoso GreiskaAún no hay calificaciones
- EL RADAR y CINEMATICA PDFDocumento12 páginasEL RADAR y CINEMATICA PDFMaikel RamosAún no hay calificaciones
- Exámenes Patrón de YateDocumento116 páginasExámenes Patrón de Yatemiguel leon100% (1)
- CINEMÁTICADocumento3 páginasCINEMÁTICAMarina Vidueira FranjoAún no hay calificaciones
- Estimación analíticaDocumento15 páginasEstimación analíticaAriel Aguirre 15173645Aún no hay calificaciones
- Rumboy Carta NauticaDocumento6 páginasRumboy Carta NauticamanologilAún no hay calificaciones
- Practica Fisica EDocumento7 páginasPractica Fisica Egisel choqueAún no hay calificaciones
- Calculo Del DesplazamientoDocumento10 páginasCalculo Del DesplazamientoŎЯĿãńđŌ Ҝ-бяèŗáAún no hay calificaciones
- Cinemática naval: Cálculo de velocidad relativa entre barcosDocumento6 páginasCinemática naval: Cálculo de velocidad relativa entre barcoshilda sofia farias lezamaAún no hay calificaciones
- ExamsDocumento24 páginasExamsdetbridAún no hay calificaciones
- Mis subidas en bicicleta: 168 altimetrías de España, Italia, Francia, Andorra y PortugalDe EverandMis subidas en bicicleta: 168 altimetrías de España, Italia, Francia, Andorra y PortugalAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Santander-Bretaña-Santander en el Corto Maltés, un velero de 6 metrosDe EverandSantander-Bretaña-Santander en el Corto Maltés, un velero de 6 metrosAún no hay calificaciones
- Listado Facturas J403089124Documento3 páginasListado Facturas J403089124ena camargoAún no hay calificaciones
- Listado Facturas J403089124Documento3 páginasListado Facturas J403089124ena camargoAún no hay calificaciones
- Listado Facturas J316713091Documento3 páginasListado Facturas J316713091ena camargoAún no hay calificaciones
- Listado Facturas J316713091Documento3 páginasListado Facturas J316713091ena camargoAún no hay calificaciones
- Listado Facturas J403089124Documento3 páginasListado Facturas J403089124ena camargoAún no hay calificaciones
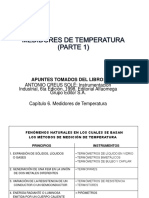
- Tema 6. Med. Temperatura - Parte 1Documento40 páginasTema 6. Med. Temperatura - Parte 1ena camargoAún no hay calificaciones
- Listado Facturas J403089124Documento3 páginasListado Facturas J403089124ena camargoAún no hay calificaciones
- RIF FM 107 Lamega Nov2023 Nov2025Documento1 páginaRIF FM 107 Lamega Nov2023 Nov2025ena camargoAún no hay calificaciones
- Planilla Nuevo R-LCDocumento1 páginaPlanilla Nuevo R-LCDaniela LopezAún no hay calificaciones
- P-4 - Ctos RC y RLC en Regimen TransitorioDocumento14 páginasP-4 - Ctos RC y RLC en Regimen Transitorioena camargoAún no hay calificaciones
- Listado Facturas J401047670Documento2 páginasListado Facturas J401047670ena camargoAún no hay calificaciones
- Listado Facturas J501576440Documento2 páginasListado Facturas J501576440ena camargoAún no hay calificaciones
- Analisis de Pago DesbloqueoDocumento2 páginasAnalisis de Pago Desbloqueoena camargoAún no hay calificaciones
- Listado Facturas J402117728Documento3 páginasListado Facturas J402117728ena camargoAún no hay calificaciones
- Listado Proformas J501576440Documento3 páginasListado Proformas J501576440ena camargoAún no hay calificaciones
- Listado Proformas J407894919Documento3 páginasListado Proformas J407894919ena camargoAún no hay calificaciones
- Alisado de FormasDocumento5 páginasAlisado de FormasRafael Andrade CortegosoAún no hay calificaciones
- Tarea Virtual 3 Ley de Transito LicenciaDocumento4 páginasTarea Virtual 3 Ley de Transito LicenciaIchigo AlejandroAún no hay calificaciones
- Test de AlzheimerDocumento10 páginasTest de Alzheimerapi-3722552100% (1)
- Diseño Preliminar de Un Buque Restaurante para La Navegación FluvialDocumento178 páginasDiseño Preliminar de Un Buque Restaurante para La Navegación FluvialLino FernandezAún no hay calificaciones
- Sistemas de Bombeo PDFDocumento9 páginasSistemas de Bombeo PDFReywill PiñangoAún no hay calificaciones
- PETS-BHP-004-Construcción de Pozas Auxiliares y Enmallado de PlataformasDocumento8 páginasPETS-BHP-004-Construcción de Pozas Auxiliares y Enmallado de PlataformasCLINTON BRAULIOAún no hay calificaciones
- Oferta de Bienes AdjudicadosDocumento18 páginasOferta de Bienes AdjudicadosJhonatan Josué Portugal RamírezAún no hay calificaciones
- Secuencia Logica - Obras PrliminaresDocumento22 páginasSecuencia Logica - Obras PrliminaresPamela Paola Taype Huamani100% (1)
- Informe 04Documento19 páginasInforme 04Fabian De La Cruz CastroAún no hay calificaciones
- Proceso logístico en el transporte de mercancías (39Documento1 páginaProceso logístico en el transporte de mercancías (39juan sebastian arango lopezAún no hay calificaciones
- Funcionamiento Válvula Escalonada GiroDocumento7 páginasFuncionamiento Válvula Escalonada GiroHéctorHernándezDíazAún no hay calificaciones
- Apurimac: Repositorio Institucional - UNAMBA - PERÚDocumento200 páginasApurimac: Repositorio Institucional - UNAMBA - PERÚMiguel BermudezAún no hay calificaciones
- Seguro para Operadores de AeropuertosDocumento3 páginasSeguro para Operadores de Aeropuertosmiguel mondragonAún no hay calificaciones
- Procedimiento de EnfierraduraDocumento10 páginasProcedimiento de EnfierraduraRodrigo Escobar ZambranoAún no hay calificaciones
- Antipoda de Neiva - Karen RamirezDocumento2 páginasAntipoda de Neiva - Karen RamirezSofya Ramirez0% (1)
- Rab 109Documento42 páginasRab 109Marcelo Plada GrassoAún no hay calificaciones
- Valtimor Centro CulturalDocumento1 páginaValtimor Centro Culturalleonardo corderoAún no hay calificaciones
- Caterpillar Ferreyros Truck 797f Course Training OperationDocumento20 páginasCaterpillar Ferreyros Truck 797f Course Training Operationrobyn100% (48)
- Comercio Internacional Actividad 4Documento11 páginasComercio Internacional Actividad 4JulianaLizardoAún no hay calificaciones
- Permiso B0X756 PDFDocumento1 páginaPermiso B0X756 PDFedwinAún no hay calificaciones
- Problemario Admon. OperacionesDocumento37 páginasProblemario Admon. OperacionesRosy Aguilar91% (11)
- TRANSPORTEDocumento3 páginasTRANSPORTEJuan Daniel0% (1)
- Makro Cadena SuministroDocumento14 páginasMakro Cadena SuministroJerson Jose Garcia Trebejo0% (1)
- Caso Vinos UruguayDocumento2 páginasCaso Vinos UruguaySara OyarceAún no hay calificaciones
- Mapeo Territorial Del Frente de Taxistas Del Edo Vargas 21 de OctubrethDocumento27 páginasMapeo Territorial Del Frente de Taxistas Del Edo Vargas 21 de OctubrethÀbřåhàm ĎèâŕAún no hay calificaciones
- Jardines iniciales Azángaro PunoDocumento11 páginasJardines iniciales Azángaro Punoᒙᘢᗩᘗ ᔜᓵᒸᐻᕱ100% (1)
- Desde Los Tiempos de La Colonia Fue Clave para La Naciente VillaDocumento5 páginasDesde Los Tiempos de La Colonia Fue Clave para La Naciente VillaAlejandra MartinezAún no hay calificaciones
- 1064 POSCO Carta ProveedorDocumento2 páginas1064 POSCO Carta ProveedorCarlos Alberto Zarate ReynosoAún no hay calificaciones
- Agrimac Dw20-EsDocumento2 páginasAgrimac Dw20-Estomy112Aún no hay calificaciones
- CASO N°3 ChryslerDocumento15 páginasCASO N°3 ChryslerMichelleArleneMartinez100% (1)