También podría gustarte
- Informe de Plan de Mitigacion Ambiental en ObraDocumento3 páginasInforme de Plan de Mitigacion Ambiental en Obramareleo121100% (1)
- Gate Pass - 50082185Documento1 páginaGate Pass - 50082185Trans de la chica mengibarAún no hay calificaciones
- Uso Práctico Del Emisor y Del Receptor de Ondas EscalaresDocumento6 páginasUso Práctico Del Emisor y Del Receptor de Ondas EscalaresTeslamem100% (5)
- Reporte de Práctica 2,3 Fotodiodo y FototransistorDocumento12 páginasReporte de Práctica 2,3 Fotodiodo y FototransistorLuis Eduardo Martinez RamosAún no hay calificaciones
- Sistemas Funcionales de NegocioDocumento5 páginasSistemas Funcionales de NegocioCristina PerezAún no hay calificaciones
- Sistema de ArranqueDocumento11 páginasSistema de ArranqueRenatto Miguel RG100% (1)
- Determinación de Los Parámetros de Funcionamiento de Los Equipos de Adquisición de ImágenesDocumento21 páginasDeterminación de Los Parámetros de Funcionamiento de Los Equipos de Adquisición de ImágenesGabriel Chueca TobesAún no hay calificaciones
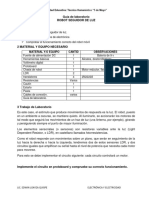
- Ficha 03: Mini Robot Seguidor de Luz: LDR / Fotocelda / FotocélulaDocumento3 páginasFicha 03: Mini Robot Seguidor de Luz: LDR / Fotocelda / Fotocélulajosephpanihuara082 panihuaraAún no hay calificaciones
- Calula SolarDocumento5 páginasCalula Solarmroberto.hkAún no hay calificaciones
- Informe Luz Nocturna AutomaticamenteDocumento3 páginasInforme Luz Nocturna AutomaticamenteCarol VenturaAún no hay calificaciones
- Practica 2 TCRDocumento11 páginasPractica 2 TCRanaaluma282Aún no hay calificaciones
- L-Robot Seguidor de Luz - 112215Documento3 páginasL-Robot Seguidor de Luz - 112215applefirt349Aún no hay calificaciones
- Prcatica 3 Inversor Emisor ComunDocumento4 páginasPrcatica 3 Inversor Emisor ComunALEX ARROYOAún no hay calificaciones
- 1.11 LámparasDocumento17 páginas1.11 LámparasAdrian MartulewiczAún no hay calificaciones
- Alarma LaserDocumento5 páginasAlarma Laserandy dolorierAún no hay calificaciones
- Tad Vanessa MorcilloDocumento60 páginasTad Vanessa MorcilloMónica Gómez IncioAún no hay calificaciones
- Circuito Interruptor Crepuscular Gomez 1729.Documento7 páginasCircuito Interruptor Crepuscular Gomez 1729.Jonxthxn GómezAún no hay calificaciones
- Tecnologico Nacional de Mexico Instituto Tecnologico de TlalnepantlaDocumento6 páginasTecnologico Nacional de Mexico Instituto Tecnologico de TlalnepantlaJonathan VázquezAún no hay calificaciones
- Gustavo Patiño ValoresDocumento6 páginasGustavo Patiño ValoresCamilo HernandezAún no hay calificaciones
- Proyecto de Foto Celda SencilloDocumento7 páginasProyecto de Foto Celda SencillofguevaraperaltaAún no hay calificaciones
- Reporte de Investigación Tema IIDocumento21 páginasReporte de Investigación Tema IIjorge ruizAún no hay calificaciones
- Act 5 AndresMartinezBacaDocumento9 páginasAct 5 AndresMartinezBacaAndres MartinezAún no hay calificaciones
- Elevision de Tubo de Rayos Catodicos y Television LCDDocumento9 páginasElevision de Tubo de Rayos Catodicos y Television LCDmaurice0% (1)
- Control de Luces de JardinDocumento4 páginasControl de Luces de JardinFeer Moreno LopezAún no hay calificaciones
- Practica AnalogicaDocumento3 páginasPractica AnalogicaNahum olaf Soto GodinezAún no hay calificaciones
- T2. Instrumentación y Equipos Técnicos en MNDocumento7 páginasT2. Instrumentación y Equipos Técnicos en MNAndrea Hernández MateoAún no hay calificaciones
- Diodo Rectificador de Media Onda y Onda CompletaDocumento9 páginasDiodo Rectificador de Media Onda y Onda Completaoscar juarezAún no hay calificaciones
- Telerruptor - AccionamientosDocumento7 páginasTelerruptor - AccionamientosJonathan LuqueAún no hay calificaciones
- Laboratorio Nro. 2 - Simulacion y Recreacion de Un Transistor Como Amplificador.Documento2 páginasLaboratorio Nro. 2 - Simulacion y Recreacion de Un Transistor Como Amplificador.Alexander Mamani OrtizAún no hay calificaciones
- Practica 4 Efecto FotoelectricoDocumento5 páginasPractica 4 Efecto FotoelectricoCesar CastillogonzalezAún no hay calificaciones
- Practica 3 Luz de Posicion y EmergenciaDocumento6 páginasPractica 3 Luz de Posicion y Emergenciaandrestd94Aún no hay calificaciones
- Fisica 3Documento18 páginasFisica 3Julio RAún no hay calificaciones
- Solucionario Mecánica de Fluidos Merle C. Potter, David C. Wiggert 3edDocumento8 páginasSolucionario Mecánica de Fluidos Merle C. Potter, David C. Wiggert 3edJOSE CARLOS0% (5)
- ElectroquimioluminiscenciaDocumento1 páginaElectroquimioluminiscenciamonicaAún no hay calificaciones
- Fase 3 - Resonancia MagnéticaDocumento19 páginasFase 3 - Resonancia MagnéticaJohana Mendoza (Barbie's house)Aún no hay calificaciones
- ElectroquimioluminiscenciaDocumento1 páginaElectroquimioluminiscenciamonicaAún no hay calificaciones
- Proyecto de Transferencia de CalorDocumento4 páginasProyecto de Transferencia de CalorDaniel Andres Reyes LunaAún no hay calificaciones
- Acelerador de PartículasDocumento7 páginasAcelerador de PartículasLucho MontañezAún no hay calificaciones
- InformeDocumento21 páginasInformeAngel GutierrezAún no hay calificaciones
- Detectores de CentelleoDocumento10 páginasDetectores de CentelleoJhon FisicoAún no hay calificaciones
- Fase 3-154018 - 13Documento15 páginasFase 3-154018 - 13Liced Yazmin Ortiz RuizAún no hay calificaciones
- SensorDocumento3 páginasSensormilaAún no hay calificaciones
- Detectores SemiconductoresDocumento17 páginasDetectores SemiconductoresMiguel Bustamante100% (1)
- Practica 1 RadiadoresDocumento22 páginasPractica 1 RadiadoresLourdes CastroAún no hay calificaciones
- Lampara TDP PDFDocumento2 páginasLampara TDP PDFinfoespaizencomAún no hay calificaciones
- Deber 1Documento2 páginasDeber 1roberto coello morenoAún no hay calificaciones
- CIRCUITOSDocumento4 páginasCIRCUITOSEdy Yair Cruz StgoAún no hay calificaciones
- T4 Aplicacion para Obtener Imagenes Radiologicas DentalesDocumento8 páginasT4 Aplicacion para Obtener Imagenes Radiologicas DentalesNIKOLE DESIRE RODRÍGUEZ CHUQUIRIMAAún no hay calificaciones
- Energia FotovoltaicaDocumento18 páginasEnergia FotovoltaicaDaniel Ubaldo JustoAún no hay calificaciones
- 01 U1 - Tema #1 - Rev0 - Naturaleza de La LuzDocumento36 páginas01 U1 - Tema #1 - Rev0 - Naturaleza de La LuzJuan PineyroAún no hay calificaciones
- Ley Del Cuadrado InversoDocumento9 páginasLey Del Cuadrado Inversoestefania bressanAún no hay calificaciones
- Motor Fotoresistencia.Documento5 páginasMotor Fotoresistencia.Fabiola S. PinedaAún no hay calificaciones
- Sesion 16 - Espectro de Resonacia Magnetica NuclearDocumento13 páginasSesion 16 - Espectro de Resonacia Magnetica NuclearJesseniaGilAún no hay calificaciones
- 2do Reporte BrujulaDocumento4 páginas2do Reporte Brujulabigircus88Aún no hay calificaciones
- Caracterización de Una Celda Solar PolicristalinaDocumento4 páginasCaracterización de Una Celda Solar PolicristalinaJUAN CAMILO BERMUDEZ BETANCOURTAún no hay calificaciones
- Espectroscopia InfrarrojaDocumento41 páginasEspectroscopia InfrarrojaAriosha Ibarrola100% (1)
- ElectroDocumento66 páginasElectroRodrigo SoriaAún no hay calificaciones
- Wa0001.Documento8 páginasWa0001.CARLOS DANIEL LOPEZ ATILANOAún no hay calificaciones
- Espectroscopia InfrarrojaDocumento58 páginasEspectroscopia InfrarrojaLeandra Montes100% (1)
- Informe Final ElectrónicaDocumento7 páginasInforme Final ElectrónicaChristian Ramiro Jácome SambacheAún no hay calificaciones
- Robot Seguidor de Luz RobóticaDocumento9 páginasRobot Seguidor de Luz RobóticaLeonardo GonzálezAún no hay calificaciones
- APE 3 Efecto Fotoel CtricoDocumento4 páginasAPE 3 Efecto Fotoel CtricoJohnny SuárezAún no hay calificaciones
- Los Seres Vivos Dependen De La Mecánica CuánticaDe EverandLos Seres Vivos Dependen De La Mecánica CuánticaAún no hay calificaciones
- Qué Debe Enseñar La Escuela BásicaDocumento5 páginasQué Debe Enseñar La Escuela BásicaSusanitta VebaAún no hay calificaciones
- Actividad Final VibracionesDocumento8 páginasActividad Final VibracionesLeinad RialdaAún no hay calificaciones
- Consorcio Del Tren ElectricoDocumento5 páginasConsorcio Del Tren ElectricoTomas Moises Aparicio AparicioAún no hay calificaciones
- Lineamientos para La Organización y El Funcionamiento de Los Consejos Técnicos Escolares de Educación BásicaDocumento2 páginasLineamientos para La Organización y El Funcionamiento de Los Consejos Técnicos Escolares de Educación BásicaBrenda GarciaAún no hay calificaciones
- Control Del Plan de MarketingDocumento11 páginasControl Del Plan de MarketingG.a. PriscilaAún no hay calificaciones
- Paso 4 Diseño de RrellenosDocumento3 páginasPaso 4 Diseño de RrellenosLida SambOniAún no hay calificaciones
- Prácticas Culturales y Agronómicas para El Manejo y Conservación Del Suelo, 2018Documento15 páginasPrácticas Culturales y Agronómicas para El Manejo y Conservación Del Suelo, 2018Dan Pinzón-Gómez0% (2)
- San CristóbalDocumento3 páginasSan CristóbalvictorAún no hay calificaciones
- Integradora Quimica Fisica LenguaDocumento6 páginasIntegradora Quimica Fisica LenguaAmparo SosaAún no hay calificaciones
- Original: Municipalidad de San Pedro SulaDocumento2 páginasOriginal: Municipalidad de San Pedro SulaJosue GpAún no hay calificaciones
- Rectificadores Trifásicos IEEEDocumento4 páginasRectificadores Trifásicos IEEECarlos Molina100% (1)
- Adecentamiento Juan MontalvoDocumento38 páginasAdecentamiento Juan MontalvoMarje AnchundiaAún no hay calificaciones
- Ficha Técnica de Bienes de Interés CulturalDocumento8 páginasFicha Técnica de Bienes de Interés CulturalJHON NICOLAS RODRIGUEZ VENEGASAún no hay calificaciones
- Normas Iec - ListaDocumento9 páginasNormas Iec - Listaadrian-leonardo19750% (1)
- Tesis Zoila RuizDocumento191 páginasTesis Zoila RuizNorman De La QuintanaAún no hay calificaciones
- Tesis SEL 421Documento174 páginasTesis SEL 421virijaz100% (2)
- Fallas de PatologiaDocumento31 páginasFallas de PatologiaALEXAún no hay calificaciones
- HMX Puertas17Documento40 páginasHMX Puertas17Fer LúaAún no hay calificaciones
- Informe de Tanque Septico PDFDocumento25 páginasInforme de Tanque Septico PDFĐannyUnasam100% (1)
- 13.1ensayo Triaxial (Uu, CD, Cu)Documento1 página13.1ensayo Triaxial (Uu, CD, Cu)Christian David BarraganAún no hay calificaciones
- Guia de Buenas Practicas en Seguridad VialDocumento44 páginasGuia de Buenas Practicas en Seguridad VialCAROL DIAZ100% (1)
- Relaciones Humanas Manejo de ConflictosDocumento4 páginasRelaciones Humanas Manejo de ConflictosWalter RamírezAún no hay calificaciones
- Ordenamiento Territorial de La Region de CuscoDocumento123 páginasOrdenamiento Territorial de La Region de CuscoDavid Espinoza100% (1)
- Curso de TPMDocumento76 páginasCurso de TPMEdgar Dueñas Gallegos100% (3)
- Practica 12Documento13 páginasPractica 12Jesús Francisco Vidaňa DuronAún no hay calificaciones
- Bases para Concurso de Ambientación de AulaDocumento3 páginasBases para Concurso de Ambientación de AulaMariela Ponce Rodas78% (9)