FACULTAD
DE CIENCIAS
E INGENIERIA
Codigo del stumno
4043 5443
Nombre y Apellides dat alumna -
Vs! Kvir Marae lira
der EXAMEN DE
—Hecet Coil ioe
Clave del curso Nombre del curso
Firma del alur
|
| Nota
ymibre y Apellidos d
a hye
ADVERTENCIAS
+ Antes de iniciar e! examen, el alumno dabe completar los datos solicitados en esta caratvia
+ Utiice las zona sefialadas del cuadernilo para presentar su trabajo en limpio.
+ La presentacién. la ortogralia y la gramatica influiran en la calficacion
+ Todo el material de desarrollo del examen debe ser inciuido en este cuaderniio.
+ Solo podré utilizar ef material indicado expresamente en el toma de evaluacr’y’
+ Prohibido uso de celulares y calculadoras con camara fotogrética,
FCI-Adm-4.01
PONTIFICIA UNIVERSIDAD CATOLICA DEL PERU
FACULTAD DE CIENCIAS E INGENIERIA
MEC284 ~ CONTROL AUTOMATICO
Examen 1
(Segundo semestre 2022)
Indicaciones generales:
© Duracién: 3 horas,
© Materiales o equipos a utilizar: Sin apuntes de clase y calculadora no programable.
«No esta permitido el uso de ningiin material 0 equipo electrénico adicional al indicado.
* La presentacién, la ortografia y la gramatica influirdn en la califica
Puntaje total: 20 puntos
Cuestionario:
Prequnta 4 (6 puntos)
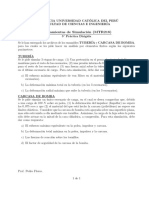
La Figura 1 muestra un proceso de control de nivel del tanque a partir de un voltaje de entrada
Vig, donde el flujo de entrada se encuentra regulado por una valvula proporcional cuya
apertura es proporcional a la corriente que pasa por su resistencia interna. En la parte
superior del tanque se cuenta con un sensor de nivel, el cual genera un voltaje ¥,
proporcional al cuadrado del nivel riedido h. Considere la siguiente relacién para el caudal
de salida del tanque: ~
h
| Aout
Figura 1: diagrama del proceso
El diagrama de bloques de este proceso se puede modelar como se muestra en la Figura 2,
donde G, tiene como variable de salida la corriente que pasa por la valvula proporcional.
Pagina 1 de 3
Gk
seat 7
Figura 2: diagrama de bloques del proceso
Se pide:
a) Identificar las variables x; de acuerdo con el proceso analizado (1 punto)
) Encontrar las ecuaciones diferenciales linealizadas que relacionan estas variables.
Utilice como punto de operacién h = hp. (2 puntos)
c) Determine las funciones de transferencia 6). (2 puntos)
d) Determine la funcién de transferencia resultante del sistema. (1 punto)
Prequnta 2 (7 puntos)
El sistema que se muestra en la Figura 3 es un sistema de control de realimentacion
unitaria con un lazo de realimentacién menor.
RO) + WEG) +
Figura 3: Sistema de control de retroalimentacién unitaria
‘con un bucle de retroalimentacién menor
a) En ausencia del lazo de realimentacién menor a = 0, determine el sobreimpulso
maximo M, del sistema a la entrada de escalén unitario y el error de estado
estacionario e,, que resulta de una entrada de rampa unitaria. (2 puntos)
b) Determine la constante a que disminuir el sobreimpulso maximo del sistema a la
‘entrada escalén unitario a 1.5%. {Cudl es el error en estado estacionario para la
entrada de rampa unitaria con este valor de a? (2.5 puntos)
©) Mediante Ia implementacién de un controlador proporcional como se muestra en la
Figura 4, el error de estado estacionario a la entrada rampa unitaria se puede reducir
‘al mismo nivel que en el inciso a). Determine el valor deyK, que hace esto posible.
Calcule adicionalmente el sobreimpulso del sistema a la entrada de escalén unitario
luego de implementar el controlador. {Este aumenta o disminuye? (2.5 puntos)
Ada fe hey
Pagina 2 de 3
¥(s)
Figura 4: Sistema de control con controlador proporcional K,
Prequnta 3 (7 puntos)
Una empresa de robética se encuentra fabricando un nuevo modelo de servomotor que sera
usado en robots humanoides de asistencia social, los cuales ayudardn a personas de
avanzada edad a levantarse de sus camas o sillas de rueda. Debido a la falta de especialistas
en ingenieria de control en la empresa, el equipo técnico se ha contactado con usted con el
fin de solicitar sus servicios. La empresa desea que disefie el controlador de posicién para
este servomotor. La entrada de referencia se puede modelar como un escalén (asuma
unitario) que iria desde una posicién angular inicial hasta una posicién angular deseada.
El modelamiento del servomotor en lazo abierto esté dado por la funcién de transferencia
sayz La empresa requiere que el servomotor responda rapido, brinde un error nulo en estado
estacionario y tenga un sobreimpulso maximo de 15%. Considere que la respuesta rapida
que se necesita debe estar entre 1.5 y 2.5 segundos (asuma criterio de 2%).
a) Determine cual es el controlador PID més sencillo para lograr lo solicitado por la
empresa. Como el equipo técnico revisara su informe, debe justificar su eleccién
(2.5 puntos)
b) Determine los parémetros del controlador seleccionadb. (2.5 puntos)
EI equipo técnico ha evaluado el disefio de su controlador y estan satisfechos con los
resultados. Sin embargo, la gerencia de la empresa ha ordenado que los servomotores
tengan una respuesta menor a 1 segundo. Esto se debe a que también usaran estos
servomotores en robots para automatizacién de lineas de ensamblaje. Como el equipo
técnico necesita una solucién répida, no se le pide redisefiar el controlador, sino evaluar si
agregando un polo o un cero a este se podra alcanzar el nuevo requerimiento
©) Teniendo como referencia el controlador que disefié, determine aproximadamente el
rango de valores que deberia tener el polo o cero para reducir el tiempo de respuesta
de acuerdo con lo solicitado. Justifique su respuesta. (1 punto)
) Tomando en cuenta la aplicacién inicial planteada. ,Qué recomendaciones o
sugerencias daria usted al equipo técnico o gerencia sobre los requerimientos
solicitados para el controlador y el cambio pedido? (1 punto)
Los profesores del curso: Jose Garcia
Dante Arroyo
Wvan Yupanqui
San Miguel, 11 de octubre de 2022
Pagina 3 de 3
Zona exclusiva pare | 4) (6) -
calculos y desarrollos
(borrador)
Ag Ntlde pete? Vin
Hy. holtds . allt gur ace obey pli A ~pelleey
Xa) Modal dr Blow, — V5 rune ck iyi
wld
ie Prepsdodeds nba. Seok at it,
2
vila.
(4) /
Yin aids V Vv
Vin = Yt Ry +15
Vin ld + Ay THN,
“alt
Vas 2d tT
Unig = AER
OM5 = LT Lepee G oe
Ubplsl- Vets) = ATS + RT
VA
(Te Ts rshee
E « &(ks 4h)
Eis
TSeR \
Dien ie al te
Vag ort
59)
me
Yin - qd eV
y ;
Gre Kv ht
Vs At N
@ \
A telinin sev oomdie ha T Je4 V wma hI
alone tobtres qua OL gin ots Xx fpuprsueel ol droll?
Jodsling-tmo- nH
XH - Khe RT
“ZH Kin-Kz0 eieth a
dg H
te Sy belied
ah Oh Hak 4 th - Ih <0
Lye Tho
dy.
5 aaa Wak A -Thszo
hy fl. rial - Ah,
pore opiedih “AE -(B th) Hea
tert
ie A
“er
opt ae gl i
Ye ote pragadell al (2)
Vs oW =i
Zona exclusiva para
cdlculos y desarrollos
(borrador)
aR)
Zona exclusiva para h
calculos y desarrollos Wedpropadrd oe Ve a/b
prope Vs (4)
(borrador)
Ve-We Ae
tA) Lieb yet he te”
We W-h'c0 ch
PE Cbs KU Yer doped
deo
BM pacha
de. edhe Walk -2h, shso
et (hgh ‘S,
ALN Vels) - 2dg Ats)20
Tat ate
Lipa /
Pipa hulle
G, be
d H hee,
aes
a3 7
we t 2 rf
Q hoy sé
E654 6)
Rheek FTL GS
a6 kc 46GB: .
Re h( eee
(ai) ks t ASLR [ai 73s)
. Vis(s) tis yf oho
als, ty)
ec} al qw
a by
Hep OF ssh 7505
Mm: 463 %V 3. 0,363
@
mele. Benger
“ie
EnE py My Ex ®
OE Gye Lh
ear Cops Os
&
a Po ry
"Te 7 Es Ro
|| Seis! | | sepseae
asd , | SHS
Gia-bL4 4 se 2) | 50 Saas.
|i] | S4usp ts
iN 1
Sty
- | Soe se
Ory v
OLR ~
Gy
as
Qe
(borrador)
Jute
Zona exclusiva para
calculos y desarrollos
(borrador)
ct
~ piorgl
YW 4cets 208.4
[ &2 2s WH
aig yo
ay 4
S : Res
eaRY ge (EC StT)SR
evry é af
iad xr ;
: Lita | |
SPHYSHIEAS LE
446
SHS CRS 5 HS MEAS
oded obbvee de bok
Ces eG apd SO ay S -SttsHileds) 3S
et Sto SHsiMa Ste 5?
35
[ese ® seqes6 oss |
apa s Bi AG OASS +46 v
~ dad. ont,
Presente aqui su trabajo
Rey 1 Ev
fz Xs)
ew Pye propel!
Ea Ry Bt hr)P
>
Hee yce Kyo g
so "ik
4 * us ath.J
D Aber
te
bt ieke
SSH S| ada,
be Re,
Sih Bdeert pi
ot f
1G SP SF (7 1645)
Oy SOY SERS
ale
Js
eet Seo Sigy 2 &
@ SE Ystseh — 48 Ka
Y 7) teal
Mey bg 4b Ka
fey Fe 576,95 4 LEK”
Werle ra dala dl by,
28 quod come Maghye pad
emule | “% tet he
pe
I
be Va" Besa
ggty
elie
Zona exclusiva para
calculos y desarrollos
(borrador)
FCI
zona exclusiva para
culos y desarrotios
(borrador)
Bopha, koe 6
46,462? a
3, obser = “7 a
[ips Zaany VS
E42 2% My
Qé3s & al Inliroiter J gSralde: ol zal I
abe al /
gah,
LoS Reap (1S
C 5305
ze Esk-0
06 El Kae a @
6, Ka
r
3405 + Kes)
-a) ay
As Es uo \t
Reb
FLOR 7
- stus +h)
- S445 i
“ie, 98& 4. _s tos rea
S90 [a 5105 Fy
Sanit deh un)
“1692 25)
a SHOSSHRT | Oy
Zona exclusiva para
(o) o calculos y desarrollos
e (borrador)
$s 24 ¢28
Elin
LS gi cis
oi WS < E4.bc%
f- 0,59
4 yr < Wy, 653
a
oir 32
También podría gustarte
- Introducción Al HMI y MESDocumento4 páginasIntroducción Al HMI y MESMARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Introducción SFC ModDocumento4 páginasIntroducción SFC ModMARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- pc3 TermofluidosDocumento19 páginaspc3 TermofluidosMARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Introdución A MPS + PLCDocumento4 páginasIntrodución A MPS + PLCMARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- MTR218 - PD4 - 2023-0Documento1 páginaMTR218 - PD4 - 2023-0MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- MTR218 - PD5 - 2023-0Documento1 páginaMTR218 - PD5 - 2023-0MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- MEC284 EX1 2023-0 (Enunciado Con Sol Nota 20)Documento10 páginasMEC284 EX1 2023-0 (Enunciado Con Sol Nota 20)MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Guia Control1 Lab2 Ver2023Documento29 páginasGuia Control1 Lab2 Ver2023MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- 2021 0 Preguntas-PC1Documento4 páginas2021 0 Preguntas-PC1MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Preguntas PC1 2020 2Documento3 páginasPreguntas PC1 2020 2MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Preguntas PC1 2020 1Documento3 páginasPreguntas PC1 2020 1MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones
- Anexos Uniones Atornilladas V 18-1Documento9 páginasAnexos Uniones Atornilladas V 18-1MARVIN RAI ARISMENDIZ MILLONESAún no hay calificaciones