También podría gustarte
- Ejercicio de Analsis.Documento17 páginasEjercicio de Analsis.Peralta Gonzales Alexander JamesAún no hay calificaciones
- Folleto 1Documento5 páginasFolleto 1FILBERTO QUISAGUANOAún no hay calificaciones
- Trabajo de Cinetica QuimicaDocumento2 páginasTrabajo de Cinetica QuimicaSantiago ZorrillaAún no hay calificaciones
- Problema EstaticaDocumento11 páginasProblema EstaticaYEYSON ELI SEGOVIA ZABALETAAún no hay calificaciones
- Sol P1 Mra 23iDocumento5 páginasSol P1 Mra 23ijeison antonAún no hay calificaciones
- Actividad Centros Instantáneos de VelocidadDocumento12 páginasActividad Centros Instantáneos de VelocidadJesus LeitonAún no hay calificaciones
- Actividad Centros Instantáneos de VelocidadDocumento11 páginasActividad Centros Instantáneos de VelocidadJesus LeitonAún no hay calificaciones
- TQS02. - Práctica - de - Vectores - en - El - Espacio 2Documento6 páginasTQS02. - Práctica - de - Vectores - en - El - Espacio 2Brayam Torres100% (1)
- Examen Algebra Lineal 2 2011 2 PautaDocumento3 páginasExamen Algebra Lineal 2 2011 2 PautaChristopher Fuentes DeviaAún no hay calificaciones
- PARTE JOSÉ - Tercer TareaDocumento5 páginasPARTE JOSÉ - Tercer TareaJose AdrianAún no hay calificaciones
- Producto Academico #01: 1. Determinar El Dominio de La Función MostradaDocumento7 páginasProducto Academico #01: 1. Determinar El Dominio de La Función MostradaYoel Rony ChaconAún no hay calificaciones
- PC Calderón Abanto Análisis EstructuralDocumento29 páginasPC Calderón Abanto Análisis EstructuralJhonatan PedrozoAún no hay calificaciones
- Pauta Prueba 1 Práctica IOCC 211 - 06 Oct 2021Documento5 páginasPauta Prueba 1 Práctica IOCC 211 - 06 Oct 2021Renan FlandezAún no hay calificaciones
- Taller 2 Mecánica Del Medio ContinuoDocumento10 páginasTaller 2 Mecánica Del Medio ContinuoDANIEL ESTEBAN RODRÍGUEZ TORRESAún no hay calificaciones
- Unidad1.ejercicio 4 y 5 Metodo GraficoDocumento3 páginasUnidad1.ejercicio 4 y 5 Metodo GraficoStudentTechHMAún no hay calificaciones
- Espectros de Diseño Colombia 2.1Documento36 páginasEspectros de Diseño Colombia 2.1cruzpanessoAún no hay calificaciones
- Ejercicios de Espacios Vectoriales - TexDocumento2 páginasEjercicios de Espacios Vectoriales - TexLilly RFAún no hay calificaciones
- Ejemplo EDODocumento3 páginasEjemplo EDOagustin laraAún no hay calificaciones
- Tema 12Documento15 páginasTema 12miguel_vaquero_3Aún no hay calificaciones
- Principio de La Conservación de La Materia INFORMEDocumento6 páginasPrincipio de La Conservación de La Materia INFORMEJimmy MuñozAún no hay calificaciones
- Momentos de InerciaDocumento2 páginasMomentos de InerciaOliver Juan José100% (2)
- Espacios Vectoriales ExplicacionDocumento30 páginasEspacios Vectoriales ExplicacionSaraAún no hay calificaciones
- Practica 5. Empaquetamientos Atomicos. Planos Y Direcciones DensasDocumento29 páginasPractica 5. Empaquetamientos Atomicos. Planos Y Direcciones DensasanaAún no hay calificaciones
- MaterialesDocumento14 páginasMaterialesDaniel RamirezAún no hay calificaciones
- MR 347 2019-IiDocumento6 páginasMR 347 2019-IiJosé Gregorio PérezAún no hay calificaciones
- Control3 - 2022-3 - 10143 - G1 - Una SolucionDocumento3 páginasControl3 - 2022-3 - 10143 - G1 - Una SolucionaguguAún no hay calificaciones
- 3.24 Ejercicio de EstáticaDocumento5 páginas3.24 Ejercicio de EstáticaErick de JesusAún no hay calificaciones
- Práctica Calificada 1 16 Noviembre 2022Documento12 páginasPráctica Calificada 1 16 Noviembre 2022jairisaacdiazlozano83Aún no hay calificaciones
- Entrega 1. Evaluación Práctica: Jean Carlos Acosta CedanoDocumento8 páginasEntrega 1. Evaluación Práctica: Jean Carlos Acosta CedanoDilan Steven Reyes MorenoAún no hay calificaciones
- Pauta Prueba 2 1S 2022Documento5 páginasPauta Prueba 2 1S 2022GONZALO AYCA TICONAAún no hay calificaciones
- Ejemplo10 2Documento8 páginasEjemplo10 2Andres EscobedoAún no hay calificaciones
- TALLER 2 Calculo NumericoDocumento8 páginasTALLER 2 Calculo NumericomanriquebautistajAún no hay calificaciones
- Matrices 2Documento12 páginasMatrices 2Estibaliz Aybar LuqueAún no hay calificaciones
- Sol P2 Mra 23iDocumento4 páginasSol P2 Mra 23ijeison antonAún no hay calificaciones
- Trabajo Grupal Datos AgrupadosDocumento4 páginasTrabajo Grupal Datos AgrupadosDouglas LucioAún no hay calificaciones
- Graficos de TablasDocumento3 páginasGraficos de TablasAnnie MachacaAún no hay calificaciones
- Aplicaciones de Vectores: TemaDocumento36 páginasAplicaciones de Vectores: TemawilverAún no hay calificaciones
- Adobe Scan 10 Jul. 2023Documento2 páginasAdobe Scan 10 Jul. 2023Oscar SuárezAún no hay calificaciones
- Diagrama Y Tabla DH Parte 2Documento5 páginasDiagrama Y Tabla DH Parte 2MARCOS GILBERTO MEDINA PÉREZAún no hay calificaciones
- Int Trap.Documento9 páginasInt Trap.Karina valderrama CabreraAún no hay calificaciones
- EJEM - T InvertidaDocumento3 páginasEJEM - T InvertidaMirtha CastroAún no hay calificaciones
- 5 Ejercicios Resueltos de CalculoDocumento5 páginas5 Ejercicios Resueltos de CalculoIsmael Achocalla GutierrezAún no hay calificaciones
- 10 Virtual Reporte Procesos TermodinámicosDocumento4 páginas10 Virtual Reporte Procesos TermodinámicosOscar Infantes suarezAún no hay calificaciones
- Lab2 0Documento20 páginasLab2 0Harol Taysú Taboada MartinezAún no hay calificaciones
- Clase#14Documento8 páginasClase#14Gominola3010 GominolaAún no hay calificaciones
- 2-2012-APCNº9-Algebra Lineal-ICOM-UDPDocumento10 páginas2-2012-APCNº9-Algebra Lineal-ICOM-UDPmenriquecAún no hay calificaciones
- Ejercicio IdwDocumento3 páginasEjercicio IdwNelson xD Coaguila TarifaAún no hay calificaciones
- Listadeejercicios SolucionarioDocumento18 páginasListadeejercicios Solucionariocositas para muñecasAún no hay calificaciones
- Clase de Auxiliatura31Documento5 páginasClase de Auxiliatura31Revleg ZerreitugAún no hay calificaciones
- ModLineal LinealNolIneal SinRuido v1-2Documento20 páginasModLineal LinealNolIneal SinRuido v1-2jeseAún no hay calificaciones
- Curvas de Adiciones PatrónDocumento11 páginasCurvas de Adiciones PatrónRicardo HernandezAún no hay calificaciones
- Soluciones Examen RXDocumento44 páginasSoluciones Examen RXSandra Gómez RodríguezAún no hay calificaciones
- Algebra Lineal TL2012 PDFDocumento5 páginasAlgebra Lineal TL2012 PDFJose LarreaAún no hay calificaciones
- ANEXOSDocumento16 páginasANEXOSjavierAún no hay calificaciones
- Ejercicio 2.2.12Documento2 páginasEjercicio 2.2.12alesandra mlAún no hay calificaciones
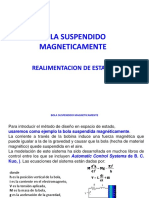
- Bola Suspendido MagneticamenteDocumento10 páginasBola Suspendido MagneticamenteMilo VanvanAún no hay calificaciones
- Final - Señales y SistemasDocumento7 páginasFinal - Señales y SistemasMiguel Andres Nieto LozanoAún no hay calificaciones
- Motor DC Por Induccion MatlabDocumento11 páginasMotor DC Por Induccion MatlabWilliam Medina GómezAún no hay calificaciones
- Cinetica EjerciciosDocumento17 páginasCinetica EjerciciosNayrith FebresAún no hay calificaciones
- Informe Calor Sensible y Calor LatenteDocumento7 páginasInforme Calor Sensible y Calor LatenteJuan Camilo PulidoAún no hay calificaciones
- BalotasDocumento2 páginasBalotasJuan Camilo PulidoAún no hay calificaciones
- Auxiliar Docente PDFDocumento2 páginasAuxiliar Docente PDFJuan Camilo PulidoAún no hay calificaciones
- BASE HECGA Plano Uwu PDFDocumento1 páginaBASE HECGA Plano Uwu PDFJuan Camilo PulidoAún no hay calificaciones
- PeonDocumento4 páginasPeonJuan Camilo PulidoAún no hay calificaciones
- PLanos BicicletaDocumento1 páginaPLanos BicicletaJuan Camilo PulidoAún no hay calificaciones
- Diagrama de Cuerpo LibreDocumento3 páginasDiagrama de Cuerpo LibreJuan Camilo PulidoAún no hay calificaciones
- Informe MetrologiaDocumento5 páginasInforme MetrologiaJuan Camilo PulidoAún no hay calificaciones
- Formato TecnicoDocumento14 páginasFormato TecnicoJuan Camilo PulidoAún no hay calificaciones
- Ensayo October SkyDocumento2 páginasEnsayo October SkyJuan Camilo PulidoAún no hay calificaciones
- Teologia Politica e ImagenDocumento13 páginasTeologia Politica e ImagenivanpintoveasAún no hay calificaciones
- T LBC 140280Documento105 páginasT LBC 140280SergioArmandoGtzOrantesAún no hay calificaciones
- Cuaderno de Informes 1 ROCADocumento15 páginasCuaderno de Informes 1 ROCAAbraham RocaAún no hay calificaciones
- Canalón Autoportante ABM 680 PDFDocumento1 páginaCanalón Autoportante ABM 680 PDFJavier HerreraAún no hay calificaciones
- Guia - de TransmisionDocumento17 páginasGuia - de TransmisionDANNEYSAún no hay calificaciones
- Cuanto Falta para El 5 de Enero - Buscar Con GoogleDocumento1 páginaCuanto Falta para El 5 de Enero - Buscar Con Googleqpnpdz8kpxAún no hay calificaciones
- Sueños en Las EstrellasDocumento4 páginasSueños en Las EstrellasNatalia GómezAún no hay calificaciones
- Ocopilla Analisis CrecimientoDocumento14 páginasOcopilla Analisis CrecimientoGabriel LeoAún no hay calificaciones
- Quirofano de HemodinamiaDocumento3 páginasQuirofano de Hemodinamiaapi-446914421Aún no hay calificaciones
- Melaminorte 1Documento51 páginasMelaminorte 1Sheyla AmancioAún no hay calificaciones
- 1 - Semana 06 - S1 - Integrales Impropias 1Documento25 páginas1 - Semana 06 - S1 - Integrales Impropias 1Andrés ChangAún no hay calificaciones
- Esquina PeligrosaDocumento2 páginasEsquina PeligrosaNorma CastilloAún no hay calificaciones
- Psicotécnico CemDocumento27 páginasPsicotécnico Cemcesar davidAún no hay calificaciones
- Conclusiones Matriz de Analisis de Riesgos (Grupo)Documento6 páginasConclusiones Matriz de Analisis de Riesgos (Grupo)Suzette Bowie100% (1)
- A81kj01 Removedor IndustrialDocumento2 páginasA81kj01 Removedor IndustrialAlberto OchoaAún no hay calificaciones
- Ficha Informacion de FamiliaDocumento2 páginasFicha Informacion de Familiacesar ignacioAún no hay calificaciones
- Folleto Maestría en Gestión de TI UNADDocumento16 páginasFolleto Maestría en Gestión de TI UNADfranco1702Aún no hay calificaciones
- NL 20221120Documento100 páginasNL 20221120Legal MyGacorAún no hay calificaciones
- Programa Analitico MicrobiologíaDocumento2 páginasPrograma Analitico MicrobiologíaPonce Alejandro LuisAún no hay calificaciones
- Business Model Canvas (Pagina Arriendo Canchas)Documento1 páginaBusiness Model Canvas (Pagina Arriendo Canchas)Ignacio SalasAún no hay calificaciones
- 4 Operaciones Con Monomios IIDocumento23 páginas4 Operaciones Con Monomios IIAna CuentalAún no hay calificaciones
- Retos Arduino-Básico 1Documento7 páginasRetos Arduino-Básico 1Victor Alfaro PatracaAún no hay calificaciones
- Guia Pastillas GuitarraDocumento10 páginasGuia Pastillas GuitarraMartinFebreiroAún no hay calificaciones
- Análisis Sobre El Reglamento de Facturación, Documentos Fiscales y Registro Fiscal de Imprentas PDFDocumento10 páginasAnálisis Sobre El Reglamento de Facturación, Documentos Fiscales y Registro Fiscal de Imprentas PDFMercedes LopezAún no hay calificaciones
- Actividad Entregable 2Documento10 páginasActividad Entregable 2Gabriel Alessandro Nicho GarciaAún no hay calificaciones
- Unidad 5 ProcesosDocumento18 páginasUnidad 5 ProcesosLUIS HUMBERTO DEL PRADO AGUIRREAún no hay calificaciones
- PotenciadorDocumento4 páginasPotenciadorRayan UnidosAún no hay calificaciones
- Marco TeóricoDocumento3 páginasMarco TeóricoMilena MesaAún no hay calificaciones
- Estadistica Básica - Actividad SuplementariaDocumento5 páginasEstadistica Básica - Actividad SuplementariaIker CastilloAún no hay calificaciones
- Lo Que Se Aprende en Los Mejores MBA2008Documento53 páginasLo Que Se Aprende en Los Mejores MBA2008PedroAún no hay calificaciones