También podría gustarte
- Rigidez y Analisis DinamicoDocumento24 páginasRigidez y Analisis DinamicoNei Arévalo Roque67% (3)
- Ejecicio 14.41-14.45Documento7 páginasEjecicio 14.41-14.45Andry Dominguez BuelbasAún no hay calificaciones
- Resumen Física Décimo AñoDocumento9 páginasResumen Física Décimo AñoAuletAún no hay calificaciones
- Configuracion ElectronicaDocumento20 páginasConfiguracion ElectronicaPaul CR100% (1)
- Taller 2 - Fisica IIIDocumento10 páginasTaller 2 - Fisica IIIJUAN JOSE RAMIREZ MARTINEZAún no hay calificaciones
- DISCUSIONES Calor Espefico.Documento2 páginasDISCUSIONES Calor Espefico.Anita UshiñaAún no hay calificaciones
- Muro ContenciomDocumento45 páginasMuro ContenciomYardy Guzman OsccoAún no hay calificaciones
- Correlacion Poettmann y CarpenterDocumento16 páginasCorrelacion Poettmann y CarpenterlixhellAún no hay calificaciones
- Diseño Termodinamico de Ic. Elmer Jiménez ÁlvarezDocumento12 páginasDiseño Termodinamico de Ic. Elmer Jiménez ÁlvarezElmer Jimenez Alvarez100% (3)
- Sesión 12-13 - Teoría y Problemas de Aplicación PDFDocumento3 páginasSesión 12-13 - Teoría y Problemas de Aplicación PDFGuthixito Jya67% (3)
- Las Fuerzas ResistivasDocumento14 páginasLas Fuerzas Resistivasalvaro cortes0% (1)
- Mecanica PDFDocumento295 páginasMecanica PDFLuisGómez100% (1)
- Fisica 1 - Cinematica 1Documento22 páginasFisica 1 - Cinematica 1Ales DiesroAún no hay calificaciones
- Separata de CinemáticaDocumento11 páginasSeparata de CinemáticaEduardo MelgarejoAún no hay calificaciones
- Caída LibreDocumento9 páginasCaída LibreyllekprAún no hay calificaciones
- Formulario Física I (Vectores, Cinemática y 1° Ley de Newton)Documento6 páginasFormulario Física I (Vectores, Cinemática y 1° Ley de Newton)Palacios Hernández Carlos DanielAún no hay calificaciones
- Informe de Laboratorio 2 Caida Libre y MDocumento5 páginasInforme de Laboratorio 2 Caida Libre y Mdiana rAún no hay calificaciones
- Semana #06 - Impulso y Cantidad de MovimientoDocumento22 páginasSemana #06 - Impulso y Cantidad de MovimientoCesar Bendrell AlzamoraAún no hay calificaciones
- Teoría Cinemática. Mov Simples, Horizontal y Oblicuo (Drive)Documento6 páginasTeoría Cinemática. Mov Simples, Horizontal y Oblicuo (Drive)luciacaceresrodrigoAún no hay calificaciones
- Cinemática en Una Dimención 2Documento29 páginasCinemática en Una Dimención 2Gastón PomarAún no hay calificaciones
- Apol 2022 - SOLUCIONARIO FÍSICADocumento9 páginasApol 2022 - SOLUCIONARIO FÍSICAVicente TorresAún no hay calificaciones
- Resúmen Mecánica Común @fisica - NotesDocumento29 páginasResúmen Mecánica Común @fisica - NotesFabAún no hay calificaciones
- U2 1 MruvDocumento5 páginasU2 1 MruvmattAún no hay calificaciones
- FC - Cuaderno de Ejercicios N°4Documento50 páginasFC - Cuaderno de Ejercicios N°4Victoria LuksicAún no hay calificaciones
- Cinematica 03Documento14 páginasCinematica 03marianoAún no hay calificaciones
- Informe Dos Fis 102 Movimiento OscilatorioDocumento23 páginasInforme Dos Fis 102 Movimiento OscilatorioKevin Abad liquitaya lopez0% (1)
- Introduccion A La BiofisicaDocumento34 páginasIntroduccion A La BiofisicaJuanJoséCastilloHinojosaAún no hay calificaciones
- UNIDAD II Fisica-SEM 3 DiapositivasDocumento14 páginasUNIDAD II Fisica-SEM 3 DiapositivasLEWIS AMELY INOCENTE VENTURAAún no hay calificaciones
- Informe Laboratorio MASDocumento7 páginasInforme Laboratorio MASFelipe Orozco BuitragoAún no hay calificaciones
- Física I - 2Documento50 páginasFísica I - 2Jőnäthän PlasëncîäAún no hay calificaciones
- Apendice C Cinematica Sep 2018Documento23 páginasApendice C Cinematica Sep 2018Juan Nava XuriyaAún no hay calificaciones
- Formulario FisicaDocumento7 páginasFormulario FisicaAndrés Quishpe CastroAún no hay calificaciones
- Cinematica y Movimento ContinuoDocumento40 páginasCinematica y Movimento Continuonamae jpAún no hay calificaciones
- T2 Cinematica y Dinamica 201920Documento53 páginasT2 Cinematica y Dinamica 201920ButanoWill100% (1)
- Cinematica - Fisica Basica FinalesDocumento33 páginasCinematica - Fisica Basica FinalesurielAún no hay calificaciones
- Cuerpos RigidosDocumento14 páginasCuerpos RigidosJose GonzalezAún no hay calificaciones
- Experiencia 3Documento7 páginasExperiencia 3YOSVIN KEVIN GONZALES ANTICONAAún no hay calificaciones
- Cinematica 03Documento15 páginasCinematica 03Miss WalkerAún no hay calificaciones
- Presentación CinemáticaDocumento29 páginasPresentación CinemáticaEnrique Alberto MartinelliAún no hay calificaciones
- Caida LibreDocumento15 páginasCaida LibreJesus RubioAún no hay calificaciones
- Movimiento en Una Dimensión y en Un PlanoDocumento29 páginasMovimiento en Una Dimensión y en Un PlanoDiegoÁlvarezZúñigaAún no hay calificaciones
- Fundamentos de Mecánica Semana 14 - CinematicaDocumento35 páginasFundamentos de Mecánica Semana 14 - CinematicaAngel NietoAún no hay calificaciones
- Cinemática en 1D ExperimentalDocumento18 páginasCinemática en 1D ExperimentalFabian CedilloAún no hay calificaciones
- S2 Mi160322 S4FS MruvDocumento3 páginasS2 Mi160322 S4FS Mruvmnolasco2009Aún no hay calificaciones
- Resumen FIsica (Cinematica)Documento7 páginasResumen FIsica (Cinematica)Tobias GrimauxAún no hay calificaciones
- CINEMÁTICADocumento25 páginasCINEMÁTICAIsabel VegaAún no hay calificaciones
- Cinematica TeoriaDocumento4 páginasCinematica TeoriaDIONISIOAún no hay calificaciones
- Mru y Mruv Virtual PDFDocumento16 páginasMru y Mruv Virtual PDFWidmar AguilarAún no hay calificaciones
- Cinemática en 1D Experimental PDFDocumento18 páginasCinemática en 1D Experimental PDFMarcos MoralesAún no hay calificaciones
- Ingeniería Fisica 1 2018Documento45 páginasIngeniería Fisica 1 2018RodrigoAún no hay calificaciones
- Apuntes ParabolicoDocumento5 páginasApuntes ParabolicojoaquinAún no hay calificaciones
- Index 7Documento55 páginasIndex 7marianaaguillonAún no hay calificaciones
- Fundamento Teorico 2023-1Documento9 páginasFundamento Teorico 2023-1Jordi Josue Giraldo GonzalesAún no hay calificaciones
- ApuntesDocumento5 páginasApuntesDaniel Sánchez VílchezAún no hay calificaciones
- Mru - MruaDocumento11 páginasMru - MruaMarlonAún no hay calificaciones
- Formulario CompletoDocumento13 páginasFormulario CompletoEdgar Gilberto Zúñiga ArenasAún no hay calificaciones
- Guia 3-Movimiento en Una DirecciónDocumento4 páginasGuia 3-Movimiento en Una DirecciónIvailo ApitzAún no hay calificaciones
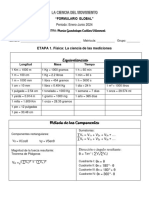
- Lcm-Formulario Global 2024Documento4 páginasLcm-Formulario Global 2024Daniel Alejandro Cantu GarcíaAún no hay calificaciones
- Cuerpos Rigidos-4Documento15 páginasCuerpos Rigidos-4Amelia yubelyn Rodriguez placenciaAún no hay calificaciones
- Tema2 - CinemáticaDocumento48 páginasTema2 - CinemáticaMARIA ELIASAún no hay calificaciones
- Dinamica - S13 - PPT - Vibraciones ArmónicasDocumento14 páginasDinamica - S13 - PPT - Vibraciones ArmónicasDiego ChavezAún no hay calificaciones
- Clase s6Documento30 páginasClase s6Esteban Távara HidalgoAún no hay calificaciones
- PTT SEMANA2 FISICA 1 CinemáticaDocumento30 páginasPTT SEMANA2 FISICA 1 CinemáticaWALTER MINCHOLA MENDOZAAún no hay calificaciones
- AlumnosDocumento14 páginasAlumnosCasaverde JimmyAún no hay calificaciones
- Desgranadora de MaizDocumento16 páginasDesgranadora de MaizSteven Cachago GonzálezAún no hay calificaciones
- Correccion Termodinamica P1Documento13 páginasCorreccion Termodinamica P1YoSoyAxelAún no hay calificaciones
- 4to Sec Estado GaseosoDocumento3 páginas4to Sec Estado GaseosoJoEl Perez0% (2)
- Termodinamica de HidrocarburosDocumento5 páginasTermodinamica de HidrocarburosRafaelAndresRangelAún no hay calificaciones
- Memoria de Calculo de Techo Kalimet Grupo Kala Rev 09Documento16 páginasMemoria de Calculo de Techo Kalimet Grupo Kala Rev 09Martha Huaman GutierrezAún no hay calificaciones
- 2005.internacional de La Física. Año Einstein. Historia de La Ecuación: E MCDocumento15 páginas2005.internacional de La Física. Año Einstein. Historia de La Ecuación: E MCramon fifo (ramonputo)Aún no hay calificaciones
- Fisica Practico 2 Mapeo de Campo ElectricoDocumento4 páginasFisica Practico 2 Mapeo de Campo ElectricoMaria Gabriela de GalvezAún no hay calificaciones
- EyRM Clase 12 CorteDocumento27 páginasEyRM Clase 12 CorteAlepaffuAún no hay calificaciones
- Vibraciones en Fundaciones Ing LeoniDocumento44 páginasVibraciones en Fundaciones Ing Leonisilvio_ramos_3Aún no hay calificaciones
- Taller 1 de MecanismosDocumento2 páginasTaller 1 de MecanismostanainaAún no hay calificaciones
- 02 P El Metodo CientificoDocumento5 páginas02 P El Metodo CientificoKenya MirandaAún no hay calificaciones
- Configuración ElectrónicaDocumento5 páginasConfiguración ElectrónicalujulAún no hay calificaciones
- Informe de Concreto Armado IDocumento38 páginasInforme de Concreto Armado IJhosep Anthony Aguilar VeramendiAún no hay calificaciones
- Guía 1 DinámicaDocumento4 páginasGuía 1 DinámicaCatalina FernándezAún no hay calificaciones
- Taller de Física Grado 11º IIDocumento22 páginasTaller de Física Grado 11º IIcristanchoduqueAún no hay calificaciones
- Fisica 2 PP - 2020 - 1Documento1 páginaFisica 2 PP - 2020 - 1Jean Pierre QuirozAún no hay calificaciones
- Memoria Ramada 4x4Documento32 páginasMemoria Ramada 4x4Adan David Mejia NoriegaAún no hay calificaciones
- Laboratorio Capacidad CalorificaDocumento12 páginasLaboratorio Capacidad CalorificaJuan Carlos Farfan RomeroAún no hay calificaciones
- Aportes Científicos en La Mecánica de SolidosDocumento4 páginasAportes Científicos en La Mecánica de SolidosJorge Iván RamirezAún no hay calificaciones
- Ejercicio 5) ResueltoDocumento3 páginasEjercicio 5) ResueltoVann AcostaAún no hay calificaciones