También podría gustarte
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Deber 07Documento8 páginasDeber 07ThaisAún no hay calificaciones
- Álgebra Tensorial, Oscar PalmasDocumento20 páginasÁlgebra Tensorial, Oscar PalmasHomero Ruiz HernandezAún no hay calificaciones
- Semana 11Documento28 páginasSemana 11Saúl OrtizAún no hay calificaciones
- Linoper SelfadjointDocumento5 páginasLinoper SelfadjointDiego GuerreroAún no hay calificaciones
- Isomorfos Espacios VecotrialesDocumento4 páginasIsomorfos Espacios VecotrialesJosé H MariñoAún no hay calificaciones
- Espacios InvariantesDocumento4 páginasEspacios Invariantesyordan aguilar ruizAún no hay calificaciones
- Ejercicios de ALDocumento27 páginasEjercicios de ALDiana PadiiAún no hay calificaciones
- Resumen para Algebra II PDFDocumento10 páginasResumen para Algebra II PDFDavid NavarreteAún no hay calificaciones
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesRoger Isarael Castellanos ZamudioAún no hay calificaciones
- 4.1 Defnicion de Espacio VectorialDocumento2 páginas4.1 Defnicion de Espacio Vectorialalex MarcinAún no hay calificaciones
- Espacios VectorialesDocumento8 páginasEspacios VectorialesJY96Aún no hay calificaciones
- DualDocumento2 páginasDualGonzalo de SouzaAún no hay calificaciones
- Notas de Algebra 3Documento14 páginasNotas de Algebra 3Luis AlanísAún no hay calificaciones
- Capítulo 6Documento10 páginasCapítulo 6Eduardo Gindel LadowskiAún no hay calificaciones
- Parcial SolDocumento5 páginasParcial SolLuis Alvarado AvalosAún no hay calificaciones
- Capítulo 03 Álgebra Lineal Fascgrado2 Gabriela Jeronimo-77-106Documento30 páginasCapítulo 03 Álgebra Lineal Fascgrado2 Gabriela Jeronimo-77-106Juan D GonzálezAún no hay calificaciones
- Fundamentos de Álgebra LinealDocumento15 páginasFundamentos de Álgebra LinealDanielSantos1987Aún no hay calificaciones
- alumnosLIBRO MAT1203Documento89 páginasalumnosLIBRO MAT1203VALENTINA CARVAJALAún no hay calificaciones
- Espacios Vectoriales y Sus PropiedadesDocumento7 páginasEspacios Vectoriales y Sus PropiedadesEduardo GutierrezAún no hay calificaciones
- Deber 06 Parte 2Documento5 páginasDeber 06 Parte 2ThaisAún no hay calificaciones
- Trabajo de Transformacion Lineales TerminadoDocumento22 páginasTrabajo de Transformacion Lineales TerminadoFrancisco Javier ObandoAún no hay calificaciones
- M M II TensoresDocumento29 páginasM M II TensoresAlejandroAún no hay calificaciones
- HojaEjercicios Algebra 14Documento3 páginasHojaEjercicios Algebra 14Edison Espinel SevillaAún no hay calificaciones
- Algebra Lineal DemostracionesDocumento22 páginasAlgebra Lineal DemostracionesLuis Alejandro Málaga AllcaAún no hay calificaciones
- Valores y Vectores Propios de Un Operador LinealDocumento53 páginasValores y Vectores Propios de Un Operador LinealEdwin CabreraAún no hay calificaciones
- 4 Transformacion LinealDocumento5 páginas4 Transformacion LinealJose Luis Valverde MoralesAún no hay calificaciones
- 01 2.1 Ap PDFDocumento7 páginas01 2.1 Ap PDFJocelyn Aravena VelardeAún no hay calificaciones
- Transformaciones Lineales TrabajoDocumento22 páginasTransformaciones Lineales TrabajoDARWINSOLAún no hay calificaciones
- Transformaciones LinealesDocumento8 páginasTransformaciones LinealesKEVIN MARIÑOAún no hay calificaciones
- Semana 4Documento15 páginasSemana 4josse obandoAún no hay calificaciones
- BasesDocumento19 páginasBasesEmanuelRomeroGAún no hay calificaciones
- ALII-2 1TarIndDocumento11 páginasALII-2 1TarIndVarenca ApodacaAún no hay calificaciones
- Tema 1Documento24 páginasTema 1eliseo noeAún no hay calificaciones
- Auxiliar 9 Transformaciones LinealesDocumento2 páginasAuxiliar 9 Transformaciones LinealesKEVIN MARIÑOAún no hay calificaciones
- Deber 3Documento8 páginasDeber 3ThaisAún no hay calificaciones
- Transformaciones LinealesDocumento13 páginasTransformaciones LinealesAlexis Eduardo Almendras ValdebenitoAún no hay calificaciones
- 70 Bases y DimensionDocumento16 páginas70 Bases y Dimension32814295Aún no hay calificaciones
- Apunte 2: Combinación Lineal, Sistema Generador de Un E-V, Independencia LínealDocumento7 páginasApunte 2: Combinación Lineal, Sistema Generador de Un E-V, Independencia LínealJocelyn Aravena VelardeAún no hay calificaciones
- Forma Racional PDFDocumento5 páginasForma Racional PDFPeter BAún no hay calificaciones
- Resumen - Ayudantía 2Documento4 páginasResumen - Ayudantía 2Josefa SilvaAún no hay calificaciones
- Notas de Clases 5 - Valores y Vectores PropiosDocumento29 páginasNotas de Clases 5 - Valores y Vectores PropiosHector SantanaAún no hay calificaciones
- Unidad 6 - Transformaciones LinealesDocumento45 páginasUnidad 6 - Transformaciones LinealesLeaandro EspamerAún no hay calificaciones
- Cap12 Aplicaciones LinealesDocumento27 páginasCap12 Aplicaciones LinealesJuan Reyes PasteneAún no hay calificaciones
- 33545-Texto Del Artículo-124543-1-10-20120927Documento3 páginas33545-Texto Del Artículo-124543-1-10-20120927Rodrigo Montero GozálezAún no hay calificaciones
- Álgebra Lineal I (Grupo 4112) - Clase 3. Ejercicios ResueltosDocumento4 páginasÁlgebra Lineal I (Grupo 4112) - Clase 3. Ejercicios ResueltosFernando MoralesAún no hay calificaciones
- U1 CV Algebra de VectoresDocumento12 páginasU1 CV Algebra de VectoresAlexsandro Love MusicAún no hay calificaciones
- 10 ValPropiosDocumento15 páginas10 ValPropiosMishell GuanoAún no hay calificaciones
- GAL2-producto InternoDocumento46 páginasGAL2-producto InternoAndrea SubeldiaAún no hay calificaciones
- Espacios VectorialesDocumento9 páginasEspacios VectorialesJoel HuillcaAún no hay calificaciones
- 3 CAPITULO IV Sem 3 Vectores PropiosDocumento14 páginas3 CAPITULO IV Sem 3 Vectores PropiosFernando Daniel Mamani MamaniAún no hay calificaciones
- Densidad 1Documento4 páginasDensidad 1adalitAún no hay calificaciones
- G1tema4 PDFDocumento9 páginasG1tema4 PDFKevin PinedaAún no hay calificaciones
- Notas para El Curso de Algebra Lineal II (Frank P. Murphy)Documento49 páginasNotas para El Curso de Algebra Lineal II (Frank P. Murphy)Germán Toxqui ColulaAún no hay calificaciones
- PDF Organisasi Fakultas Psikologi Undip - CompressDocumento80 páginasPDF Organisasi Fakultas Psikologi Undip - CompressANA DEWI WULAN SARIAún no hay calificaciones
- Formas Canonicas Reales PDFDocumento8 páginasFormas Canonicas Reales PDFLuis MAún no hay calificaciones
- GAL2 IsometriasDocumento12 páginasGAL2 IsometriasJeancarlo RivasAún no hay calificaciones
- Tranformacion Lineal InversaDocumento6 páginasTranformacion Lineal Inversaprofe.alexAún no hay calificaciones
- Clase 21. - (2020-05-11) LIBRO ÁLG. LINEAL CAP. 4 PDFDocumento78 páginasClase 21. - (2020-05-11) LIBRO ÁLG. LINEAL CAP. 4 PDFArturo NavarroAún no hay calificaciones
- Raices ComplejasDocumento10 páginasRaices ComplejasChristian Asencios HuertaAún no hay calificaciones
- Asencios Huerta Christian LuisDocumento62 páginasAsencios Huerta Christian LuisChristian Asencios HuertaAún no hay calificaciones
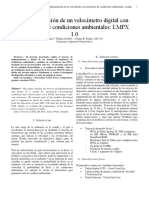
- Proyecto Final, Electrónica Digital II. Implementación de Un Velocímetro Con Monitoreo de Condiciones Ambientales. Acuña, Gómez.Documento12 páginasProyecto Final, Electrónica Digital II. Implementación de Un Velocímetro Con Monitoreo de Condiciones Ambientales. Acuña, Gómez.Christian Asencios HuertaAún no hay calificaciones
- Fernando Carlos Anchante RivadeneyraDocumento9 páginasFernando Carlos Anchante RivadeneyraChristian Asencios HuertaAún no hay calificaciones
- Metodo de Gaus Jordan, Con Pivote y Sin PivoteDocumento7 páginasMetodo de Gaus Jordan, Con Pivote y Sin PivoteChristian Asencios HuertaAún no hay calificaciones
- Asencios Huerta Christian LuisDocumento62 páginasAsencios Huerta Christian LuisChristian Asencios HuertaAún no hay calificaciones
- EvalContCircuitos1 METODOS NUMERICOSDocumento7 páginasEvalContCircuitos1 METODOS NUMERICOSChristian Asencios HuertaAún no hay calificaciones
- Eval Cont Chole SkyDocumento6 páginasEval Cont Chole SkyChristian Asencios HuertaAún no hay calificaciones
- Sem1 SyDocumento2 páginasSem1 SyChristian Asencios HuertaAún no hay calificaciones
- D. Método de FactorizaciónDocumento29 páginasD. Método de FactorizaciónChristian Asencios HuertaAún no hay calificaciones
- Ejercicios para Octave CompressDocumento22 páginasEjercicios para Octave CompressChristian Asencios HuertaAún no hay calificaciones
- Raices ComplejasDocumento10 páginasRaices ComplejasChristian Asencios HuertaAún no hay calificaciones
- Factorización LUDocumento4 páginasFactorización LUChristian Asencios HuertaAún no hay calificaciones
- Universidad Nacional Mayor de San Marcos Facultad de Ingeniería Eléctrica Y Electrónica Asignatura de Métodos NuméricosDocumento6 páginasUniversidad Nacional Mayor de San Marcos Facultad de Ingeniería Eléctrica Y Electrónica Asignatura de Métodos NuméricosChristian Asencios HuertaAún no hay calificaciones
- S9a Grupo 1 Labo MetodosDocumento6 páginasS9a Grupo 1 Labo MetodosChristian Asencios HuertaAún no hay calificaciones
- EvaCon Polinomio de Ajuste CONDE CADILLO PDFDocumento4 páginasEvaCon Polinomio de Ajuste CONDE CADILLO PDFChristian Asencios HuertaAún no hay calificaciones
- 3 Mayo Setiembre 2014Documento1 página3 Mayo Setiembre 2014Franko Miguel SoteloAún no hay calificaciones
- Evaluación Continua - Aprox. Pol. TaylorDocumento3 páginasEvaluación Continua - Aprox. Pol. TaylorChristian Asencios HuertaAún no hay calificaciones
- Interpolación de LagrangeDocumento8 páginasInterpolación de LagrangeChristian Asencios HuertaAún no hay calificaciones
- LagrangeDocumento4 páginasLagrangeChristian Asencios HuertaAún no hay calificaciones
- Grupo1 s4 Dolittle Crout CholeskiDocumento7 páginasGrupo1 s4 Dolittle Crout CholeskiChristian Asencios HuertaAún no hay calificaciones
- Grupo1 s4 Dolittle Crout CholeskiDocumento7 páginasGrupo1 s4 Dolittle Crout CholeskiChristian Asencios HuertaAún no hay calificaciones
- LagrangeDocumento4 páginasLagrangeChristian Asencios HuertaAún no hay calificaciones
- D. Método de FactorizaciónDocumento29 páginasD. Método de FactorizaciónChristian Asencios HuertaAún no hay calificaciones
- Sem1 SyDocumento2 páginasSem1 SyChristian Asencios HuertaAún no hay calificaciones
- Metodo de Gaus Jordan, Con Pivote y Sin PivoteDocumento7 páginasMetodo de Gaus Jordan, Con Pivote y Sin PivoteChristian Asencios HuertaAún no hay calificaciones
- Eval Cont Chole SkyDocumento6 páginasEval Cont Chole SkyChristian Asencios HuertaAún no hay calificaciones
- Ejercicios para Octave CompressDocumento22 páginasEjercicios para Octave CompressChristian Asencios HuertaAún no hay calificaciones
- Factorización LUDocumento4 páginasFactorización LUChristian Asencios HuertaAún no hay calificaciones
- Características de Los RefrigerantesDocumento3 páginasCaracterísticas de Los RefrigerantesJorge Paredes67% (3)
- Guia de Trabajo 4, El Regulador FV PDFDocumento7 páginasGuia de Trabajo 4, El Regulador FV PDFFinca Integral Recreativa EducacionalAún no hay calificaciones
- EI Basado en Densidad para Identificacion de OutliersDocumento5 páginasEI Basado en Densidad para Identificacion de OutliersFacundo PiotroskiAún no hay calificaciones
- B4xIDE V1.0 ES enDocumento92 páginasB4xIDE V1.0 ES enAnonymous hhJo7zMfGEAún no hay calificaciones
- Esp U1 Ea ErbmDocumento7 páginasEsp U1 Ea ErbmKeyra MarzAún no hay calificaciones
- Tema 50 y 51 - Muestra-Tem-Fisica-Y-Quimica-Iii PDFDocumento30 páginasTema 50 y 51 - Muestra-Tem-Fisica-Y-Quimica-Iii PDFJuanLoredo100% (4)
- 2 2 TDF Cardan y EngancheDocumento6 páginas2 2 TDF Cardan y EngancheCarlos Cesar CepedaAún no hay calificaciones
- Interruptores SiemsDocumento2 páginasInterruptores SiemsDianaCarolinaCastrillonQuinteroAún no hay calificaciones
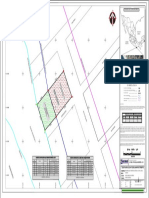
- Plano Sin Ortofoto Desarrollos Turisticos AztecaDocumento1 páginaPlano Sin Ortofoto Desarrollos Turisticos AztecaCarlos HernandezAún no hay calificaciones
- Cuerdas y PoleasDocumento12 páginasCuerdas y PoleasAlex GonzalezAún no hay calificaciones
- Maq y Equip Termicos IDocumento14 páginasMaq y Equip Termicos IEmmanuel RangelAún no hay calificaciones
- Prueba Lineas Paralelas y PerpendicularesDocumento3 páginasPrueba Lineas Paralelas y PerpendicularesMichael Roww100% (5)
- Unidad V. - Proyectos de InversionDocumento13 páginasUnidad V. - Proyectos de InversionCarlos Perozo100% (1)
- RP-MAT2-K18 - Ficha #18Documento11 páginasRP-MAT2-K18 - Ficha #18clever0% (1)
- CAP 2C EvaporadoresDocumento157 páginasCAP 2C EvaporadoresJerry Mamani AñamuroAún no hay calificaciones
- Guía 5 - Dinámica AplicadaDocumento3 páginasGuía 5 - Dinámica AplicadaRolexAún no hay calificaciones
- Cuestionario JaimeDocumento16 páginasCuestionario JaimeEbeysa GuerraAún no hay calificaciones
- Estudio Ecologico MGDocumento36 páginasEstudio Ecologico MGRaul Cerron GarciaAún no hay calificaciones
- Equipo Osart y Celdas ElectroquímicasDocumento17 páginasEquipo Osart y Celdas ElectroquímicasJosepepe Bedolla BAún no hay calificaciones
- Inhaloterapia y NebulizacionesDocumento47 páginasInhaloterapia y NebulizacionesAna Claudia Bullon Cuadra60% (5)
- 9 15 Dic EsfuerzosDocumento25 páginas9 15 Dic EsfuerzosSonlange Shantall CallerAún no hay calificaciones
- 01 Comentario À La JamónDocumento4 páginas01 Comentario À La JamónJaime Roldán CorralesAún no hay calificaciones
- LAB - Ospf - Clase2 - Jennyfer HernandezDocumento3 páginasLAB - Ospf - Clase2 - Jennyfer HernandezJennyfer HernandezAún no hay calificaciones
- CATALOGO Black DeckerDocumento16 páginasCATALOGO Black DeckerCarlos Tupayachi CruzAún no hay calificaciones
- Atributos SísmicosDocumento18 páginasAtributos SísmicosLuis Enrique Larraga Alvarez100% (2)
- Puente HidraulicoDocumento6 páginasPuente HidraulicoJosue Zenteno ortizAún no hay calificaciones
- Clave de Examen de Cálculo Diferencial Sem 2016-bDocumento2 páginasClave de Examen de Cálculo Diferencial Sem 2016-bVictor Carrion ManuelAún no hay calificaciones
- Fisiologia de BanderDocumento17 páginasFisiologia de BanderURPIAún no hay calificaciones
- 552 ManualOperacionSM3000 V1Documento56 páginas552 ManualOperacionSM3000 V1jrbmedAún no hay calificaciones
- Informe 3 PUENTE HDocumento12 páginasInforme 3 PUENTE HExpertos en AutomatizaciónAún no hay calificaciones