También podría gustarte
- TP 1 - Mat.2 - Resoluciones de Ejercicios 2.0rhrtyvgtyhbfghDocumento16 páginasTP 1 - Mat.2 - Resoluciones de Ejercicios 2.0rhrtyvgtyhbfghdefe80% (5)
- Solucionario Geometría 2°Documento40 páginasSolucionario Geometría 2°laplace200067% (6)
- GEOMETRIADocumento82 páginasGEOMETRIAyanfranco nuñezAún no hay calificaciones
- Ángulo TrigonométricoDocumento24 páginasÁngulo TrigonométricoJessikAraceltyAún no hay calificaciones
- U3-S3 (Tarea) Triángulos Rectángulos y OblicuángulosDocumento1 páginaU3-S3 (Tarea) Triángulos Rectángulos y OblicuángulosJesus EscalanteAún no hay calificaciones
- Razonamiento Matemático 2Documento57 páginasRazonamiento Matemático 2D Nk Peláez100% (1)
- Tarea G8Documento2 páginasTarea G8Oscar Palma BardalesAún no hay calificaciones
- 4.mini Formulario TrigonometriaDocumento5 páginas4.mini Formulario TrigonometriaLuis Ccasa CondoriAún no hay calificaciones
- Cuadernillo-20220529 2211279xj1Documento4 páginasCuadernillo-20220529 2211279xj1Franck Elías Huisa TutacanoAún no hay calificaciones
- Cuadernillo-20220529 2211279xj1Documento4 páginasCuadernillo-20220529 2211279xj1Franck Elías Huisa Tutacano100% (1)
- Geometria de Triangulos Prácticas...Documento5 páginasGeometria de Triangulos Prácticas...Tommy DiazAún no hay calificaciones
- Geometria Sem 5Documento4 páginasGeometria Sem 5Renzo Manuel Flores HoyosAún no hay calificaciones
- Geometria - R1 - Triángulo y Congruencia de TriángulosDocumento9 páginasGeometria - R1 - Triángulo y Congruencia de TriángulosEnrique PuenteAún no hay calificaciones
- 2023-Intensivo - .Resumen-Teoria de Triangulos I PDFDocumento8 páginas2023-Intensivo - .Resumen-Teoria de Triangulos I PDFMichel Alvarez SanchezAún no hay calificaciones
- 1 Guia-02 PDFDocumento3 páginas1 Guia-02 PDFJuvenal OchochoqueAún no hay calificaciones
- Tema 06 - TriángulosDocumento4 páginasTema 06 - Triángulosalexander Chambergo ChumánAún no hay calificaciones
- Practica 01 - Segmentos y AngulosDocumento7 páginasPractica 01 - Segmentos y AngulosGilberto Platero AratiaAún no hay calificaciones
- Ejercicios de Angulos para Tercer Grado de SecundariaDocumento5 páginasEjercicios de Angulos para Tercer Grado de SecundariaMiguel GuimarayAún no hay calificaciones
- Formulario TorreDocumento29 páginasFormulario TorreLorena ValiviesoAún no hay calificaciones
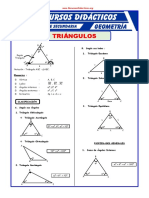
- TRIANGULOSDocumento4 páginasTRIANGULOSJcAún no hay calificaciones
- Ángulos Teoria y PrácticaDocumento3 páginasÁngulos Teoria y PrácticaFidel Gilberto Maima LazoAún no hay calificaciones
- Angulos en La Circunferencia para Tercer Grado de SecundariaDocumento6 páginasAngulos en La Circunferencia para Tercer Grado de SecundariaCristinaAún no hay calificaciones
- Trigonometría - Semana 2Documento2 páginasTrigonometría - Semana 2dariac.marquez.sanchezAún no hay calificaciones
- Práctica 01 - Geometría y Trigonometría - Con ClavesDocumento7 páginasPráctica 01 - Geometría y Trigonometría - Con ClaveskerzAún no hay calificaciones
- Forumario de Geometria-1 221019 094357Documento30 páginasForumario de Geometria-1 221019 094357Saul ChambiAún no hay calificaciones
- TrigonometriaDocumento6 páginasTrigonometriaMiguel AcevedoAún no hay calificaciones
- G - 1 (Triangulos y Lineas Notables)Documento6 páginasG - 1 (Triangulos y Lineas Notables)garciaayayjenifermaricieloAún no hay calificaciones
- CEPU 2023 III - GT 01 (Con Claves)Documento6 páginasCEPU 2023 III - GT 01 (Con Claves)jhosepmir choquecota medinaAún no hay calificaciones
- Pract. 01 - Geometria y TrigonometriaDocumento6 páginasPract. 01 - Geometria y TrigonometriaMaritza Julia Choque FloresAún no hay calificaciones
- Pract. 01-Geometria y TrigonometriaDocumento6 páginasPract. 01-Geometria y TrigonometriaEduardo JaissonAún no hay calificaciones
- Razones Trigonométricas de Ángulos Agudos para Quinto de SecundariaDocumento6 páginasRazones Trigonométricas de Ángulos Agudos para Quinto de SecundariaJose Armando Salazar CastroAún no hay calificaciones
- Geometría - Triángulos y Líneas Notables - Congruencia de Triángulos - Fusión Reg 1-2Documento8 páginasGeometría - Triángulos y Líneas Notables - Congruencia de Triángulos - Fusión Reg 1-2Christian NeyraAún no hay calificaciones
- Trigo No Me TriaDocumento21 páginasTrigo No Me TriaCristhian Montufar ValerAún no hay calificaciones
- 4Documento4 páginas4Kevin Aldair Pacheco HuamanAún no hay calificaciones
- Razones-Trigonométricas-de-Ángulos-Agudos 10Documento5 páginasRazones-Trigonométricas-de-Ángulos-Agudos 10Rudolf CarranzaAún no hay calificaciones
- Trigonometria IIIDocumento6 páginasTrigonometria IIILalisa gatito de AniAún no hay calificaciones
- Teoria y Problemas de Angulos CS31 Ccesa007Documento2 páginasTeoria y Problemas de Angulos CS31 Ccesa007Demetrio Ccesa Rayme100% (3)
- Reduccion Al Primer CuadranteDocumento3 páginasReduccion Al Primer CuadranteJavier RojasAún no hay calificaciones
- CC - PPT - Circunferencia y CírculoDocumento27 páginasCC - PPT - Circunferencia y CírculonadiadavilareyAún no hay calificaciones
- Guia 4 - Razones Trigonométricas de Ángulos AgudosDocumento23 páginasGuia 4 - Razones Trigonométricas de Ángulos AgudosMatias Solis Edgar0% (1)
- ESTRUCTURAS (Ing. Orlando Ochoa Zevallos)Documento128 páginasESTRUCTURAS (Ing. Orlando Ochoa Zevallos)Juan Manuel100% (1)
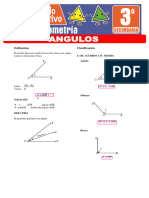
- ÁNGULOSDocumento4 páginasÁNGULOSJohn NeperAún no hay calificaciones
- RAZONES TRIGONOMÉTRICASaDocumento5 páginasRAZONES TRIGONOMÉTRICASaJorge Alberto Osejo AlmeidaAún no hay calificaciones
- Práct. 01 - Geometria y TrigonometriaDocumento7 páginasPráct. 01 - Geometria y TrigonometriaAlheli ChipanaAún no hay calificaciones
- p01 Angulos 2022 I SCDocumento7 páginasp01 Angulos 2022 I SCGilberto Platero AratiaAún no hay calificaciones
- Propiedades de Ángulos en La Circunferencia para Tercer Grado de UniversidadDocumento3 páginasPropiedades de Ángulos en La Circunferencia para Tercer Grado de UniversidadJijoAún no hay calificaciones
- CuadriláterosDocumento15 páginasCuadriláterosEmily CanalesAún no hay calificaciones
- Razones Trigonometricas de Angulos Agudos para Primeroo de SecundariaDocumento3 páginasRazones Trigonometricas de Angulos Agudos para Primeroo de Secundariafranco jhordan huayra moranAún no hay calificaciones
- 07 - Trigonometria 2024-IDocumento14 páginas07 - Trigonometria 2024-IAtenas Ingreso SeguroAún no hay calificaciones
- Triangulos Problemas para Tercero de SecundariaDocumento5 páginasTriangulos Problemas para Tercero de SecundariajhonatanAún no hay calificaciones
- Trigonometria - 3 - Repaso 1Documento3 páginasTrigonometria - 3 - Repaso 1Prof. Daniel HarpperAún no hay calificaciones
- Geometría 01 PSDocumento4 páginasGeometría 01 PSSamir MQAún no hay calificaciones
- TRIGONOMETRIADocumento2 páginasTRIGONOMETRIAAlanis OrozcoAún no hay calificaciones
- Clase 6 - R.T. de Un Ángulo AgudoDocumento2 páginasClase 6 - R.T. de Un Ángulo AgudoBrandon Davison Quiñonez RomeroAún no hay calificaciones
- Triangulos PropiedadesDocumento5 páginasTriangulos PropiedadesNizama Steven Sj'sAún no hay calificaciones
- CC - PPT - Circunferencia y CírculoDocumento44 páginasCC - PPT - Circunferencia y CírculoJuanito peñaAún no hay calificaciones
- Teoria de RazonesDocumento2 páginasTeoria de RazonesCelia RodriguezAún no hay calificaciones
- Raz. Trig. de Angulos Agudos IIDocumento3 páginasRaz. Trig. de Angulos Agudos IISergio Lamas RosalesAún no hay calificaciones
- Mat 8u1Documento46 páginasMat 8u1Mario CardozaAún no hay calificaciones
- Libro de Matemática 7Documento67 páginasLibro de Matemática 7Jorge PichilingueAún no hay calificaciones
- Librito de TrigoDocumento41 páginasLibrito de TrigoJorge PichilingueAún no hay calificaciones
- Guia de Implementacion Del Curriculo de Matematica PDFDocumento274 páginasGuia de Implementacion Del Curriculo de Matematica PDFJmpm Jm JylAún no hay calificaciones
- Triángulos Semejantes EN WORDDocumento5 páginasTriángulos Semejantes EN WORDgolman_275077Aún no hay calificaciones
- Tarea 10 CartografiaDocumento11 páginasTarea 10 CartografiaKenlly FC JorkenAún no hay calificaciones
- Problemas de La Aplicacion A La MecanicaDocumento3 páginasProblemas de La Aplicacion A La MecanicaLuceroM.OlivaresAún no hay calificaciones
- 2do Intento Fisica 2 - Examen Parcial - Semana 4Documento6 páginas2do Intento Fisica 2 - Examen Parcial - Semana 4DELIA0% (1)
- Recuperación Al Instante de Reactivo 01 L00399357 1718922691 CATAGÑA LUGMAÑA RONALD HOMERO - AsdDocumento33 páginasRecuperación Al Instante de Reactivo 01 L00399357 1718922691 CATAGÑA LUGMAÑA RONALD HOMERO - AsdRonald CatagñaAún no hay calificaciones
- Dibujo en 3d en AutocadDocumento48 páginasDibujo en 3d en AutocadSebastian Martinez CuautencoAún no hay calificaciones
- VECTORES2D2012Documento6 páginasVECTORES2D2012Raul DiazAún no hay calificaciones
- 7 Generacion TrayectoriasDocumento53 páginas7 Generacion TrayectoriasJean Carlo Játiva CervantesAún no hay calificaciones
- Plantilla Cuadro Sinoptico WordDocumento1 páginaPlantilla Cuadro Sinoptico WordAlexandra PonceAún no hay calificaciones
- Geométria Analítica-Ejercicos - Unos Resueltos.Documento8 páginasGeométria Analítica-Ejercicos - Unos Resueltos.Mauricio Rubiano SierraAún no hay calificaciones
- Diseño Geometrico de Carreteras #2Documento19 páginasDiseño Geometrico de Carreteras #2Denis Centurion VallejosAún no hay calificaciones
- Trabajo Práctico TrigonometríaDocumento3 páginasTrabajo Práctico TrigonometríaSilvina SchnidrigAún no hay calificaciones
- RcionalidadDocumento17 páginasRcionalidadLaura GomezAún no hay calificaciones
- Unidad - 5 - EM - 9 - Cinemática de Engranajes - Ejes ParalelosDocumento186 páginasUnidad - 5 - EM - 9 - Cinemática de Engranajes - Ejes ParalelosPetronel SchoemanAún no hay calificaciones
- Informe de Laboratorio. Ciencias NaturalesDocumento3 páginasInforme de Laboratorio. Ciencias NaturalesEmmanuel VasquezAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 Segundo Bloque-Ciencias Basicas - Calculo III - (Grupo b05)Documento4 páginasActividad de Puntos Evaluables - Escenario 2 Segundo Bloque-Ciencias Basicas - Calculo III - (Grupo b05)Ricardo PulecioAún no hay calificaciones
- Geometría Analítica Cónicas Versión PDFDocumento52 páginasGeometría Analítica Cónicas Versión PDFRoda RodaAún no hay calificaciones
- TRILATERACION AgregadoDocumento21 páginasTRILATERACION AgregadoMoisés Moiko Guillen100% (2)
- Aproximación Por Mínimos CuadradosDocumento25 páginasAproximación Por Mínimos CuadradosFabian SerafiniAún no hay calificaciones
- 3.2 Fuerzas Hidrostáticas, Magnitud, Valor y Formas Geometricas ComunesDocumento2 páginas3.2 Fuerzas Hidrostáticas, Magnitud, Valor y Formas Geometricas ComunesSamuel David Duque ZapataAún no hay calificaciones
- Investigacion PolígonosDocumento24 páginasInvestigacion PolígonosMelany Camey100% (1)
- Curvas Espirales de TransiciónDocumento7 páginasCurvas Espirales de TransiciónAlexander LimonesAún no hay calificaciones
- (Template) Prac Algebra Vectorial 2020 02Documento6 páginas(Template) Prac Algebra Vectorial 2020 02diegoAún no hay calificaciones
- Matematicas de OctavoDocumento28 páginasMatematicas de OctavoMaria MartinezAún no hay calificaciones
- Redes de Bravais Sistema OrtorrombicoDocumento8 páginasRedes de Bravais Sistema OrtorrombicoJosue Abimelekh Torales CervantesAún no hay calificaciones
- Espacio de HilbertDocumento8 páginasEspacio de HilbertJulian Alexander Manosalva ManriqueAún no hay calificaciones
- 1 Mmp. Silabo - Dibujo Tecnico FlavisurDocumento4 páginas1 Mmp. Silabo - Dibujo Tecnico FlavisurCristiam QuispeAún no hay calificaciones
- Evaluación A La Cobertura Curricular Priorizada 8º Básico - Nivel 1 EstablecimietoDocumento2 páginasEvaluación A La Cobertura Curricular Priorizada 8º Básico - Nivel 1 EstablecimietoRosa Adriana Raiman AlecoyAún no hay calificaciones
- MRUVDocumento3 páginasMRUVAlmer ColladoAún no hay calificaciones