0% encontró este documento útil (0 votos)
282 vistas16 páginasMotor PWM
El documento describe un proyecto de un circuito PWM para controlar un motor DC realizado por estudiantes del IPN. Explica brevemente qué es un PWM, su historia y aplicaciones como control de velocidad de motores y regulación de voltaje. Luego detalla los componentes, diagrama y pruebas realizadas para construir un circuito PWM basado en el temporizador NE555 que controla la velocidad de un motor DC.
Cargado por
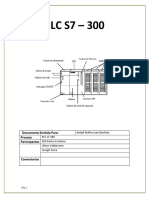
Mendoza Martínez José LuisDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
282 vistas16 páginasMotor PWM
El documento describe un proyecto de un circuito PWM para controlar un motor DC realizado por estudiantes del IPN. Explica brevemente qué es un PWM, su historia y aplicaciones como control de velocidad de motores y regulación de voltaje. Luego detalla los componentes, diagrama y pruebas realizadas para construir un circuito PWM basado en el temporizador NE555 que controla la velocidad de un motor DC.
Cargado por
Mendoza Martínez José LuisDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd