También podría gustarte
- Ejercicios resueltos de microeconomía intermedia: Óptimo del productorDe EverandEjercicios resueltos de microeconomía intermedia: Óptimo del productorAún no hay calificaciones
- Metodo de TransportesDocumento59 páginasMetodo de TransportesAniet kimAún no hay calificaciones
- Modelo de Transporte y Transbordo M.C.Documento7 páginasModelo de Transporte y Transbordo M.C.Maria Caridad Andrad Mier100% (1)
- MODELOS de TRANSPORTE y Asignacion y Analis SensibleDocumento62 páginasMODELOS de TRANSPORTE y Asignacion y Analis SensibleJaquelin J SoArAún no hay calificaciones
- Modelo de TransporteDocumento5 páginasModelo de Transportegeoconda toalaAún no hay calificaciones
- Algorit de Transporte.Documento42 páginasAlgorit de Transporte.Aniet kimAún no hay calificaciones
- Transport e PDFDocumento56 páginasTransport e PDFCatalinaAún no hay calificaciones
- Metodo de Transporte Parte 1 UltimaDocumento42 páginasMetodo de Transporte Parte 1 UltimaDaniel Arteaga BlasAún no hay calificaciones
- ModeloDeTransporteDocumento36 páginasModeloDeTransporteSaray Fernández SaavedraAún no hay calificaciones
- El Problema de Transporte Y Asignacion: O O O D D DDocumento16 páginasEl Problema de Transporte Y Asignacion: O O O D D Dvivanco echaccaya ingmarAún no hay calificaciones
- Metodo de Transporte Parte 1Documento41 páginasMetodo de Transporte Parte 1MiltonMariñosAún no hay calificaciones
- Modelo de TransporteDocumento60 páginasModelo de TransporteFernando Jorge Gomez SulcaAún no hay calificaciones
- Modelo de TransporteDocumento19 páginasModelo de Transportefrancy viviana ramirez carantonAún no hay calificaciones
- TransportDocumento16 páginasTransportAldair PAAún no hay calificaciones
- Modelo de Transporte 2Documento4 páginasModelo de Transporte 2geoconda toalaAún no hay calificaciones
- Modelo de DistribucionDocumento6 páginasModelo de DistribucionVero NoriegaAún no hay calificaciones
- Métodos de Transporte y Asignación en Investigación de Operaciones IDocumento15 páginasMétodos de Transporte y Asignación en Investigación de Operaciones IAmerica Cardenas OntonAún no hay calificaciones
- Modelo de Transporte PDFDocumento38 páginasModelo de Transporte PDFNancy Flor P ChAún no hay calificaciones
- Guia 5 IOP I PDFDocumento17 páginasGuia 5 IOP I PDFNapoJrPerezAún no hay calificaciones
- Metodo TransporteDocumento34 páginasMetodo TransportepaulaAún no hay calificaciones
- Clases 19-24 Transporte IOPDocumento11 páginasClases 19-24 Transporte IOPRog MarzAún no hay calificaciones
- Inv Oper1 Unidad 4 AlumnosDocumento10 páginasInv Oper1 Unidad 4 AlumnosMartín KuinbertAún no hay calificaciones
- Guía Transporte - TransbordoDocumento23 páginasGuía Transporte - TransbordoDanilo RomeroAún no hay calificaciones
- Iopertivab1 141013212808 Conversion Gate01Documento247 páginasIopertivab1 141013212808 Conversion Gate01Midwar HenryAún no hay calificaciones
- Invg Operaciones - 2aed - 07 PDFDocumento46 páginasInvg Operaciones - 2aed - 07 PDFArroyo Sosa NiltonAún no hay calificaciones
- Método de transporte para distribución de productosDocumento3 páginasMétodo de transporte para distribución de productosJuan CarlosAún no hay calificaciones
- Transporte y AsignaciónDocumento4 páginasTransporte y AsignaciónmjddavilaAún no hay calificaciones
- 09cap6 ModeloDeTransporteDocumento52 páginas09cap6 ModeloDeTransporteEloy PonceAún no hay calificaciones
- Método de Transporte y AsignaciónDocumento31 páginasMétodo de Transporte y AsignaciónHector Martinez Rubin Celis100% (2)
- Modelo de Transporte e Investigacion PDFDocumento23 páginasModelo de Transporte e Investigacion PDFpepe carsAún no hay calificaciones
- Modelo transporte mín costo envío autos plantas distribuidorasDocumento23 páginasModelo transporte mín costo envío autos plantas distribuidorasMau ZRAún no hay calificaciones
- Introducción: Investigación de OperacionesDocumento23 páginasIntroducción: Investigación de Operacionespepe carsAún no hay calificaciones
- Investigacion de Operaciones PDFDocumento23 páginasInvestigacion de Operaciones PDFpepe carsAún no hay calificaciones
- Problemas de Transportes PDFDocumento55 páginasProblemas de Transportes PDFMiguel PalaciosAún no hay calificaciones
- Modelo de Transporte OptimizadoDocumento28 páginasModelo de Transporte OptimizadoMontes Villca Jhosseline SoniaAún no hay calificaciones
- Semana Problema de Transporte y Asignacion Programacion EnteraDocumento27 páginasSemana Problema de Transporte y Asignacion Programacion Enteraeduardo quispeAún no hay calificaciones
- Formulacion IODocumento4 páginasFormulacion IOWiLliam RdzAún no hay calificaciones
- SESION 5 Modelos Asignacion y TransporteDocumento32 páginasSESION 5 Modelos Asignacion y TransporteBRANDON ALEXIS GOMEZ BARILLASAún no hay calificaciones
- Modelo de transporte para asignación de energía eléctrica entre plantas y ciudadesDocumento8 páginasModelo de transporte para asignación de energía eléctrica entre plantas y ciudadesIvette Jurado LozanoAún no hay calificaciones
- 09cap6 ModeloDeTransporteDocumento52 páginas09cap6 ModeloDeTransporteElmer-CamperoAún no hay calificaciones
- TransporteDocumento52 páginasTransporteRivera ManuelAún no hay calificaciones
- Problema de transporte: minimizando costos de distribuciónDocumento2 páginasProblema de transporte: minimizando costos de distribuciónernesto cahunAún no hay calificaciones
- Modelo de transporte optimizadoDocumento33 páginasModelo de transporte optimizadoEstefani SuyoAún no hay calificaciones
- 3 - Transporte y AsignaciónDocumento47 páginas3 - Transporte y AsignaciónMaximiliano KrauseAún no hay calificaciones
- Modelado Del Problema de TransporteDocumento18 páginasModelado Del Problema de TransporteJesus Alvites LopezAún no hay calificaciones
- Problemas de TransportesDocumento56 páginasProblemas de TransportesJosé Luis ArceAún no hay calificaciones
- Modelo de Transporte en Xpress IVEDocumento17 páginasModelo de Transporte en Xpress IVEJefferson RondonAún no hay calificaciones
- TransporteDocumento9 páginasTransporteDiana Puma FalcónAún no hay calificaciones
- Tema6 Converted by AbcdpdfDocumento30 páginasTema6 Converted by Abcdpdflion300711Aún no hay calificaciones
- Ap3 TransporteDocumento12 páginasAp3 Transportediego_xpAún no hay calificaciones
- Tema 2Documento27 páginasTema 2Sara CarrilloAún no hay calificaciones
- Analisis de Sensibilidad 5Documento63 páginasAnalisis de Sensibilidad 5Alondra AlexandraAún no hay calificaciones
- Modelos de transporte y redesDocumento26 páginasModelos de transporte y redesArlenAún no hay calificaciones
- Modelo de Programacion LinealDocumento61 páginasModelo de Programacion LinealSamuel OrtegaAún no hay calificaciones
- Programacion Lineal 1Documento33 páginasProgramacion Lineal 1David Rodriguez100% (1)
- Diapositivas Método de TransporteDocumento12 páginasDiapositivas Método de TransporteWendy De La CruzAún no hay calificaciones
- Transporte PDFDocumento51 páginasTransporte PDFJoaquínCernaDíazAún no hay calificaciones
- Clases 4, 5, 6, 7 y 8 ResueltaDocumento17 páginasClases 4, 5, 6, 7 y 8 ResueltaKevin RamirezAún no hay calificaciones
- Modelos de Transporte, Asignación y Transbordo.Documento10 páginasModelos de Transporte, Asignación y Transbordo.Jhon Guido Machco Ciriaco40% (5)
- Trabajo de GradoDocumento18 páginasTrabajo de GradoJan LucasAún no hay calificaciones
- Tema 2 - FrecuenciasDocumento19 páginasTema 2 - FrecuenciasJan LucasAún no hay calificaciones
- Análisis sensibilidad modelos linealesDocumento17 páginasAnálisis sensibilidad modelos linealesJan LucasAún no hay calificaciones
- Tema Mercado de Seguros CompletoDocumento31 páginasTema Mercado de Seguros CompletoJan LucasAún no hay calificaciones
- ROLES DE COMPRA Nestor J - 070128Documento6 páginasROLES DE COMPRA Nestor J - 070128Jan LucasAún no hay calificaciones
- Tema 12 Financiamiento Del RiesgoDocumento14 páginasTema 12 Financiamiento Del RiesgoJan LucasAún no hay calificaciones
- Tema 11 Nociones Fundamentales Del RiesgoDocumento18 páginasTema 11 Nociones Fundamentales Del RiesgoJan LucasAún no hay calificaciones
- Circuito Cerrado de TVDocumento7 páginasCircuito Cerrado de TVLuis AcevedoAún no hay calificaciones
- Prototipo HistoriaDocumento5 páginasPrototipo HistoriaJeanpierre LlerenaAún no hay calificaciones
- PTS Control Pre-GateDocumento3 páginasPTS Control Pre-GateAndrés Venegas ZepedaAún no hay calificaciones
- Consorcio San PedroDocumento4 páginasConsorcio San Pedroluis mamaniAún no hay calificaciones
- Diapositivasdefensatesisdesineri 090929215930 Phpapp02Documento37 páginasDiapositivasdefensatesisdesineri 090929215930 Phpapp02Lucia BioscaAún no hay calificaciones
- Tratamientos Específicos Con Reflexologia PodalDocumento7 páginasTratamientos Específicos Con Reflexologia Podalangela_sbAún no hay calificaciones
- Hiperkinesia PosracionalismoDocumento7 páginasHiperkinesia PosracionalismoRodolfo Sepúlveda MoriceAún no hay calificaciones
- Metabolismo Del Grupo Hemo PDFDocumento9 páginasMetabolismo Del Grupo Hemo PDFInes Maria MantillaAún no hay calificaciones
- Qué Es Impacto AmbientalDocumento4 páginasQué Es Impacto AmbientalJose Miño FernandezAún no hay calificaciones
- Fund Fil e His de La Educacion - Tarea 6Documento4 páginasFund Fil e His de La Educacion - Tarea 6Isidro Jose MendezAún no hay calificaciones
- Friedrich NietzscheDocumento24 páginasFriedrich NietzscheNekoAún no hay calificaciones
- Taller de Morfología ListoDocumento12 páginasTaller de Morfología Listotuliogamer XAún no hay calificaciones
- La DisciplinaDocumento3 páginasLa DisciplinaRoman Cisneros GasparAún no hay calificaciones
- Virus - TRABAJO GRUPAL Biología2Documento18 páginasVirus - TRABAJO GRUPAL Biología2Robert SalinasAún no hay calificaciones
- Cálculo Y Dilución de Medicamentos Adultos Medicamento Phu Osmolaridad Estabilidad T 1/2 Antídoto VolúmenDocumento21 páginasCálculo Y Dilución de Medicamentos Adultos Medicamento Phu Osmolaridad Estabilidad T 1/2 Antídoto VolúmenYerania Fernandez OreaAún no hay calificaciones
- Competencias Textuales Curso de Redaccio PDFDocumento1 páginaCompetencias Textuales Curso de Redaccio PDFAndrés SánchezAún no hay calificaciones
- 04 Los Valores Humanos PDFDocumento2 páginas04 Los Valores Humanos PDFvidumontenegroAún no hay calificaciones
- Grupo 06 Practica N. 03 EstadisticaDocumento25 páginasGrupo 06 Practica N. 03 EstadisticaMaria Fernanda Acosta MontoyaAún no hay calificaciones
- Di Napoli Tomo II SICOLOGÍA-GNOSEOLOGÍA-ONTOLOGÍADocumento341 páginasDi Napoli Tomo II SICOLOGÍA-GNOSEOLOGÍA-ONTOLOGÍAAnonymous 7vxFDxAún no hay calificaciones
- Resumen de Articulo Cientifico AntibioticosDocumento2 páginasResumen de Articulo Cientifico AntibioticosSALUD OCUPACIONAL HHUTAún no hay calificaciones
- Hoja de Trabajo Potencia MecánicaDocumento1 páginaHoja de Trabajo Potencia MecánicaMilitoo CalelAún no hay calificaciones
- 0547 Rela Act y Ret 18jun 562Documento11 páginas0547 Rela Act y Ret 18jun 562Richard CorralesAún no hay calificaciones
- Datos para Infografía de AliExpressDocumento4 páginasDatos para Infografía de AliExpressSantiago HerreraAún no hay calificaciones
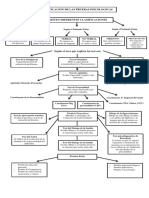
- Esquema - Clasificacion de Las Pruebas PsicologicasDocumento1 páginaEsquema - Clasificacion de Las Pruebas PsicologicasPoetaMelodyAún no hay calificaciones
- Jimenez PDFDocumento338 páginasJimenez PDFRuben GonzalezAún no hay calificaciones
- RelazioneTecnica 20220223083131Documento1 páginaRelazioneTecnica 20220223083131ANTONIO ROSARIO ESCUDEROAún no hay calificaciones
- TERMODocumento3 páginasTERMOFransDoryamVargasFloresAún no hay calificaciones
- Tabla de Calculo de Redes de Distribucion de Agua Potable Método de ManningDocumento7 páginasTabla de Calculo de Redes de Distribucion de Agua Potable Método de ManningLizbeth SantosAún no hay calificaciones
- Modelo SqaDocumento4 páginasModelo Sqaapi-250468751100% (1)
- Paso 5 - Implementación de La Propuesta y SistematizaciónDocumento26 páginasPaso 5 - Implementación de La Propuesta y SistematizaciónLUCY VILORIA100% (1)