También podría gustarte
- Estadistica Puntos Extras 3 PDFDocumento2 páginasEstadistica Puntos Extras 3 PDFEsdras100% (1)
- Eje 3 Ecuaciones DiferencialesDocumento7 páginasEje 3 Ecuaciones DiferencialesLuisa Fernandez Florez100% (1)
- Uni. 3 Actividad 2. Cálculo de Pendientes en Problemas RealesDocumento2 páginasUni. 3 Actividad 2. Cálculo de Pendientes en Problemas RealesMayte Zavala100% (1)
- Baterifa - Practica #4 IV. Factores Integrantes Por Simple InspeccionDocumento7 páginasBaterifa - Practica #4 IV. Factores Integrantes Por Simple InspeccionGabriel MccartyAún no hay calificaciones
- Formulario de Física ClásicaDocumento5 páginasFormulario de Física Clásicachristopher chavezAún no hay calificaciones
- Capitulo 2 L1 (03-08-22) PDFDocumento38 páginasCapitulo 2 L1 (03-08-22) PDFFanny MartínezAún no hay calificaciones
- Sistema 11ecuacionesDocumento6 páginasSistema 11ecuacionesnelson miguel lopez aguileraAún no hay calificaciones
- Formulas de Cinematica - 0Documento2 páginasFormulas de Cinematica - 0Angel Mendez TamayoAún no hay calificaciones
- En Un Canal Abierto Lo Normal Es Que El Flujo Sea PermanenteDocumento7 páginasEn Un Canal Abierto Lo Normal Es Que El Flujo Sea PermanentealexAún no hay calificaciones
- Tabla Resumen OscilacionesDocumento1 páginaTabla Resumen OscilacionesLeo AgüeroAún no hay calificaciones
- Pauta Control 1 MAT-024Documento3 páginasPauta Control 1 MAT-024fefahernandezzzAún no hay calificaciones
- Taller OndasDocumento7 páginasTaller OndasJonathan ReyesAún no hay calificaciones
- Ecuaciones 3 EjeDocumento4 páginasEcuaciones 3 Ejekqzvy49q6vAún no hay calificaciones
- Cinemática en 2D: Posición, velocidad y aceleración de objetos en movimiento bidimensionalDocumento6 páginasCinemática en 2D: Posición, velocidad y aceleración de objetos en movimiento bidimensionalMATÍAS LABBÉAún no hay calificaciones
- Taller 2 Mecanica NewtonianaDocumento2 páginasTaller 2 Mecanica NewtonianaMaria Cecilia FernandezAún no hay calificaciones
- Tarea 2 Transferencia de Calor 1Documento13 páginasTarea 2 Transferencia de Calor 1Juan José Leiva AlegreAún no hay calificaciones
- Tablas 10.2 BirdDocumento3 páginasTablas 10.2 BirdLizbeth Alejandra Rodriguez MoralesAún no hay calificaciones
- Material ApoyoDocumento5 páginasMaterial ApoyoanxocomenepesAún no hay calificaciones
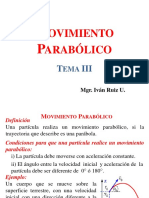
- Movimiento ParabolicoDocumento5 páginasMovimiento ParabolicoDomenica VásquezAún no hay calificaciones
- Ep - Lec 3Documento6 páginasEp - Lec 3Gabriel EstradaAún no hay calificaciones
- Tema1 - ResumenDocumento11 páginasTema1 - ResumenLeonardo Portela AlfaroAún no hay calificaciones
- ecuaciones 3Documento6 páginasecuaciones 3mpaez43Aún no hay calificaciones
- Ecuación diferencial homogénea de orden cero resuelta mediante cambio de variableDocumento2 páginasEcuación diferencial homogénea de orden cero resuelta mediante cambio de variableJosué David Regalado LópezAún no hay calificaciones
- Solución general para circuitos RC y RLDocumento2 páginasSolución general para circuitos RC y RLMafe AlcalaAún no hay calificaciones
- Calculo Diferencial e Integral AvanzadoDocumento2 páginasCalculo Diferencial e Integral AvanzadoKevin EnderAún no hay calificaciones
- Capitulo-3 Conducción Al 6sept2023Documento26 páginasCapitulo-3 Conducción Al 6sept2023frajoahuAún no hay calificaciones
- Cinemática Unidimensional 3 NovDocumento20 páginasCinemática Unidimensional 3 NovGerardo Alberto Ramos LopesAún no hay calificaciones
- Capa Limite20-IDocumento31 páginasCapa Limite20-IMarco GutierrezAún no hay calificaciones
- De FisicaDocumento3 páginasDe FisicaLuis GonzalezAún no hay calificaciones
- Movimiento ParabolicoDocumento9 páginasMovimiento ParabolicoDaphne JH MalikAún no hay calificaciones
- Pract1 PDFDocumento16 páginasPract1 PDFnicoAún no hay calificaciones
- Álgebra Lineal I - Transformaciones LinealesDocumento14 páginasÁlgebra Lineal I - Transformaciones LinealesJosué David Regalado LópezAún no hay calificaciones
- Trabajo de Fenomenos - 14-07Documento11 páginasTrabajo de Fenomenos - 14-07Quirod JavierAún no hay calificaciones
- Cuestiones Resueltas Cap 2Documento29 páginasCuestiones Resueltas Cap 2DIANA ESTEFANIA QUINDE SANTANDERAún no hay calificaciones
- Oscilaciones y OndasDocumento2 páginasOscilaciones y OndasEdward RinconAún no hay calificaciones
- Flujo en ConductosDocumento20 páginasFlujo en ConductosalexAún no hay calificaciones
- Formulario Mec-Fluid.Documento3 páginasFormulario Mec-Fluid.Jose Chale PucAún no hay calificaciones
- Parcial Primer CorteDocumento10 páginasParcial Primer Corteoctavio sarmientoAún no hay calificaciones
- Proyecto Final Análisis y Métodos NuméricosDocumento7 páginasProyecto Final Análisis y Métodos NuméricosalexAún no hay calificaciones
- N4Documento3 páginasN4Doko BitoAún no hay calificaciones
- Preguntas Orientadoras Acerca de La CinemáticaDocumento4 páginasPreguntas Orientadoras Acerca de La Cinemáticavegaelver25Aún no hay calificaciones
- Problema 2 Tarea Fenomenos de TransporteDocumento9 páginasProblema 2 Tarea Fenomenos de TransportefelipeAún no hay calificaciones
- MMC Problemas 2002Documento222 páginasMMC Problemas 2002Jimmy Enriquez Dueñas100% (1)
- Ecuacion de OndaDocumento5 páginasEcuacion de OndaLolito KantAún no hay calificaciones
- TRANSFORMACIONES LINEALESDocumento6 páginasTRANSFORMACIONES LINEALESGeorge Contreras HernandezAún no hay calificaciones
- Clase ACparteIDocumento20 páginasClase ACparteIcachoAún no hay calificaciones
- Problema Nº14 Bce MicroscopicoDocumento4 páginasProblema Nº14 Bce MicroscopicoSilvina ToffoloAún no hay calificaciones
- ECUACIONES CINEMATICAS CURSO Mruv y Caida LibreDocumento1 páginaECUACIONES CINEMATICAS CURSO Mruv y Caida LibreCaballitofelizAún no hay calificaciones
- 3eval 2009Documento4 páginas3eval 2009Joel PeraltaAún no hay calificaciones
- Formulario Cinemática y DinámicaDocumento10 páginasFormulario Cinemática y DinámicaRodolfo RamirezAún no hay calificaciones
- Ejemplos TensoresDocumento4 páginasEjemplos TensoresDoctor CaguamónAún no hay calificaciones
- Capa Limite HidrodinamicaDocumento5 páginasCapa Limite HidrodinamicaCinthia BautistaAún no hay calificaciones
- FormularioDocumento2 páginasFormularioJonathan G. SánchezAún no hay calificaciones
- Curva de intersección esfera-plano y recta tangenteDocumento12 páginasCurva de intersección esfera-plano y recta tangenteBenjamín GonzálezAún no hay calificaciones
- ContinuidadDocumento2 páginasContinuidadNataly Elizabeth López AvelarAún no hay calificaciones
- Fisica Euler Formulario 02 230901 151633Documento2 páginasFisica Euler Formulario 02 230901 151633Darwin BaguiAún no hay calificaciones
- Mecánica Estadística IIDocumento4 páginasMecánica Estadística IIAnonymous 5Mj54NyTXfAún no hay calificaciones
- Movimiento proyectiles curso físicaDocumento11 páginasMovimiento proyectiles curso físicaLuis HerreraAún no hay calificaciones
- Física Tema 7 Movimiento en Dos Dimensiones Con Aceleración Constante Versión PDFDocumento11 páginasFísica Tema 7 Movimiento en Dos Dimensiones Con Aceleración Constante Versión PDFRonald SamuelAún no hay calificaciones
- Apuntes de Clases EDPs - Separación de Variables PDFDocumento17 páginasApuntes de Clases EDPs - Separación de Variables PDFdiegoAún no hay calificaciones
- Cinemática de la Partícula: Movimientos Rectilíneos, Parabólico, Curvilíneo y Coordenadas CilíndricasDocumento1 páginaCinemática de la Partícula: Movimientos Rectilíneos, Parabólico, Curvilíneo y Coordenadas CilíndricasLUIS ALEXANDER PULLOQUINGA ESCOBARAún no hay calificaciones
- Cinética Química Aplicada - Problemas PDFDocumento1849 páginasCinética Química Aplicada - Problemas PDFGreciaAnicetoAún no hay calificaciones
- Guia de Trabajo Mate en 1 y 2 Jugadas de Taller RR-189 Ajedrez Ii UnidadDocumento53 páginasGuia de Trabajo Mate en 1 y 2 Jugadas de Taller RR-189 Ajedrez Ii UnidadMoisés MedinaAún no hay calificaciones
- Exposicion de AdministraciónDocumento11 páginasExposicion de AdministraciónMoisés MedinaAún no hay calificaciones
- Ejercicio Unidad10Documento26 páginasEjercicio Unidad10Moisés MedinaAún no hay calificaciones
- Grupo4 Actividad11Documento20 páginasGrupo4 Actividad11Moisés MedinaAún no hay calificaciones
- Clasificación modelos simulaciónDocumento5 páginasClasificación modelos simulaciónnelson orduzAún no hay calificaciones
- Diseño curricular en ensayo para Educación Media Diversificada y Profesional en VenezuelaDocumento78 páginasDiseño curricular en ensayo para Educación Media Diversificada y Profesional en VenezuelaJosé Jiménez0% (1)
- Apunte de Contenido Modelos de Optimización Paramétrica: UGM Escuela de Tecnología y Negocios Santiago, Chile 2022Documento14 páginasApunte de Contenido Modelos de Optimización Paramétrica: UGM Escuela de Tecnología y Negocios Santiago, Chile 2022KEVIN IGNACIO YISSI MALUENDAAún no hay calificaciones
- Kuo - Sistemas de Control AutomaticoDocumento930 páginasKuo - Sistemas de Control AutomaticoJaIr MaflouAún no hay calificaciones
- Combinatoria IvanDocumento14 páginasCombinatoria IvanedwinAún no hay calificaciones
- Multiplicación de números enteros y fraccionesDocumento110 páginasMultiplicación de números enteros y fraccionesLeonardo Santiago CuevasAún no hay calificaciones
- Laboratorio Excel Estadistico I Clase Del 21 de SeptiembreDocumento12 páginasLaboratorio Excel Estadistico I Clase Del 21 de SeptiembreAngela CastroAún no hay calificaciones
- ACT N 8 MATEMATICAS Construyamos AlgebraDocumento12 páginasACT N 8 MATEMATICAS Construyamos AlgebraPao R PérezAún no hay calificaciones
- Preguntero 2do Parcial MAT VI - REJUNTE DE LOS QUE SIRVENDocumento12 páginasPreguntero 2do Parcial MAT VI - REJUNTE DE LOS QUE SIRVENLazaro PalacioAún no hay calificaciones
- Capitulo I - Vectores en El Plano y en El EspacioDocumento97 páginasCapitulo I - Vectores en El Plano y en El EspacioHolman UtiAún no hay calificaciones
- Análisis modal espectral y tiempo historia NL edificio con aisladoresDocumento21 páginasAnálisis modal espectral y tiempo historia NL edificio con aisladoresCelina AlejandroAún no hay calificaciones
- G8B1C6Documento5 páginasG8B1C6Anahí OsunaAún no hay calificaciones
- Hojas de Ejercicios EDO 2020B EPNDocumento94 páginasHojas de Ejercicios EDO 2020B EPNKAGGHGAún no hay calificaciones
- PDF Tarea 6 QMC Flores Santos Ayrton Tadeo CompressDocumento19 páginasPDF Tarea 6 QMC Flores Santos Ayrton Tadeo CompressANDRES GOMEZNIÑOAún no hay calificaciones
- Ejercicios Mate I-10-16Documento7 páginasEjercicios Mate I-10-16danichacaltanaAún no hay calificaciones
- Taller 2.1Documento1 páginaTaller 2.1carlosAún no hay calificaciones
- Actividad 08 - Analisis I - Franklin Espinoza - Ing. CivilDocumento11 páginasActividad 08 - Analisis I - Franklin Espinoza - Ing. Civilfranklin espinozaAún no hay calificaciones
- Mrua Fundamento ConceptualDocumento2 páginasMrua Fundamento ConceptualElvis LlanesAún no hay calificaciones
- Fucal PC2 AsesDocumento8 páginasFucal PC2 AsesLoida Salvatierra PantojaAún no hay calificaciones
- Informe - Programación Lineal AvanzadaDocumento22 páginasInforme - Programación Lineal AvanzadaDiego ChirinosAún no hay calificaciones
- Unidad 1 Cap 1 Conjuntos, Cap 2 LógicaDocumento30 páginasUnidad 1 Cap 1 Conjuntos, Cap 2 LógicaPaola Andrea Castillo DeviaAún no hay calificaciones
- Tarea Semana 7Documento6 páginasTarea Semana 7Richard Jeferson VDAún no hay calificaciones
- Esquema de Planificador AnualDocumento12 páginasEsquema de Planificador AnualJulio Cesar Medrano SandovalAún no hay calificaciones
- 1-Integrales Impropias-2020-2Documento15 páginas1-Integrales Impropias-2020-2Emmanuel MaldonadoAún no hay calificaciones
- Trabajo Grupal S16 - Equipo 4Documento6 páginasTrabajo Grupal S16 - Equipo 4Cesar Agusto Choque MamaniAún no hay calificaciones
- Unidad 4Documento20 páginasUnidad 4Rosa Isela Rodriguez BosquezAún no hay calificaciones
- Qué Es Un Número en ZDocumento21 páginasQué Es Un Número en Zel weAún no hay calificaciones