También podría gustarte
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Compuertas LogicasDocumento18 páginasCompuertas LogicasOscar ColmenaresAún no hay calificaciones
- Circuito AntireboteDocumento27 páginasCircuito AntireboteEric Dueñas TrujilloAún no hay calificaciones
- Compuertas LógicasDocumento15 páginasCompuertas LógicasDGladysVilchezCAún no hay calificaciones
- Puerto ParaleloDocumento13 páginasPuerto ParaleloJair WandestterAún no hay calificaciones
- Electronica Digital PDFDocumento10 páginasElectronica Digital PDFAulaperu TicAún no hay calificaciones
- Analisis Del Circuito Integrado Ne555Documento3 páginasAnalisis Del Circuito Integrado Ne555Hector ReuterAún no hay calificaciones
- UD.A - PULSADOR CON ARDUINO (Pull-Up y Pull-Down)Documento9 páginasUD.A - PULSADOR CON ARDUINO (Pull-Up y Pull-Down)Patricio Berbel100% (1)
- Electronica Digital AutomocionDocumento27 páginasElectronica Digital AutomocionNano AcAún no hay calificaciones
- Potenciómetro DigitalDocumento9 páginasPotenciómetro DigitalLuis SalauAún no hay calificaciones
- Sensores en Fluid SimDocumento9 páginasSensores en Fluid SimBryanyMariaAún no hay calificaciones
- Resumen #6Documento11 páginasResumen #6Tadeo Perez CruzAún no hay calificaciones
- Electronica DigitalDocumento18 páginasElectronica DigitalVict GonzAún no hay calificaciones
- Programación Ladder PLCDocumento14 páginasProgramación Ladder PLCManuel Andres Ortega AcostaAún no hay calificaciones
- LABORATORIO 6 ELECTRONICA 1 FinDocumento13 páginasLABORATORIO 6 ELECTRONICA 1 FinFabidix NsbrAún no hay calificaciones
- Practicas Con Arduino UNODocumento24 páginasPracticas Con Arduino UNOLeonardo Alvarez100% (1)
- Diagramas de EscaleraDocumento86 páginasDiagramas de EscalerawilliamII100% (1)
- Cómo Utilizar Pulsadores Sin Saber Nada de Electrónica Con ArduinoDocumento6 páginasCómo Utilizar Pulsadores Sin Saber Nada de Electrónica Con ArduinoLuis PalaciosAún no hay calificaciones
- Guia para Docentes y Flias AutomatizacionDocumento67 páginasGuia para Docentes y Flias Automatizacionbedahom66Aún no hay calificaciones
- Dado electrónico con Arduino UnoDocumento5 páginasDado electrónico con Arduino UnoProg InitAún no hay calificaciones
- Electronica Digital AutomocionDocumento27 páginasElectronica Digital AutomocionJuan Carlos Regalado AnguianoAún no hay calificaciones
- Cirucuitos AntireboteDocumento3 páginasCirucuitos AntireboteMauricio AlvarezAún no hay calificaciones
- Expliicacion CorrectaDocumento8 páginasExpliicacion CorrectaLeonardo TelloAún no hay calificaciones
- Semaforo WDocumento9 páginasSemaforo WMannevar Ocupa Flores NarkinAún no hay calificaciones
- Manual Programa Ure ResidenDocumento2 páginasManual Programa Ure ResidenSamuel M QuisbertAún no hay calificaciones
- Electrónica Con TinkerCadDocumento58 páginasElectrónica Con TinkerCadVictor Andrade Soto100% (2)
- Control de Puerta Por PLCDocumento4 páginasControl de Puerta Por PLCMartin Valencia AlejoAún no hay calificaciones
- Sema E2d3 EdDocumento4 páginasSema E2d3 EdSaúl MelendezsAún no hay calificaciones
- Ruleta de La FortunaDocumento29 páginasRuleta de La FortunaMarilyn ParejoAún no hay calificaciones
- Compuertas lógicas en control de motorDocumento8 páginasCompuertas lógicas en control de motorJaime Emanuel Palma HernándezAún no hay calificaciones
- Práctica 4 Uso de PulsadoresDocumento2 páginasPráctica 4 Uso de PulsadoresNigmer 384Aún no hay calificaciones
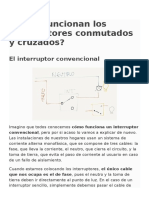
- Cómo funcionan los interruptores convencionales, conmutados y cruzadosDocumento4 páginasCómo funcionan los interruptores convencionales, conmutados y cruzadosandy jasfier timana cruzAún no hay calificaciones
- Conexión y funcionamiento de la ALU 74LS181Documento12 páginasConexión y funcionamiento de la ALU 74LS181Carito LoopAún no hay calificaciones
- Alarma Con Flip FlopsDocumento6 páginasAlarma Con Flip FlopsFernando GarciaAún no hay calificaciones
- Inici PortesDocumento16 páginasInici PortesXavier Guillaumet MarquésAún no hay calificaciones
- Curso Completo de Circuitos IntegradosDocumento40 páginasCurso Completo de Circuitos IntegradosDAYSI MAGALY CONDORI ASPIAún no hay calificaciones
- InstiTec digital y analógicaDocumento14 páginasInstiTec digital y analógicaOliver MartínezAún no hay calificaciones
- Ejemplos Con Salidas AnalógicasDocumento7 páginasEjemplos Con Salidas AnalógicasGabriel aquinoAún no hay calificaciones
- Las Resistencias Pull-UpDocumento3 páginasLas Resistencias Pull-UpANDRES FELIPE VERGARA VARELAAún no hay calificaciones
- Conmutador Sin ReboteDocumento8 páginasConmutador Sin ReboteAdrian JujujuAún no hay calificaciones
- Diagrama LadderDocumento5 páginasDiagrama LadderJose Efrain Rodriguez ValdesAún no hay calificaciones
- Utiliza Un Relé Con Tu Placa ArduinoDocumento4 páginasUtiliza Un Relé Con Tu Placa ArduinoKEVIN RAY FOX UMIYAURI HUAMANIAún no hay calificaciones
- Labo - Circuitos Digitales Timer 555Documento9 páginasLabo - Circuitos Digitales Timer 555Josefo AHAún no hay calificaciones
- Cómo funcionan interruptores conmutados y cruzadosDocumento6 páginasCómo funcionan interruptores conmutados y cruzadoshermesAún no hay calificaciones
- ISSN: 1514-5697 - #268 Argentina: $5900Documento78 páginasISSN: 1514-5697 - #268 Argentina: $5900Antonio AscanioAún no hay calificaciones
- 9 Reactancia Electrónica CompletaDocumento16 páginas9 Reactancia Electrónica CompletaCone TecuaniAún no hay calificaciones
- Informe 4 PIACDocumento7 páginasInforme 4 PIACbaylandAún no hay calificaciones
- Lección 19Documento17 páginasLección 19PEDRO ARMANDO VALDIVIESO ALCALDEAún no hay calificaciones
- Laboratorio 1 Circuitos Combinacionales. (Lógica Digital)Documento8 páginasLaboratorio 1 Circuitos Combinacionales. (Lógica Digital)Luis Angel Moscote DiazAún no hay calificaciones
- Fluids ImDocumento8 páginasFluids ImJosho SandovalAún no hay calificaciones
- Parctica 1 - Circuitos LogicosDocumento10 páginasParctica 1 - Circuitos LogicosNayeli MoralesAún no hay calificaciones
- Electrónica digital y puertas lógicas para automociónDocumento27 páginasElectrónica digital y puertas lógicas para automociónRommel TorocahuaAún no hay calificaciones
- Circuito elemental: aprendiendo sobre voltaje, interruptores y mediciones básicasDocumento5 páginasCircuito elemental: aprendiendo sobre voltaje, interruptores y mediciones básicasSalomonTorresSotoAún no hay calificaciones
- TRABAJO ESCRITO PulsadoresDocumento11 páginasTRABAJO ESCRITO PulsadoresAlex J. Prieto GuzmánAún no hay calificaciones
- Decodificador (Display)Documento10 páginasDecodificador (Display)1b1ack1ionsAún no hay calificaciones
- Que Es Un DecodificadorDocumento9 páginasQue Es Un DecodificadorIsaacnia MajanoAún no hay calificaciones
- 100 Circuitos de Proyectos EducacionalesDe Everand100 Circuitos de Proyectos EducacionalesCalificación: 5 de 5 estrellas5/5 (2)
- UASD Servicios y Controles Automaticos Introduccion Sistemas de ControlDocumento5 páginasUASD Servicios y Controles Automaticos Introduccion Sistemas de ControlGabriel aquinoAún no hay calificaciones
- Gabriel IEM 5190 - Investigacion IndividualDocumento3 páginasGabriel IEM 5190 - Investigacion IndividualGabriel aquinoAún no hay calificaciones
- IndiceDocumento3 páginasIndiceGabriel aquinoAún no hay calificaciones
- Ejercicios de La Unidad I de Estadistica DescriptivaDocumento2 páginasEjercicios de La Unidad I de Estadistica DescriptivaGabriel aquinoAún no hay calificaciones
- Practica de Lab. de Electricidad - Resistencia TotalDocumento5 páginasPractica de Lab. de Electricidad - Resistencia TotalGabriel aquinoAún no hay calificaciones
- UASD Servicios y Controles Automaticos Introduccion Sistemas de ControlDocumento5 páginasUASD Servicios y Controles Automaticos Introduccion Sistemas de ControlGabriel aquinoAún no hay calificaciones
- Unidad 1 - El Amplificador OperacionalDocumento20 páginasUnidad 1 - El Amplificador OperacionalGabriel aquinoAún no hay calificaciones
- Ingenieria Electromecanica Mencion ElectronicaDocumento4 páginasIngenieria Electromecanica Mencion ElectronicaGabriel aquinoAún no hay calificaciones
- Gabriel IEM 5090 - Practica No.1Documento20 páginasGabriel IEM 5090 - Practica No.1Gabriel aquinoAún no hay calificaciones
- Medición de potencia eléctrica en circuitos monofásicos usando vatímetroDocumento17 páginasMedición de potencia eléctrica en circuitos monofásicos usando vatímetroGabriel aquinoAún no hay calificaciones
- Estereoscopia 1Documento16 páginasEstereoscopia 1Gabriel aquinoAún no hay calificaciones
- Selector de Canales Digitales: Partes y FuncionamientoDocumento8 páginasSelector de Canales Digitales: Partes y FuncionamientoGabriel aquinoAún no hay calificaciones
- Unidad 5 - Contador Asincrónico de RizadoDocumento12 páginasUnidad 5 - Contador Asincrónico de RizadoGabriel aquinoAún no hay calificaciones
- Presentation 1Documento1 páginaPresentation 1Gabriel aquinoAún no hay calificaciones
- Lab 15 1Documento9 páginasLab 15 1Gabriel aquinoAún no hay calificaciones
- 2.3 Exp. N 15 El ValtimetroDocumento7 páginas2.3 Exp. N 15 El ValtimetroGabriel aquinoAún no hay calificaciones
- Ing. ELECTRICA 1AA131 A Lab 2.3 EXP 15Documento12 páginasIng. ELECTRICA 1AA131 A Lab 2.3 EXP 15Gabriel aquinoAún no hay calificaciones
- Simulacion de Circuitos U4Documento3 páginasSimulacion de Circuitos U4Gabriel aquinoAún no hay calificaciones
- Unidad 4 - Registro de Desplazamiento de 4 BitsDocumento13 páginasUnidad 4 - Registro de Desplazamiento de 4 BitsGabriel aquinoAún no hay calificaciones
- Unidad 6 - Contador SincrónicoDocumento15 páginasUnidad 6 - Contador SincrónicoGabriel aquinoAún no hay calificaciones
- Unidad 2 - Flip-Flop JKDocumento17 páginasUnidad 2 - Flip-Flop JKGabriel aquinoAún no hay calificaciones
- Dipolos ColinealesDocumento4 páginasDipolos ColinealesAnonymous dYYLURMAún no hay calificaciones
- Unidad 3 - Salida Tri-EstadoDocumento15 páginasUnidad 3 - Salida Tri-EstadoGabriel aquinoAún no hay calificaciones
- Unidad 7 - Control Del Bus de DatosDocumento18 páginasUnidad 7 - Control Del Bus de DatosGabriel aquinoAún no hay calificaciones
- Ejemplo RadiotelefoniaDocumento16 páginasEjemplo RadiotelefoniaGabriel aquinoAún no hay calificaciones
- Minuta de Calculo Informe Diseño VOMDocumento5 páginasMinuta de Calculo Informe Diseño VOMGabriel aquinoAún no hay calificaciones
- Amplificadores de PotenciaDocumento48 páginasAmplificadores de Potenciajean paul callalli Ojeda100% (1)
- Dipolos Ortogonales LineaDocumento5 páginasDipolos Ortogonales LineaGabriel aquinoAún no hay calificaciones
- Antenas 5Documento15 páginasAntenas 5Gabriel aquinoAún no hay calificaciones
- Trabajo de Procesos de Manufactura IEM 3380Documento31 páginasTrabajo de Procesos de Manufactura IEM 3380Gabriel aquinoAún no hay calificaciones
- VOCABULARIONHJDocumento2 páginasVOCABULARIONHJÁngela JennyferAún no hay calificaciones
- Parcial SEGUNDO INTENTO - Escenario 4 PRACTICO - INVESTIGACION DE OPERACIONESDocumento14 páginasParcial SEGUNDO INTENTO - Escenario 4 PRACTICO - INVESTIGACION DE OPERACIONESScarpettaJairoAún no hay calificaciones
- ACH U2 EA4 FormatoDocumento6 páginasACH U2 EA4 FormatoCarlos Reyes71% (14)
- Tarea Individual Vigilancia y ControlDocumento5 páginasTarea Individual Vigilancia y ControlOnice HenriquezAún no hay calificaciones
- Practica Domiciliaria Ii de Fisica 1Documento6 páginasPractica Domiciliaria Ii de Fisica 1LeistonAún no hay calificaciones
- RIDAA Decreto MOP 752 21.7.03 Anexos PDFDocumento64 páginasRIDAA Decreto MOP 752 21.7.03 Anexos PDFKaren GraceAún no hay calificaciones
- Selva Tipos, Fauna, Flora y Sus Características - OVACENDocumento29 páginasSelva Tipos, Fauna, Flora y Sus Características - OVACENerick00009Aún no hay calificaciones
- ST Tiranteria MecanicaDocumento7 páginasST Tiranteria Mecanicajorge morochoAún no hay calificaciones
- PARCIALDocumento23 páginasPARCIALLeonela Sof RomanoAún no hay calificaciones
- Proyecto de ElevadorDocumento58 páginasProyecto de ElevadorAlexander Paiva Temoche100% (4)
- 31° El Mensaje Moral Del Caballero Rosa Cruz - E. .H. . Juan Garcia Chocano, 31°Documento13 páginas31° El Mensaje Moral Del Caballero Rosa Cruz - E. .H. . Juan Garcia Chocano, 31°supremo7100% (1)
- Razonamiento Abductivo en La Lógica Clasica PDFDocumento24 páginasRazonamiento Abductivo en La Lógica Clasica PDFQuaestions100% (2)
- Tips de FraganciasDocumento3 páginasTips de FraganciasDiego Martín VegaAún no hay calificaciones
- Quiz 1 Costos y PresupuestosDocumento7 páginasQuiz 1 Costos y PresupuestosJuan DiazAún no hay calificaciones
- P 009Documento14 páginasP 009lermlermAún no hay calificaciones
- Fuente Regulada 12vDocumento6 páginasFuente Regulada 12vjlAún no hay calificaciones
- Constancia de Situación Fiscal para Ganadería en VeracruzDocumento2 páginasConstancia de Situación Fiscal para Ganadería en VeracruzjoseAún no hay calificaciones
- T. Práctico - Quimica Tec. - SEGURIDAD E HIGIENEDocumento4 páginasT. Práctico - Quimica Tec. - SEGURIDAD E HIGIENECamila Bertral100% (1)
- Plan de Mejora de Los Aprendizajes: ProfDocumento12 páginasPlan de Mejora de Los Aprendizajes: Prof20390 HDDDLCAún no hay calificaciones
- Saloni 2Documento16 páginasSaloni 2api-87295572Aún no hay calificaciones
- Primer Trabajo GRDDocumento14 páginasPrimer Trabajo GRDCuesta Yesid0% (1)
- Exclusion SocialDocumento82 páginasExclusion SocialShirley EspinozaAún no hay calificaciones
- Bienvenida Curso 2020Documento2 páginasBienvenida Curso 2020Daniel LeandroAún no hay calificaciones
- Calculo de FundacionDocumento5 páginasCalculo de FundacionJoseAún no hay calificaciones
- Tipos de códigos de barras y sus componentesDocumento4 páginasTipos de códigos de barras y sus componentesYampier LopezAún no hay calificaciones
- Manual Visual Basic NetDocumento158 páginasManual Visual Basic Netdouglasgm100% (1)
- Trabajo UNSADocumento5 páginasTrabajo UNSAEdwin Diaz AriasAún no hay calificaciones
- Pca 2022-2023 BiologíaDocumento10 páginasPca 2022-2023 BiologíaJuan CarlosAún no hay calificaciones
- La Ley de Educacion Ambiental Integral y La Formacion Docente en GeografiaDocumento14 páginasLa Ley de Educacion Ambiental Integral y La Formacion Docente en GeografiaMelisa EstrellaAún no hay calificaciones
- Vision Sistemica de La Realidad PDFDocumento39 páginasVision Sistemica de La Realidad PDFfbonnaventAún no hay calificaciones