También podría gustarte
- EM M8 A2 Manuel ManjarrezDocumento13 páginasEM M8 A2 Manuel ManjarrezmanuelAún no hay calificaciones
- 10-3 Trigonometria Guia 11Documento4 páginas10-3 Trigonometria Guia 11reneAún no hay calificaciones
- Ejemplo AI1 y AI2Documento7 páginasEjemplo AI1 y AI2Eric QuiñonesAún no hay calificaciones
- Semana 3 Refuerzo 3CC FisicaDocumento4 páginasSemana 3 Refuerzo 3CC FisicaJorge Hernán Esparza CórdovaAún no hay calificaciones
- Unidad IV y V (T.Investigación)Documento35 páginasUnidad IV y V (T.Investigación)Abraham Antonio Lagunes BenitezAún no hay calificaciones
- Taller RegresionDocumento6 páginasTaller RegresionSebastian Pachon RojasAún no hay calificaciones
- Analisis No LinealDocumento21 páginasAnalisis No LinealYony Ari AliAún no hay calificaciones
- Carlos CuartasDocumento46 páginasCarlos Cuartaskarol ximena perlaza villegasAún no hay calificaciones
- AficasDocumento5 páginasAficasMafe SuárezAún no hay calificaciones
- Listado5y6 (Vargas) PDFDocumento14 páginasListado5y6 (Vargas) PDFmiguel angel urzua venegasAún no hay calificaciones
- CUARTA PRÁCTICA (Recuperado Automáticamente)Documento26 páginasCUARTA PRÁCTICA (Recuperado Automáticamente)JOAN JUNIORS ATENCIO VELASQUEZAún no hay calificaciones
- Paper Analisis de RegresionDocumento20 páginasPaper Analisis de RegresionYadira PárragaAún no hay calificaciones
- Tipo de LímitesDocumento14 páginasTipo de LímitesArge bueno castroAún no hay calificaciones
- Autocorrelación de Residuales en Modelos EconométricosDocumento4 páginasAutocorrelación de Residuales en Modelos EconométricosEmilio Sandoval PalominoAún no hay calificaciones
- Taller 2 - Sistema de NivelDocumento6 páginasTaller 2 - Sistema de NivelEstefanía Angel ClavijoAún no hay calificaciones
- Guia Teorica 22 Proporcionalidad - 2024Documento10 páginasGuia Teorica 22 Proporcionalidad - 2024mgonza0126Aún no hay calificaciones
- Interpolacion LinealDocumento6 páginasInterpolacion LinealCarlos CdlcAún no hay calificaciones
- Regresion LinealDocumento6 páginasRegresion Linealreneeperz84Aún no hay calificaciones
- Miguel Cañizares - 18 Notación RelativistaDocumento2 páginasMiguel Cañizares - 18 Notación RelativistaEst EteAún no hay calificaciones
- Regresion LinealDocumento6 páginasRegresion LinealARMANDO JOSUE TOLENTINO ALCALAAún no hay calificaciones
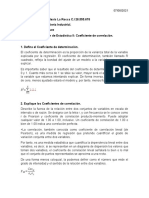
- Evaluacion de Estadistica II - Coeficiente de CorrelacionDocumento13 páginasEvaluacion de Estadistica II - Coeficiente de CorrelacionAlexis RAún no hay calificaciones
- Calculo20 21 Tema4Documento20 páginasCalculo20 21 Tema4AinhoaAún no hay calificaciones
- Ecuaciones Diferenciales Por Variables Separables y Sus Aplicaciones de BernoulliDocumento17 páginasEcuaciones Diferenciales Por Variables Separables y Sus Aplicaciones de BernoulliAlexandra GuaillasAún no hay calificaciones
- Tema4 RegresionDocumento12 páginasTema4 RegresionRUmanzor-89Aún no hay calificaciones
- Análisis de FourierDocumento8 páginasAnálisis de FourierLaura VerdejaAún no hay calificaciones
- PR Actica Calificada 2Documento5 páginasPR Actica Calificada 2joseph navarro choquecahuanaAún no hay calificaciones
- Numero de Oro Recursos Didacticos PDFDocumento12 páginasNumero de Oro Recursos Didacticos PDFgabrielayevAún no hay calificaciones
- Calculo TallerDocumento7 páginasCalculo TallerCésar BermúdezAún no hay calificaciones
- Derivada 1 06 - 2007Documento81 páginasDerivada 1 06 - 2007Edward CardozoAún no hay calificaciones
- 1 - Guía 1 - Ecuaciones Balance de MateriaDocumento6 páginas1 - Guía 1 - Ecuaciones Balance de MateriaKATHERINE DONOSOAAún no hay calificaciones
- Tarea 1 - 100410-1Documento32 páginasTarea 1 - 100410-1Erika GarzonAún no hay calificaciones
- Guia Practica de Ecuaciones Simultaneas - Econometria II-2016-BDocumento23 páginasGuia Practica de Ecuaciones Simultaneas - Econometria II-2016-BLisset Soraya Huamán QuispeAún no hay calificaciones
- Investigacion de Aplicaciones de Las Ecuaciones DiferencialesDocumento19 páginasInvestigacion de Aplicaciones de Las Ecuaciones DiferencialesJUAN DIEGO DUEÑAS FLORESAún no hay calificaciones
- Ecuaciones Diferenciales: Ej Grafico de Campos DireccionalesDocumento3 páginasEcuaciones Diferenciales: Ej Grafico de Campos Direccionalesm.rodriguezbecerraAún no hay calificaciones
- Lec 02 Error TayDocumento8 páginasLec 02 Error TayGreg GaliciaAún no hay calificaciones
- Ajuste de CurvasDocumento9 páginasAjuste de CurvasJhon YajaAún no hay calificaciones
- La Funcion Lineal y La Funcion AfinDocumento15 páginasLa Funcion Lineal y La Funcion AfinChristian Silva FloresAún no hay calificaciones
- Informe Fisica MRUVDocumento8 páginasInforme Fisica MRUVDANIELA GERALDINE ZENTENO MEDINAAún no hay calificaciones
- Interpolación LinealDocumento4 páginasInterpolación LinealJuan ManuelAún no hay calificaciones
- Modelo de Regresión Lineal MúltipleDocumento28 páginasModelo de Regresión Lineal MúltipleOmar Hidalgo100% (2)
- Final SolucionesDocumento3 páginasFinal SolucionesfridagonzalezcabreraAún no hay calificaciones
- 4practica1 PDFDocumento2 páginas4practica1 PDFSofía FernándezAún no hay calificaciones
- INFORME GRAFICOS Y ECUACIONES c4Documento24 páginasINFORME GRAFICOS Y ECUACIONES c4NICOLÉ JHULIANA HERBAS GUZMÁNAún no hay calificaciones
- Sesión 2-Fundamentos de ProgramaciónDocumento20 páginasSesión 2-Fundamentos de ProgramaciónElena ZavaletaAún no hay calificaciones
- Álgebra Del Modelo de Cagan - Notas de ClaseDocumento8 páginasÁlgebra Del Modelo de Cagan - Notas de ClasesantiAún no hay calificaciones
- Presentación Funciones.Documento63 páginasPresentación Funciones.Fayíz Asyizaq Salcedo FonsecaAún no hay calificaciones
- UNIDAD 1: Tablas de Frecuencias: Definición: La Tabla de Frecuencias Es Una Ordenación, en Forma deDocumento6 páginasUNIDAD 1: Tablas de Frecuencias: Definición: La Tabla de Frecuencias Es Una Ordenación, en Forma deBenito M.SAún no hay calificaciones
- Informe 1 - ANALISIS GRAFICODocumento6 páginasInforme 1 - ANALISIS GRAFICOFelipe AriasAún no hay calificaciones
- 3.3. C Alculo TensorialDocumento7 páginas3.3. C Alculo Tensorialjosep saezAún no hay calificaciones
- ACTIVIDAD N 4 - Educacion Matemática - 3er AñoDocumento7 páginasACTIVIDAD N 4 - Educacion Matemática - 3er Año:Thiago:Aún no hay calificaciones
- Ensayo Argumentativo Modelado de Orden Reducido para El Flujo MultifásicoDocumento9 páginasEnsayo Argumentativo Modelado de Orden Reducido para El Flujo MultifásiconallelytomalaAún no hay calificaciones
- Ecuaciones Trabajo 1Documento6 páginasEcuaciones Trabajo 1David VillacisAún no hay calificaciones
- Integral EsDocumento9 páginasIntegral EsIan Villegas ValverdeAún no hay calificaciones
- 11 Formas IndeterminadasDocumento23 páginas11 Formas IndeterminadasENIC-AITCGAún no hay calificaciones
- Bloque 3 (Funciones Polinomiales de Grados Cero, Uno y DosDocumento24 páginasBloque 3 (Funciones Polinomiales de Grados Cero, Uno y DosRo de SantoméAún no hay calificaciones
- Lectura T4 DerivadasDocumento47 páginasLectura T4 DerivadasTristan Villanueva CoutiñoAún no hay calificaciones
- Autovalores y Autovectores IIDocumento8 páginasAutovalores y Autovectores IImercenariuss100% (1)
- FUNCIONES1Documento51 páginasFUNCIONES1djkikeman34Aún no hay calificaciones
- Cronograma Cálculo Diferencial 2020-2 PDFDocumento6 páginasCronograma Cálculo Diferencial 2020-2 PDFMarlon MarinAún no hay calificaciones
- Matematica y Fisica para BachilleratoDocumento19 páginasMatematica y Fisica para BachilleratoJesus Alejandro Cortes OrtaAún no hay calificaciones
- Funciones Complejas Elementales-Series de Potencias-CopiarDocumento9 páginasFunciones Complejas Elementales-Series de Potencias-CopiarGustavo TecheiraAún no hay calificaciones
- Laboratorio de Física IIDocumento36 páginasLaboratorio de Física IIMiguel Flores AndradeAún no hay calificaciones
- Planificadores Matematica 1BGU U6Documento5 páginasPlanificadores Matematica 1BGU U6DON BOSCO GUAYASAún no hay calificaciones
- Simulación 1Documento10 páginasSimulación 1Fernando GONZALEZAún no hay calificaciones
- 212 - U0 - ED - FormularioDocumento7 páginas212 - U0 - ED - FormularioRodrigo GomezAún no hay calificaciones
- Módulo 1.2 - Continuidad y Derivabilidad. Derivadas y AplicacionesDocumento32 páginasMódulo 1.2 - Continuidad y Derivabilidad. Derivadas y AplicacionesAdryAún no hay calificaciones
- Plan Trabajo Calculo I Ing - Civil 2021Documento3 páginasPlan Trabajo Calculo I Ing - Civil 2021Pablo MamaniAún no hay calificaciones
- Sistemas DinamicosDocumento5 páginasSistemas DinamicosJuan Carlos ZeusAún no hay calificaciones
- Plan 4to AñoDocumento5 páginasPlan 4to AñoEubemis Cortez martínezAún no hay calificaciones
- Cuestionario de Grado-Matematica-ADocumento23 páginasCuestionario de Grado-Matematica-AJeimmy RamosAún no hay calificaciones
- Silabo Analisis Matematico IDocumento3 páginasSilabo Analisis Matematico ISamantha De CárdenasAún no hay calificaciones
- Herramienta de Alienacion Curricular Matematicas Algebra IIDocumento14 páginasHerramienta de Alienacion Curricular Matematicas Algebra IIsandraAún no hay calificaciones
- Archivo 2023124161550Documento6 páginasArchivo 2023124161550ZhikitaaRojitaszRojasAún no hay calificaciones
- Concentración de CO2 en Una FunciónDocumento3 páginasConcentración de CO2 en Una Funciónenfermero geriatricoAún no hay calificaciones
- Álgebra Pre-Universitaria Volumen 2 - Eduardo Espinoza RamosDocumento900 páginasÁlgebra Pre-Universitaria Volumen 2 - Eduardo Espinoza RamosMiguel AngelAún no hay calificaciones
- Repaso Logaritmos 04-08Documento20 páginasRepaso Logaritmos 04-08mata mata mataAún no hay calificaciones
- Actividad 2.1 (Preguntas de Repaso y Análisis) .Documento6 páginasActividad 2.1 (Preguntas de Repaso y Análisis) .gerardo vega franco100% (1)
- Portafolio de Evidencia Unidad 2Documento21 páginasPortafolio de Evidencia Unidad 2Raldo JuarezAún no hay calificaciones
- Act Col Tarea2 Grupo 100410A 614Documento33 páginasAct Col Tarea2 Grupo 100410A 614JUNIOR ALEXANDERAún no hay calificaciones
- PLANIFICACION 5º2º 2023 (Autoguardado) 05-06-2023Documento14 páginasPLANIFICACION 5º2º 2023 (Autoguardado) 05-06-2023Andrea Silvana FernandezAún no hay calificaciones
- Modelos Matematicos en EcologiaDocumento4 páginasModelos Matematicos en EcologiaC VAún no hay calificaciones
- Ecuaciones de Primer GradoDocumento15 páginasEcuaciones de Primer GradoArias Richard DAún no hay calificaciones
- Ejercicios 4 y 6Documento39 páginasEjercicios 4 y 6Luis AngelAún no hay calificaciones
- Planificación de Métodos Ii Per 2023Documento9 páginasPlanificación de Métodos Ii Per 2023Alex MirandaAún no hay calificaciones
- Matematicas Bachillerato 2022Documento18 páginasMatematicas Bachillerato 2022Ronny Chacón FernándezAún no hay calificaciones
- Transformación LaplaceDocumento21 páginasTransformación LaplaceAlex Huaman CiezaAún no hay calificaciones
- Proyecto de AsignaturaDocumento16 páginasProyecto de AsignaturaSelvin Daniel Gomez0% (1)