También podría gustarte
- Taller 3 ED de Orden SuperiorDocumento3 páginasTaller 3 ED de Orden SuperiorDaniel TapiaAún no hay calificaciones
- Unidad 21 Ejemplo 21-2Documento2 páginasUnidad 21 Ejemplo 21-2Luis MartinezAún no hay calificaciones
- Informe Laboratorio N°5Documento8 páginasInforme Laboratorio N°5Daniel CarlosAún no hay calificaciones
- PC-3A Calculo IIIDocumento3 páginasPC-3A Calculo IIIJavier Rojas TrujilloAún no hay calificaciones
- Umbo Fernandez - Semana #1 - IMEDocumento15 páginasUmbo Fernandez - Semana #1 - IMEDAVID UMBO FERNANDEZAún no hay calificaciones
- Tcal Lab07 NDocumento12 páginasTcal Lab07 NAndrea GuzmanAún no hay calificaciones
- Ejercicio SchmidDocumento1 páginaEjercicio SchmidOscar SolisAún no hay calificaciones
- CAPITULO - V (Diferenciacion) PRELIMINARDocumento20 páginasCAPITULO - V (Diferenciacion) PRELIMINARLourdesAún no hay calificaciones
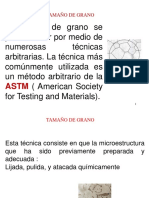
- tamaño_granos_ASTMDocumento15 páginastamaño_granos_ASTMPablo Daniel Choque AlvizAún no hay calificaciones
- Calcula El Tamaño de La Tierra para Que Fuese Un Agujero Negro. Teoría de John Michell de Agujeros Negros.Documento3 páginasCalcula El Tamaño de La Tierra para Que Fuese Un Agujero Negro. Teoría de John Michell de Agujeros Negros.IsabelAún no hay calificaciones
- CIENCIA DE MATERIALES II - Defectos de la red cristalinaDocumento2 páginasCIENCIA DE MATERIALES II - Defectos de la red cristalinaLuis Alberto Rebolledo TorresAún no hay calificaciones
- Trabajo de Sistemas Lineales NS1-NS2Documento1 páginaTrabajo de Sistemas Lineales NS1-NS2camilo pedrozaAún no hay calificaciones
- Riser Solidificacion Final TerminadoDocumento24 páginasRiser Solidificacion Final TerminadoElio CRAún no hay calificaciones
- Ensayos de Dureza y Tracción (Curso)Documento28 páginasEnsayos de Dureza y Tracción (Curso)abdelilah makhloufAún no hay calificaciones
- Unidad 2.2. Ejercicios Redes y Estructuras Cristalinas. 202110Documento31 páginasUnidad 2.2. Ejercicios Redes y Estructuras Cristalinas. 202110Isidora Martin TriviñoAún no hay calificaciones
- Tarea 3. - Solidos IDocumento7 páginasTarea 3. - Solidos IAdlai SantosAún no hay calificaciones
- Compendio Fisica 2Documento86 páginasCompendio Fisica 2Jhan Rico HuamanAún no hay calificaciones
- Informe 1 de Metalurgia Fisica PDFDocumento10 páginasInforme 1 de Metalurgia Fisica PDFjheysonAún no hay calificaciones
- Informe Ciencias de Los Materiales N°1Documento18 páginasInforme Ciencias de Los Materiales N°1Alonso ArancibiaAún no hay calificaciones
- Practica #4 Medidas de VariabilidadDocumento7 páginasPractica #4 Medidas de VariabilidadRONY IVAN ALLHUIRCA LOPEZAún no hay calificaciones
- Campos DireccionalesDocumento7 páginasCampos DireccionalesAlejandra Meza RomeroAún no hay calificaciones
- Limite-Parte5Documento10 páginasLimite-Parte5Jhohan Alexis Rodriguez Herazo100% (1)
- Sistema de Maquinas Desarmables 62-005Documento144 páginasSistema de Maquinas Desarmables 62-005Fabian Nina AguirreAún no hay calificaciones
- Parcial Taller Mecanica de Los MaterialesDocumento2 páginasParcial Taller Mecanica de Los MaterialesDaniel Roncancio MoralesAún no hay calificaciones
- Informe Péndulo Físico y Teorema de SteinerDocumento15 páginasInforme Péndulo Físico y Teorema de SteinerStewardAún no hay calificaciones
- Grupo N°3Documento5 páginasGrupo N°3Javier HTAún no hay calificaciones
- E6.5 Esfuerzo Cortante Máximo Ejercicio 1Documento4 páginasE6.5 Esfuerzo Cortante Máximo Ejercicio 1EDGAR VEGA ORTIZAún no hay calificaciones
- Examen EnsayosDocumento9 páginasExamen EnsayosSesly MedinaAún no hay calificaciones
- XDDocumento7 páginasXDJherson Denys Contreras RamosAún no hay calificaciones
- Práctica Calificada N°12Documento14 páginasPráctica Calificada N°12Franco SFAún no hay calificaciones
- T2 Jose FernandezDocumento9 páginasT2 Jose FernandezJose Antonio FernandezAún no hay calificaciones
- Problema 8 Pag 454Documento3 páginasProblema 8 Pag 454Jose luis Sarayse cruzAún no hay calificaciones
- Ejercicios Del Tema 3 Circuitos de Corriente AlternaDocumento7 páginasEjercicios Del Tema 3 Circuitos de Corriente AlternaDeisy BaezAún no hay calificaciones
- PROBLEMASDocumento8 páginasPROBLEMASCarlo MurguiaAún no hay calificaciones
- GRUPO C Preguntas y Ejercicios Sugeridos Del Capítulo 21Documento8 páginasGRUPO C Preguntas y Ejercicios Sugeridos Del Capítulo 21Pamela VarelaAún no hay calificaciones
- Ley de Schmid: Desarrollo de problemas sobre deslizamiento en materialesDocumento9 páginasLey de Schmid: Desarrollo de problemas sobre deslizamiento en materialesRicardo GonzalezAún no hay calificaciones
- Cuestionario Previo Practica 3 Materiales PDFDocumento2 páginasCuestionario Previo Practica 3 Materiales PDFLivier SalazarAún no hay calificaciones
- Problemas Resueltos - II UnidadDocumento8 páginasProblemas Resueltos - II Unidadronald milton anticona reyesAún no hay calificaciones
- Aputes de SolidifaciónDocumento37 páginasAputes de SolidifaciónCaballero RrzAún no hay calificaciones
- PROBLEMA Kirchhoff Nivell AltDocumento3 páginasPROBLEMA Kirchhoff Nivell AltChema VillalbaAún no hay calificaciones
- Permeabilidad magnética laboratorioDocumento2 páginasPermeabilidad magnética laboratorioAlexander JacomeAún no hay calificaciones
- Coeficiente de Dilatación LinealDocumento10 páginasCoeficiente de Dilatación LinealDavid HernandezAún no hay calificaciones
- Tarea 4 Física III PDFDocumento1 páginaTarea 4 Física III PDFGlendaAún no hay calificaciones
- LE-010 Campo Magnetico TerrestreDocumento9 páginasLE-010 Campo Magnetico TerrestreGLORIA ESTEFANY CHIJE ANAYAAún no hay calificaciones
- Zsolución 2da Práctica - Industrial - ED - 2022 A PDFDocumento1 páginaZsolución 2da Práctica - Industrial - ED - 2022 A PDFLESLY ABIGAIL CALLATA QUECARAAún no hay calificaciones
- Primera Práctica Calificada Ecuaciones DiferencialesDocumento20 páginasPrimera Práctica Calificada Ecuaciones DiferencialesRenatto LoyolaAún no hay calificaciones
- Solucion y Examen - Mecanica - 2130Documento5 páginasSolucion y Examen - Mecanica - 2130David BuitragoAún no hay calificaciones
- TemplabilidadDocumento24 páginasTemplabilidadJaime Alfonso Gonzáles VivasAún no hay calificaciones
- Recristalización de probetas metálicasDocumento28 páginasRecristalización de probetas metálicasJackeline Jazmin Verastegui AlegriaAún no hay calificaciones
- Variación de La Resistencia Con La Temperatura: I. ObjetivosDocumento11 páginasVariación de La Resistencia Con La Temperatura: I. ObjetivosVerónica BuesoAún no hay calificaciones
- Laboratorio 1 y 2 FenomenosDocumento15 páginasLaboratorio 1 y 2 FenomenosDaniel CarlosAún no hay calificaciones
- 05 Practica - Diametros CriticosDocumento1 página05 Practica - Diametros CriticosJaime Alfonso Gonzalez VivasAún no hay calificaciones
- Informe de Laboratorio 1 y 2 - Fenomenos de TransporteDocumento10 páginasInforme de Laboratorio 1 y 2 - Fenomenos de TransporteJuan Beto MamaniAún no hay calificaciones
- NTC3210Documento20 páginasNTC3210coordinador Proyecto100% (1)
- Unidad 2 Corregida Versión-HDocumento84 páginasUnidad 2 Corregida Versión-HMisael VicencioAún no hay calificaciones
- Taller Propiedades Calculo TensionDocumento4 páginasTaller Propiedades Calculo TensionAntonhy GutiérrezAún no hay calificaciones
- Tarea 3 Diseño de Equipo LEA WordDocumento7 páginasTarea 3 Diseño de Equipo LEA WordAndré EstrellaAún no hay calificaciones
- Sistema Masa Resorte No AmortiguadoDocumento11 páginasSistema Masa Resorte No AmortiguadoAlex FaicánAún no hay calificaciones
- Sistemas Resorte Masa Movimiento Libre No AmortiguadoDocumento15 páginasSistemas Resorte Masa Movimiento Libre No AmortiguadojoseAún no hay calificaciones
- Aplicaciones de Edo Orden SuperiorDocumento6 páginasAplicaciones de Edo Orden SuperiorRogger Gonzalo Mengoa ChavezAún no hay calificaciones
- Contrato IncompletoDocumento4 páginasContrato IncompletoGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- 1era Práctica DirigidaDocumento3 páginas1era Práctica DirigidaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Informe de SostenibilidadDocumento4 páginasInforme de SostenibilidadGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Ejercicios de Logística MineraDocumento12 páginasEjercicios de Logística MineraGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- 1er Examen Con Datos Agrupados ADocumento1 página1er Examen Con Datos Agrupados AGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Problemas Propuestos-Soto Acrota Giancarlo ArmandoDocumento6 páginasProblemas Propuestos-Soto Acrota Giancarlo ArmandoGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- TIF - Ecologia y Conservación AmbientalDocumento4 páginasTIF - Ecologia y Conservación AmbientalGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Marco Dos PPTSDocumento38 páginasMarco Dos PPTSGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Laboratorio de Química General - Practica Nro 9 - Acidos y BasesDocumento15 páginasLaboratorio de Química General - Practica Nro 9 - Acidos y BasesGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- 5 AñosDocumento4 páginas5 AñosGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- MTIUDocumento1 páginaMTIUGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Modelo Digital Del Terreno MDT o DTMDocumento6 páginasModelo Digital Del Terreno MDT o DTMGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Lista de Problemas Propuestos - Cap. 8 Conservacio de La Energia de Un SistemaDocumento1 páginaLista de Problemas Propuestos - Cap. 8 Conservacio de La Energia de Un SistemaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Introducción a la Minería: Banco de preguntasDocumento3 páginasIntroducción a la Minería: Banco de preguntasGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Ingenieria ElectricaDocumento5 páginasIngenieria ElectricaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Introduccion de Tif de ComunicacionDocumento1 páginaIntroduccion de Tif de ComunicacionGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Laboratorio de Química General - Practica Nro 9 - Acidos y BasesDocumento15 páginasLaboratorio de Química General - Practica Nro 9 - Acidos y BasesGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Cuestionario 4Documento2 páginasCuestionario 4GIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Foro de Reflexion para EnviarDocumento3 páginasForo de Reflexion para EnviarGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Tarea de TermodinamicaDocumento3 páginasTarea de TermodinamicaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Modelado 3D Mina San ClementeDocumento10 páginasModelado 3D Mina San ClementeGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Informe 3-Giancarlo Armando Soto AcrotaDocumento11 páginasInforme 3-Giancarlo Armando Soto AcrotaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Mito de WiracochaDocumento2 páginasMito de WiracochaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Mito de WiracochaDocumento2 páginasMito de WiracochaGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Discurso de Francisco Mostajo Miranda sobre Mariano Ambroncio CaterianoDocumento2 páginasDiscurso de Francisco Mostajo Miranda sobre Mariano Ambroncio CaterianoGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Eolico-Glaciar - DeslizamientosDocumento77 páginasEolico-Glaciar - DeslizamientosGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- Teoria de Errores e Incertidumbre VirtualDocumento10 páginasTeoria de Errores e Incertidumbre VirtualGIANCARLO ARMANDO SOTO ACROTAAún no hay calificaciones
- 11 - Asignación 3 - Quiz - Capítulo - III - Análisis - de - Carga - y - EsfuerzoDocumento5 páginas11 - Asignación 3 - Quiz - Capítulo - III - Análisis - de - Carga - y - EsfuerzoRolexAún no hay calificaciones
- Clase 9 y 10 CelulaDocumento20 páginasClase 9 y 10 CelulaMichael Salas CoronadoAún no hay calificaciones
- UntitledDocumento27 páginasUntitledYuri ContrerasAún no hay calificaciones
- Ley sobre asbesto en Argentina y riesgos para la saludDocumento2 páginasLey sobre asbesto en Argentina y riesgos para la saludapaolantAún no hay calificaciones
- Lo Animal en Muro Noroeste y Los Caynas de César VallejoDocumento31 páginasLo Animal en Muro Noroeste y Los Caynas de César VallejoLALO MANUEL HUAMAN LAURENCIOAún no hay calificaciones
- Protocolo Nacional de MonitoreoDocumento36 páginasProtocolo Nacional de MonitoreoAlexander ValdiviaAún no hay calificaciones
- Informe de Supervision Sso FinalDocumento25 páginasInforme de Supervision Sso FinalKaterin BarrientosAún no hay calificaciones
- Temario ToxicologiaDocumento2 páginasTemario ToxicologiaGenesis RiveroAún no hay calificaciones
- Bioremedación PDFDocumento15 páginasBioremedación PDFAnonymous 2pmYItwsAún no hay calificaciones
- Marca Personal Semana 2Documento7 páginasMarca Personal Semana 2florenciaa victoriaAún no hay calificaciones
- Instructivo de Tareas MA3 PDocumento3 páginasInstructivo de Tareas MA3 PELIAN JOSUE FUENTES LOPEZAún no hay calificaciones
- Examen Procesos I Fase Iii NDocumento8 páginasExamen Procesos I Fase Iii Nsara_rubiovAún no hay calificaciones
- A Review of The Properties of Hemp Concrete For Green Building EsDocumento17 páginasA Review of The Properties of Hemp Concrete For Green Building EsArlen GutierrezAún no hay calificaciones
- t4 TraDocumento2 páginast4 TraFernanda Villarraga GuzmánAún no hay calificaciones
- ALEMANIA - CODIGO SOCIAL - 27a SGB V - Inseminación ArtificialDocumento3 páginasALEMANIA - CODIGO SOCIAL - 27a SGB V - Inseminación ArtificialJENNIFER THAMARA BUITRON VILLANUEVAAún no hay calificaciones
- Pedt - MonguiDocumento175 páginasPedt - MonguiMilton SaenzAún no hay calificaciones
- S09 s1-MaterialTEC PSIC, CASOSDocumento15 páginasS09 s1-MaterialTEC PSIC, CASOSAnggielina BracoAún no hay calificaciones
- 17-Octubre-2020. Conversatorio de Rakumarka, Educación Por VROA, 1Documento4 páginas17-Octubre-2020. Conversatorio de Rakumarka, Educación Por VROA, 1Waldir Martin osorioAún no hay calificaciones
- Dossier TEA PDFDocumento190 páginasDossier TEA PDFNayarettAún no hay calificaciones
- Organizadores VisualesDocumento8 páginasOrganizadores VisualesJAVIER KENNEDY PAITAN MENDOZAAún no hay calificaciones
- Protocolo Final Análisis Del Conocimiento de Los Riesgos Del Vapeo en Adultos Jóvenes de 20 A 24 AñosDocumento13 páginasProtocolo Final Análisis Del Conocimiento de Los Riesgos Del Vapeo en Adultos Jóvenes de 20 A 24 Años21030642Aún no hay calificaciones
- Biomas de Panamá-InvestigaciónDocumento12 páginasBiomas de Panamá-InvestigaciónframbuesitaAún no hay calificaciones
- Taller de La Franja AmarillaDocumento2 páginasTaller de La Franja AmarillaLeidy RuizAún no hay calificaciones
- Mente Del AgresorDocumento2 páginasMente Del AgresorJoao Alessandro Evaristo MontoyaAún no hay calificaciones
- Examen Diario 2do - EcorregionesDocumento1 páginaExamen Diario 2do - EcorregionesJohnny Crazyto100% (4)
- Analisis de Cableado EstructuradoDocumento47 páginasAnalisis de Cableado Estructuradomamani gonzalez bryan armandoAún no hay calificaciones
- Plan evaluación 1er añoDocumento2 páginasPlan evaluación 1er añosergioAún no hay calificaciones
- Liptak - Curso de Astrologia PDFDocumento239 páginasLiptak - Curso de Astrologia PDFlisaloup100% (16)
- Teoría de colas: Modelos matemáticos para sistemas de líneas de esperaDocumento293 páginasTeoría de colas: Modelos matemáticos para sistemas de líneas de esperaSALMA MAGALÍ DE LA ROSA POSADASAún no hay calificaciones
- Diagrama GraficaDocumento1 páginaDiagrama GraficaLuciana Nashira Aranda OcsasAún no hay calificaciones