También podría gustarte
- Setima ClaseDocumento55 páginasSetima ClaseMilton Inga100% (1)
- Modulo - 03 - Deflexiones en VigasDocumento5 páginasModulo - 03 - Deflexiones en VigasapolonioAún no hay calificaciones
- Flexión PuraDocumento9 páginasFlexión PuraAnthony ARAún no hay calificaciones
- Análisis estructural: Deflexión en vigasDocumento5 páginasAnálisis estructural: Deflexión en vigasCarlos LuAún no hay calificaciones
- ESFUERZOS COMBINADOS EN INGENIERÍA MECÁNICADocumento33 páginasESFUERZOS COMBINADOS EN INGENIERÍA MECÁNICASeaGaboAún no hay calificaciones
- Guía 04. Fuerzas Cortantes y Momentos FlexionantesDocumento6 páginasGuía 04. Fuerzas Cortantes y Momentos FlexionantesDouglas José García Díaz0% (1)
- Unidad 4 Esfuerzos CortanteDocumento12 páginasUnidad 4 Esfuerzos CortanteEngels Uriarte0% (1)
- Esfuerzo CortanteDocumento17 páginasEsfuerzo CortanteArnold Baca SanchezAún no hay calificaciones
- Conceptos y definiciones en ingeniería biomédicaDocumento10 páginasConceptos y definiciones en ingeniería biomédicaMyrna Lucía Tamayo ChávezAún no hay calificaciones
- Esfuerzos en Vigas IDocumento21 páginasEsfuerzos en Vigas IFrancisco J. Garcia GillyAún no hay calificaciones
- Esfuerzos en vigasDocumento11 páginasEsfuerzos en vigasJosUé P. ZavalaAún no hay calificaciones
- Esfuerzos Debido A FlexiónDocumento4 páginasEsfuerzos Debido A FlexiónEdwin GuzmánAún no hay calificaciones
- Diagrama de Fuerza Cortante y Momento FlexionanteDocumento8 páginasDiagrama de Fuerza Cortante y Momento FlexionanteJean Paul VereauAún no hay calificaciones
- Verdadero o FalsoDocumento6 páginasVerdadero o FalsoCecilia VenturaAún no hay calificaciones
- Deformación en Vigas - BUENASDocumento5 páginasDeformación en Vigas - BUENASGabriel PeñalozaAún no hay calificaciones
- Fórmula esfuerzo cortante vigas rectangularDocumento4 páginasFórmula esfuerzo cortante vigas rectangularEdwincito FloresAún no hay calificaciones
- Tema 2 - Estado Tensional y DeformacionalDocumento46 páginasTema 2 - Estado Tensional y DeformacionalJose Andres SolorzanoAún no hay calificaciones
- Investigacion T3Documento21 páginasInvestigacion T3Lalo Aguiran LópezAún no hay calificaciones
- Tema 11.2 2021-2 FDocumento20 páginasTema 11.2 2021-2 FAmy MontalvoAún no hay calificaciones
- Combinación de Esfuerzos: Axial, Torsión y FlexiónDocumento7 páginasCombinación de Esfuerzos: Axial, Torsión y FlexiónHENRY HUACCAYCACHACC CAJAMARCAAún no hay calificaciones
- ESTATICADocumento19 páginasESTATICAjulio sorianoAún no hay calificaciones
- HUOLDocumento13 páginasHUOLZabdy ZavalaAún no hay calificaciones
- Deduccion de La Formula de TorsionDocumento9 páginasDeduccion de La Formula de Torsionjose100% (2)
- Sesion 7 Flexion PDFDocumento21 páginasSesion 7 Flexion PDFtitoAún no hay calificaciones
- Resumen Cap 3 ShigleyDocumento8 páginasResumen Cap 3 ShigleyDavid R. ParejaAún no hay calificaciones
- FlexionDocumento5 páginasFlexionCesar GutierrezAún no hay calificaciones
- Diagrama de Cortante y Momento Metodo de Areas PDFDocumento13 páginasDiagrama de Cortante y Momento Metodo de Areas PDFZabdy ZavalaAún no hay calificaciones
- RM2 - Esfuerzo Axial. Tracción y CompresiónDocumento26 páginasRM2 - Esfuerzo Axial. Tracción y Compresiónleandro CattaneoAún no hay calificaciones
- 10 SemanaDocumento19 páginas10 SemanaJhoel PatricioAún no hay calificaciones
- MM2. T-02. Elementos Curvos. 02 - 05 - 2023Documento40 páginasMM2. T-02. Elementos Curvos. 02 - 05 - 2023julio.15.10.02Aún no hay calificaciones
- Sesión 6 - Resistencia de MaterialesDocumento32 páginasSesión 6 - Resistencia de MaterialesLuis angel Alanya bozaAún no hay calificaciones
- Tema 12Documento22 páginasTema 12maritavi100% (1)
- Vigas: Ecuaciones de cortante y momentoDocumento7 páginasVigas: Ecuaciones de cortante y momentoHarrison JordanAún no hay calificaciones
- Flexión pura y deformaciones en elementos sometidos a flexiónDocumento17 páginasFlexión pura y deformaciones en elementos sometidos a flexiónNick AmayaAún no hay calificaciones
- Esfuerzos internos por flexión vigaDocumento8 páginasEsfuerzos internos por flexión vigaLuis OrtegaAún no hay calificaciones
- Esfuerzo en VigasDocumento7 páginasEsfuerzo en VigasCarlos Alberto Pari UmiñaAún no hay calificaciones
- Esfuerzo cortante en vigas: Ley de CollignonDocumento11 páginasEsfuerzo cortante en vigas: Ley de CollignonRosa Benavente100% (1)
- Esfuerzo CortanteDocumento2 páginasEsfuerzo CortanteLucia MartinezAún no hay calificaciones
- Unidad Ii-Tema IiDocumento13 páginasUnidad Ii-Tema IiJesús A RodriguezAún no hay calificaciones
- 1.1. Analisis de EsfuerzoDocumento29 páginas1.1. Analisis de EsfuerzoBrandon HuggAún no hay calificaciones
- Esfuerzos Normales para Vigas en FlexiónDocumento9 páginasEsfuerzos Normales para Vigas en FlexiónCarlos PerezAún no hay calificaciones
- Tema 2Documento40 páginasTema 2lalaAún no hay calificaciones
- Flexion y Torsion en Ejes y Vigas 2Documento1 páginaFlexion y Torsion en Ejes y Vigas 2Anthony ZambranoAún no hay calificaciones
- Deduccion de Ecuacion de FlexionDocumento5 páginasDeduccion de Ecuacion de FlexionLupee CruzAún no hay calificaciones
- Sesion 10Documento12 páginasSesion 10Cristian Moreno RoldanAún no hay calificaciones
- 11 Semana - VIGAS DiagramasDocumento11 páginas11 Semana - VIGAS DiagramasGesslerLyndonMedranoSanchezAún no hay calificaciones
- 04-Tension en Un PuntoDocumento23 páginas04-Tension en Un Puntoenrique364Aún no hay calificaciones
- Momentos de torsión y deformaciones en barras circularesDocumento6 páginasMomentos de torsión y deformaciones en barras circulareskevin AlvarezAún no hay calificaciones
- Tema 9 - CAP.7 TORSIONDocumento45 páginasTema 9 - CAP.7 TORSIONMICHEL FRANK TEJADA PERFECTO100% (3)
- Seccion 13Documento31 páginasSeccion 13marelin paucar gomezAún no hay calificaciones
- S08.s1 - Clase - Semana 8Documento21 páginasS08.s1 - Clase - Semana 8Luis PantaAún no hay calificaciones
- Determinación de Elementos MecánicosDocumento8 páginasDeterminación de Elementos Mecánicosjacob castilloAún no hay calificaciones
- Mecanica Avanzada 8Documento10 páginasMecanica Avanzada 8Deiner Alexander SarmientoAún no hay calificaciones
- Flexion Simple RdemDocumento28 páginasFlexion Simple RdemDaniel SersingAún no hay calificaciones
- Esfuerzos Cortantes en VigasDocumento12 páginasEsfuerzos Cortantes en VigasNacho Pv-Aa ParedesAún no hay calificaciones
- FlexiónDocumento58 páginasFlexiónDaniel Andrade100% (1)
- Flexion AsimetricaDocumento8 páginasFlexion AsimetricaAlvaro MaldonadoAún no hay calificaciones
- Flexion y Torsion en Ejes y Vigas 3Documento1 páginaFlexion y Torsion en Ejes y Vigas 3Anthony ZambranoAún no hay calificaciones
- Deber 2Documento2 páginasDeber 2JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Evaluación FinalDocumento4 páginasEvaluación FinalJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Deber 2 Guanotasig JonathanDocumento2 páginasDeber 2 Guanotasig JonathanJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Informe de Taller 3Documento10 páginasInforme de Taller 3JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Deber - Consulta de SensoresDocumento5 páginasDeber - Consulta de SensoresJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Deber 1 - Guanotasig JonathanDocumento2 páginasDeber 1 - Guanotasig JonathanJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Evaluación FinalDocumento4 páginasEvaluación FinalJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Preguntas de Sensores Guanotasig JonathanDocumento19 páginasPreguntas de Sensores Guanotasig JonathanJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guanotasig Jonathan - Deber 2Documento1 páginaGuanotasig Jonathan - Deber 2JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
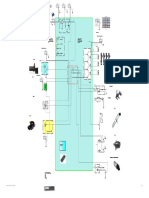
- Livewire - Professional Edition - GUANOTASIG JONATHAN - ECU - ACT - SENSORESDocumento1 páginaLivewire - Professional Edition - GUANOTASIG JONATHAN - ECU - ACT - SENSORESJONATHAN ALEXIS GUANOTASIG CHICAIZA100% (1)
- Caratula IndividualDocumento1 páginaCaratula IndividualJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guanotasig Jonathan - Deber 1Documento1 páginaGuanotasig Jonathan - Deber 1JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Deber 1 - Guanotasig JonathanDocumento2 páginasDeber 1 - Guanotasig JonathanJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- 6122 CalificacionesDocumento1 página6122 CalificacionesJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Actividad Individual 3Documento4 páginasActividad Individual 3JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Ensayo FinalDocumento3 páginasEnsayo FinalJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Componentes Eléctricos y Eléctronicos para SensoresDocumento1 páginaComponentes Eléctricos y Eléctronicos para SensoresJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Actividad Individual 2Documento2 páginasActividad Individual 2JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guia IndividualDocumento14 páginasGuia IndividualJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Actividad Individual 4Documento2 páginasActividad Individual 4JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Actividad Individual 1Documento6 páginasActividad Individual 1JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Comprobaciones Tolerancias y Materiales para CulatasDocumento8 páginasComprobaciones Tolerancias y Materiales para CulatasJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CulatasDocumento8 páginasGuanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CulatasJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Cara1 1Documento1 páginaCara1 1JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Cara1 1Documento1 páginaCara1 1JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CilindrosDocumento4 páginasGuanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CilindrosJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Guanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CilindrosDocumento4 páginasGuanotasig Jonathan - Comprobaciones Tolerancias y Materiales para CilindrosJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Cara1 1Documento1 páginaCara1 1JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- S2 - P1 - Guanotasig - Chicaiza - Jonathan - Alexis - Ejercicios en Clase - Movimiento - AbsolutoDocumento2 páginasS2 - P1 - Guanotasig - Chicaiza - Jonathan - Alexis - Ejercicios en Clase - Movimiento - AbsolutoJONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- S10 - P2 Trabajo Colaborativo - Guanotasig - Jonathan - Traslación - Curvilínea - y - Rotación Alrededor - Eje - Fijo - (Cinética C.R.)Documento4 páginasS10 - P2 Trabajo Colaborativo - Guanotasig - Jonathan - Traslación - Curvilínea - y - Rotación Alrededor - Eje - Fijo - (Cinética C.R.)JONATHAN ALEXIS GUANOTASIG CHICAIZAAún no hay calificaciones
- Torques Skoda 1.6Documento2 páginasTorques Skoda 1.6801400100% (1)
- Trabajo de Contrucciones II Sobre Losa y PlanosDocumento9 páginasTrabajo de Contrucciones II Sobre Losa y PlanosAnthony Mora BonillaAún no hay calificaciones
- TM2752Documento1036 páginasTM2752William Giovanni Madariaga Malebrán100% (9)
- Funciones o Propósitos de Los Refuerzos Estructura de Concreto ArmadoDocumento6 páginasFunciones o Propósitos de Los Refuerzos Estructura de Concreto Armadol FernandoAún no hay calificaciones
- Leyes de Kirchhoff laboratorio ingeniería mecánicaDocumento16 páginasLeyes de Kirchhoff laboratorio ingeniería mecánicagitanodefeAún no hay calificaciones
- MEDIO CULTIVO YASEPSDocumento25 páginasMEDIO CULTIVO YASEPSsideralAún no hay calificaciones
- INGENIERIA de SOFTWARE - 3554 - Investigacion de La Diferencia Entre Seguridad y Fiabilidad Del SoftwareDocumento6 páginasINGENIERIA de SOFTWARE - 3554 - Investigacion de La Diferencia Entre Seguridad y Fiabilidad Del SoftwareSanchez Miguel100% (1)
- Iopertivab1 141013212808 Conversion Gate01Documento247 páginasIopertivab1 141013212808 Conversion Gate01Midwar HenryAún no hay calificaciones
- Protocolo de Prueba Hidraulica-Desague Val 6Documento10 páginasProtocolo de Prueba Hidraulica-Desague Val 6Joules CeferinhoAún no hay calificaciones
- Pozos de Lixiviacion UltimoDocumento8 páginasPozos de Lixiviacion UltimoErikCortezBerrospiAún no hay calificaciones
- Proc Medic Potenciales On OffDocumento13 páginasProc Medic Potenciales On OffEdgardo José Tamaronis LeonettAún no hay calificaciones
- Manual Simpify3dDocumento8 páginasManual Simpify3dpapalui74Aún no hay calificaciones
- Programación orientada a objetos con JavaScriptDocumento8 páginasProgramación orientada a objetos con JavaScriptBekyGLoAún no hay calificaciones
- Grado de IndeterminaciónDocumento5 páginasGrado de IndeterminaciónDaniela Maldonado NavarroAún no hay calificaciones
- Visita obra construcción facultad ingeniería UNSCHDocumento16 páginasVisita obra construcción facultad ingeniería UNSCHAnonymous x7WgB3aZPAún no hay calificaciones
- Cronograma Gantt CPMDocumento6 páginasCronograma Gantt CPMPercy IldefonsoAún no hay calificaciones
- 30 KV Nuevo Pyto 31-01-2020 - EspañaDocumento146 páginas30 KV Nuevo Pyto 31-01-2020 - EspañaalfredoAún no hay calificaciones
- Ejercicios Circuitos DC2Documento9 páginasEjercicios Circuitos DC2tavo VarAún no hay calificaciones
- Tema 04 - Especificaciones Tecnicas MetradoDocumento13 páginasTema 04 - Especificaciones Tecnicas MetradoJhonathan Soto CáceresAún no hay calificaciones
- ACQUASTOPDocumento52 páginasACQUASTOPandri yudiantoAún no hay calificaciones
- Ejercicio Paneles 2Documento4 páginasEjercicio Paneles 2Manuel Sebastian Diaz GiraldezAún no hay calificaciones
- Taller º5 Ondas y CalorDocumento8 páginasTaller º5 Ondas y CalorLuiggi Gusseppi BarretoAún no hay calificaciones
- SEMANA #04-pDocumento62 páginasSEMANA #04-pCesar Robles100% (1)
- FT Adhesivo Piso Sobre Piso WeberDocumento3 páginasFT Adhesivo Piso Sobre Piso WeberKlaUdio FUentesAún no hay calificaciones
- Normas VdiDocumento5 páginasNormas VdiBrandon Ariel100% (2)
- Arctículo 2Documento13 páginasArctículo 2ERICK RENZO DIAZ ANTICONAAún no hay calificaciones
- El Puente General Rafael UrdanetaDocumento4 páginasEl Puente General Rafael UrdanetaLilia AraujoAún no hay calificaciones
- NTC 1646 Madera. Madera Aserrada para Construcción. Dimensiones, Clasificación y DefectosDocumento14 páginasNTC 1646 Madera. Madera Aserrada para Construcción. Dimensiones, Clasificación y DefectosalexagoAún no hay calificaciones
- 08 Equipo Laboratorio PDFDocumento23 páginas08 Equipo Laboratorio PDFPedro BancayanAún no hay calificaciones
- Práctica No.8: Celda HullDocumento4 páginasPráctica No.8: Celda HullSaruless RSAún no hay calificaciones