También podría gustarte
- La Agraria - S03.s1 - Principios de Velocidad y Aceleración en Mecanismos Extra 01Documento9 páginasLa Agraria - S03.s1 - Principios de Velocidad y Aceleración en Mecanismos Extra 01Nadine Clayre Collado PachecoAún no hay calificaciones
- Principios de Velocidad y Aceleración en MecanismosDocumento17 páginasPrincipios de Velocidad y Aceleración en MecanismosJonathanCatari100% (1)
- U3 - S3 - Ejercicios para Actividad Virtual (Resistencia)Documento3 páginasU3 - S3 - Ejercicios para Actividad Virtual (Resistencia)Raul LbAún no hay calificaciones
- So Lucio NarioDocumento5 páginasSo Lucio NarioElias QcheAún no hay calificaciones
- 100000M03T-GUIA N1-LABELARE01-ENSAYO DE COMPRESIÓN - SamaniegoDocumento8 páginas100000M03T-GUIA N1-LABELARE01-ENSAYO DE COMPRESIÓN - SamaniegoJose SamaniegoAún no hay calificaciones
- Facultad de Ingenieria Actividad Semana 3Documento3 páginasFacultad de Ingenieria Actividad Semana 3Juber CalderonAún no hay calificaciones
- Sesión 06 - Ejercicios Sobre Movimiento General de Mecanismos - Rev2Documento7 páginasSesión 06 - Ejercicios Sobre Movimiento General de Mecanismos - Rev2Antonio CamiloagaAún no hay calificaciones
- Laboratorio 2 - Ensayo de Compresion ELASTICIDAD Y RESISTENCIA DE MATERIALESDocumento10 páginasLaboratorio 2 - Ensayo de Compresion ELASTICIDAD Y RESISTENCIA DE MATERIALESDiego Gabriel TPAún no hay calificaciones
- Lab 3 Casi TerminadoDocumento14 páginasLab 3 Casi TerminadoJonathan Lucano RojasAún no hay calificaciones
- Resistencia de MaterialesDocumento46 páginasResistencia de MaterialesMitzylina Torres OvandoAún no hay calificaciones
- 8Documento8 páginas8Eduardo Salcedo FloresAún no hay calificaciones
- Pérdidas de carga en tuberías y accesoriosDocumento20 páginasPérdidas de carga en tuberías y accesoriosAndrea AquinoAún no hay calificaciones
- Lab 3 Deflexion ResistenciaDocumento7 páginasLab 3 Deflexion ResistenciaLouis Portilla SalinasAún no hay calificaciones
- Fundamentos de Dinámica - Práctica Calificada N°2Documento3 páginasFundamentos de Dinámica - Práctica Calificada N°2jhosselin vargasAún no hay calificaciones
- TrabajoDocumento2 páginasTrabajoE.Richard Quispe Mamani0% (1)
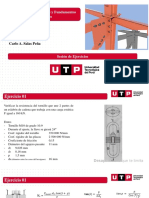
- 2.prac - Calif.2 EstaticaDocumento2 páginas2.prac - Calif.2 EstaticaCarlo PalsaAún no hay calificaciones
- Primer Parcial de Resistencia de Materiales IiDocumento1 páginaPrimer Parcial de Resistencia de Materiales IiTOMAS RODRIGUEZAún no hay calificaciones
- Resistencia de Materiales-Guía de Laboratorio 3Documento9 páginasResistencia de Materiales-Guía de Laboratorio 3Nana ForeroAún no hay calificaciones
- Texto Compilado - rESISTENCIA DE MATERIALES IIDocumento98 páginasTexto Compilado - rESISTENCIA DE MATERIALES IIAntony BG0% (1)
- PC3 Resistencia MaterialesDocumento6 páginasPC3 Resistencia MaterialesHb Choque100% (1)
- PC 1 Elementos de Maquinas y Fundamentos de DisenoDocumento10 páginasPC 1 Elementos de Maquinas y Fundamentos de DisenoAlex ChuquijaAún no hay calificaciones
- Guia N°2-100000i78n-Labflutr01-VenturímetroDocumento11 páginasGuia N°2-100000i78n-Labflutr01-VenturímetroFranco Michael Serra RomeroAún no hay calificaciones
- LabConcretoHerramientasDocumento9 páginasLabConcretoHerramientasCristhian GameroAún no hay calificaciones
- Guia N°2 - Venturímetro - Resuelto Grupalmente - Grupo 3Documento20 páginasGuia N°2 - Venturímetro - Resuelto Grupalmente - Grupo 3Cecilia Aldana GuadalupeAún no hay calificaciones
- Ejercicios de dinámica de partículas y cuerpos rígidosDocumento3 páginasEjercicios de dinámica de partículas y cuerpos rígidosalfredoAún no hay calificaciones
- Final TardeDocumento2 páginasFinal TardeJose Joel AsAún no hay calificaciones
- Material de Aula1Documento2 páginasMaterial de Aula1Luis Antonio Ramirez RamirezAún no hay calificaciones
- U6 S6 Ficha de Trabajo Sesion VirtualDocumento2 páginasU6 S6 Ficha de Trabajo Sesion VirtualIlser Chuquizuta VenturaAún no hay calificaciones
- Modulo Mecanica de FluidosDocumento189 páginasModulo Mecanica de FluidosMiguel CapuñayAún no hay calificaciones
- Tarea Calificada 1Documento1 páginaTarea Calificada 1Chinta Mendoza100% (1)
- Taller #2 Movimiento CurvilineoDocumento14 páginasTaller #2 Movimiento CurvilineoCristian Danilo AvendañoAún no hay calificaciones
- Elasticidad y resistencia de materialesDocumento7 páginasElasticidad y resistencia de materialesOJ Flores ValladaresAún no hay calificaciones
- Youkoso Vol 8 PDFDocumento264 páginasYoukoso Vol 8 PDFDiego MendozaAún no hay calificaciones
- Guía de Problemas Semana 10Documento3 páginasGuía de Problemas Semana 10Vane RecinosAún no hay calificaciones
- Resistencia de materiales PC1Documento8 páginasResistencia de materiales PC1Diego Threepwood CassinaAún no hay calificaciones
- Practica Asignada N°14 ADocumento3 páginasPractica Asignada N°14 AJunior Quispe HuarcayaAún no hay calificaciones
- 1ra Practica Calificada - Fundamentos de Dinamica (22780)Documento11 páginas1ra Practica Calificada - Fundamentos de Dinamica (22780)Lucimar GabrielaAún no hay calificaciones
- Ejercicios de Mecánica de Fluidos: Fuerza en Presa, Altura Barómetro, Presión LíquidosDocumento2 páginasEjercicios de Mecánica de Fluidos: Fuerza en Presa, Altura Barómetro, Presión LíquidosMSc Yoisdel CastilloAún no hay calificaciones
- Tarea 4 Sólidos 2017-2018Documento3 páginasTarea 4 Sólidos 2017-2018Patricio Lafebre Alvarez0% (1)
- Problemas de máquinas térmicas y ciclos de Carnot con menos deDocumento3 páginasProblemas de máquinas térmicas y ciclos de Carnot con menos degilmerAún no hay calificaciones
- Taller de Caf 4Documento8 páginasTaller de Caf 4joayaninaAún no hay calificaciones
- Laboratorio 02 (ENSAYO DE TRACCIÓN) f1Documento20 páginasLaboratorio 02 (ENSAYO DE TRACCIÓN) f1Rodolfo Toro QuiroZAún no hay calificaciones
- Problemas Video Clase 8Documento21 páginasProblemas Video Clase 8Geoicb IngenierosAún no hay calificaciones
- s01.s1. - Elasticidad y Resistencia de Materiales - Ciclo-Agosto-clases - 24!08!2020Documento82 páginass01.s1. - Elasticidad y Resistencia de Materiales - Ciclo-Agosto-clases - 24!08!2020Roberto Quispe EscarcenaAún no hay calificaciones
- Parcial Corte N°2 - Segunda Parte Resistencia de MaterialesDocumento2 páginasParcial Corte N°2 - Segunda Parte Resistencia de MaterialesMevis Grettell Guerrero PoloAún no hay calificaciones
- T2 TecCONCRETODocumento4 páginasT2 TecCONCRETOMarcoAntonioGutierrezCanalesAún no hay calificaciones
- Laboratorio N ViscocidadDocumento11 páginasLaboratorio N ViscocidadCecilia Aldana GuadalupeAún no hay calificaciones
- E6.5 Esfuerzo Cortante Máximo Ejercicio 1Documento4 páginasE6.5 Esfuerzo Cortante Máximo Ejercicio 1EDGAR VEGA ORTIZAún no hay calificaciones
- PC02 - MciDocumento3 páginasPC02 - MciCecilia Aldana GuadalupeAún no hay calificaciones
- FRICCIÓnDocumento2 páginasFRICCIÓnKevin Vilca PariAún no hay calificaciones
- Esfuerzos en vigas y columnasDocumento8 páginasEsfuerzos en vigas y columnasTonyAndrade0% (2)
- S15.s1 - Práctica Calificada 3 ViDocumento2 páginasS15.s1 - Práctica Calificada 3 Vicesar manrique aedoAún no hay calificaciones
- Examen T1 DinamicaDocumento7 páginasExamen T1 DinamicaCesar Mestanza TerronesAún no hay calificaciones
- Ecuaciones diferenciales en biologíaDocumento8 páginasEcuaciones diferenciales en biologíasykoAún no hay calificaciones
- Diseño Conceptual Caja Reductora - Avance 1Documento21 páginasDiseño Conceptual Caja Reductora - Avance 1Kennedy Vargas MarceloAún no hay calificaciones
- S02.s2 - Principios de Velocidad y Aceleración en Mecanismos - Parte 02 (Solucionario)Documento18 páginasS02.s2 - Principios de Velocidad y Aceleración en Mecanismos - Parte 02 (Solucionario)JonathanCatariAún no hay calificaciones
- S14.s28 - Ejercicio 01Documento9 páginasS14.s28 - Ejercicio 01Dickter Alberto Zarpan VasquezAún no hay calificaciones
- Sólidos - Laboratorio 03Documento13 páginasSólidos - Laboratorio 03timoteo cruz pumacallahuiAún no hay calificaciones
- La Agraria - Centroide y Centro de Gravedad - Ejercicios 01-03 (Solucionario)Documento13 páginasLa Agraria - Centroide y Centro de Gravedad - Ejercicios 01-03 (Solucionario)Josue Larsenn ParionaAún no hay calificaciones
- La Agraria - S04.s1 - Engranajes Cilíndricos de Dientes Rectos - Ejercicio 03Documento4 páginasLa Agraria - S04.s1 - Engranajes Cilíndricos de Dientes Rectos - Ejercicio 03Nadine Clayre Collado PachecoAún no hay calificaciones
- Tarea 01-HID-Capítulo 1Documento1 páginaTarea 01-HID-Capítulo 1Nadine Clayre Collado PachecoAún no hay calificaciones
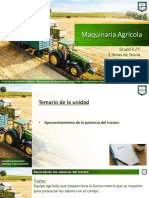
- T5-Aprovechamiento de La Potencia Del Tractor-ComprimidoDocumento55 páginasT5-Aprovechamiento de La Potencia Del Tractor-ComprimidoNadine Clayre Collado PachecoAún no hay calificaciones
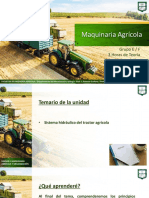
- Sistema hidráulico tractor agrícolaDocumento26 páginasSistema hidráulico tractor agrícolaNadine Clayre Collado PachecoAún no hay calificaciones
- Riego Por SurcosDocumento23 páginasRiego Por SurcosNadine Clayre Collado PachecoAún no hay calificaciones
- T5-Aprovechamiento de La Potencia Del Tractor-ComprimidoDocumento52 páginasT5-Aprovechamiento de La Potencia Del Tractor-ComprimidoNadine Clayre Collado PachecoAún no hay calificaciones
- Taller N°4Documento17 páginasTaller N°4Nadine Clayre Collado PachecoAún no hay calificaciones
- Riego Por MelgasDocumento19 páginasRiego Por MelgasNadine Clayre Collado PachecoAún no hay calificaciones
- T2-Clasificación de Maquinaria AgrícolaDocumento22 páginasT2-Clasificación de Maquinaria AgrícolaNadine Clayre Collado PachecoAún no hay calificaciones
- Examen Final Problema Riegos IDocumento1 páginaExamen Final Problema Riegos INadine Clayre Collado PachecoAún no hay calificaciones
- Intercambio Termico - Crianza de Vacas - CasagrandeDocumento37 páginasIntercambio Termico - Crianza de Vacas - CasagrandeNadine Clayre Collado PachecoAún no hay calificaciones
- Problema Examen FinalDocumento3 páginasProblema Examen FinalNadine Clayre Collado PachecoAún no hay calificaciones
- T2-Clasificación de Maquinaria AgrícolaDocumento22 páginasT2-Clasificación de Maquinaria AgrícolaNadine Clayre Collado PachecoAún no hay calificaciones
- El Tractor Agrícola.Documento26 páginasEl Tractor Agrícola.jeryjeryjeryAún no hay calificaciones
- 1553 8717 2 PBDocumento30 páginas1553 8717 2 PBMiguel VillonAún no hay calificaciones
- Sesión20 - Unidad-10-Precipitación Escorrentia1Documento41 páginasSesión20 - Unidad-10-Precipitación Escorrentia1Nadine Clayre Collado PachecoAún no hay calificaciones
- Dialnet AnalisisDePoblacionesDeMicorrizasEnMaizZeaMaysCult 5624768 PDFDocumento10 páginasDialnet AnalisisDePoblacionesDeMicorrizasEnMaizZeaMaysCult 5624768 PDFcolinaboAún no hay calificaciones
- Trabajo 9 Modelacion Tambo CaracochaDocumento43 páginasTrabajo 9 Modelacion Tambo CaracochaNadine Clayre Collado PachecoAún no hay calificaciones
- Análisis Dinámico Hotel ComercioDocumento24 páginasAnálisis Dinámico Hotel ComercioDaniel AlanizAún no hay calificaciones
- Condiciones de Trabajo Seguridad y Salud Ocupacional en La Mineria Del PeruDocumento248 páginasCondiciones de Trabajo Seguridad y Salud Ocupacional en La Mineria Del PeruMartin Zevallos100% (2)
- 92-Texto Del Artículo-251-1-10-20131222 PDFDocumento10 páginas92-Texto Del Artículo-251-1-10-20131222 PDFL Ramos RiveraAún no hay calificaciones
- El Artículo CientíficoDocumento17 páginasEl Artículo CientíficoNadine Clayre Collado PachecoAún no hay calificaciones
- Oficio Mult.-00068-2021-Minedu-Informe Sobre Lab.Documento1 páginaOficio Mult.-00068-2021-Minedu-Informe Sobre Lab.Nadine Clayre Collado PachecoAún no hay calificaciones
- Exm Final Cordova Palacios HaroldDocumento29 páginasExm Final Cordova Palacios HaroldNadine Clayre Collado PachecoAún no hay calificaciones
- Análisis ProximidadDocumento17 páginasAnálisis ProximidadNadine Clayre Collado PachecoAún no hay calificaciones
- Resumen Bandas Formulas Landsat 7 Trabajo Sabado 14Documento4 páginasResumen Bandas Formulas Landsat 7 Trabajo Sabado 14Nadine Clayre Collado PachecoAún no hay calificaciones
- Actividades Previas A La EscrituraDocumento2 páginasActividades Previas A La EscrituraNadine Clayre Collado PachecoAún no hay calificaciones
- ExamenFinal 2021-01Documento3 páginasExamenFinal 2021-01Nadine Clayre Collado PachecoAún no hay calificaciones
- Collage y Cuadro ComparativoDocumento2 páginasCollage y Cuadro ComparativoJuan Jose Guzman MorenoAún no hay calificaciones
- Elt 2410 Lab 1Documento18 páginasElt 2410 Lab 1GonzaloAún no hay calificaciones
- Lanzamiento por ocupación de hechoDocumento18 páginasLanzamiento por ocupación de hechoAlberto DiazAún no hay calificaciones
- Ejercicios EGELDocumento21 páginasEjercicios EGELloganAún no hay calificaciones
- Normas ambientales cementoDocumento24 páginasNormas ambientales cementoCristianTigsilemaAún no hay calificaciones
- Irimo Catalogo 2017Documento104 páginasIrimo Catalogo 2017José PerezAún no hay calificaciones
- Mi infancia y sueñosDocumento2 páginasMi infancia y sueñosCesar GaliciaAún no hay calificaciones
- Lab 3Documento2 páginasLab 3sextosotano0% (1)
- FORMATO DE UN Formulario de LICENCIA DE PUBLICIDAD EXTERIORDocumento2 páginasFORMATO DE UN Formulario de LICENCIA DE PUBLICIDAD EXTERIORLaura Melchora Acosta Mozombite67% (3)
- Prueba 3 Electronica Analogica DigitalDocumento15 páginasPrueba 3 Electronica Analogica DigitalArco Negro100% (3)
- Analisis ForenseDocumento66 páginasAnalisis ForenseLuis AhumadaAún no hay calificaciones
- Guia - de - Aprenizaje Fundamentos Del SG-SSTDocumento14 páginasGuia - de - Aprenizaje Fundamentos Del SG-SSTcristian mateoAún no hay calificaciones
- Actividad de Aprendizaje 4Documento2 páginasActividad de Aprendizaje 4carlos alberto llanos manriqueAún no hay calificaciones
- Informe SIT 2022Documento8 páginasInforme SIT 2022Oscar Jose Mejia MarzucaAún no hay calificaciones
- Trabajo SpiDocumento19 páginasTrabajo SpiFranek Mur BetonAún no hay calificaciones
- Actividad Sopa de Letras Costos...Documento3 páginasActividad Sopa de Letras Costos...ñolo100% (1)
- Fallas de culata y válvulas en motoresDocumento8 páginasFallas de culata y válvulas en motoresCesar VillanuevaAún no hay calificaciones
- Características Físicas, Químicas y Biológicas de LasDocumento8 páginasCaracterísticas Físicas, Químicas y Biológicas de LasMargoth ClementeAún no hay calificaciones
- Donación de Cosa AjenaDocumento2 páginasDonación de Cosa AjenaJuan C OrellanaAún no hay calificaciones
- Plan Nacional de Seguridad Ciudadana 2019-2023 06-06-2023Documento19 páginasPlan Nacional de Seguridad Ciudadana 2019-2023 06-06-2023johanAún no hay calificaciones
- Actividad 3. Servidores de Red PDFDocumento11 páginasActividad 3. Servidores de Red PDFAlvarito Ramos GaciaAún no hay calificaciones
- Sesion 5 ASIENTOS CONTABLES AGROPECUARIOSDocumento20 páginasSesion 5 ASIENTOS CONTABLES AGROPECUARIOSBrunellaAlessandra0% (1)
- Diagnostico OrganizacionalDocumento22 páginasDiagnostico Organizacionalsofia florez caroAún no hay calificaciones
- La Importancia de Las Tic en La Educación-Pastor Javier Ochoa VargasDocumento4 páginasLa Importancia de Las Tic en La Educación-Pastor Javier Ochoa VargasJavier Ochoa VargasAún no hay calificaciones
- ¿No Conoces Ggpoker? Disfruta de La Mejor Experiencia de Juego en LíneaDocumento2 páginas¿No Conoces Ggpoker? Disfruta de La Mejor Experiencia de Juego en LíneaguillermoAún no hay calificaciones
- Uso Energias 5 BasicoDocumento33 páginasUso Energias 5 BasicoFelipe Alcaíno100% (1)
- FT By-PassDocumento1 páginaFT By-PassCORPORACION TECNOLOGICA NEW LINE SA DE CVAún no hay calificaciones
- Funcionamiento Farmacia HRAV 21 AbrilDocumento2 páginasFuncionamiento Farmacia HRAV 21 AbrilFernando Alonso Pardo SantanderAún no hay calificaciones
- Registro verificación válvulas controlDocumento2 páginasRegistro verificación válvulas controlLuis RodacruzAún no hay calificaciones
- Memoria PracticumDocumento53 páginasMemoria PracticumMónica Roman100% (1)