También podría gustarte
- Códigos ImprimirDocumento4 páginasCódigos ImprimirMickey MouseAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Chala Franchesca Minas Actividad1Documento4 páginasChala Franchesca Minas Actividad1Franchesca ChalaAún no hay calificaciones
- Código Matlab Doble Biela ManivelaDocumento4 páginasCódigo Matlab Doble Biela ManivelaELEONAIAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Trigonometria Sem 15Documento4 páginasTrigonometria Sem 15Willian PalominoAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Programa Desacoplado Rapiop en MatLabDocumento5 páginasPrograma Desacoplado Rapiop en MatLabTavo RodríguezAún no hay calificaciones
- R.T. de Ángulos en Posición NormalDocumento5 páginasR.T. de Ángulos en Posición NormalEdinsson R. Javier Villanueva100% (3)
- Practico 4 2022 SolDocumento2 páginasPractico 4 2022 SolNat PanAún no hay calificaciones
- PabónJosué DII2-1Documento24 páginasPabónJosué DII2-1Oscar OrtizAún no hay calificaciones
- Serie2 2012 1Documento21 páginasSerie2 2012 1Oscar MendozaAún no hay calificaciones
- Semana 6 TrigonometriaDocumento2 páginasSemana 6 TrigonometriaLeoner Juarez Cruz100% (1)
- Ángulos en Relación Con La CircunferenciaDocumento4 páginasÁngulos en Relación Con La CircunferenciaLuis Cano0% (1)
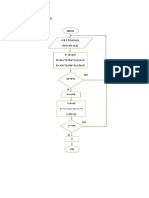
- Diagrama de FlujoDocumento2 páginasDiagrama de FlujoMarceloSarmientoCantosAún no hay calificaciones
- Serie 2Documento24 páginasSerie 2Jorge Luis Juarez Fuentes50% (2)
- Serie2 VectorialDocumento25 páginasSerie2 Vectorialsantanates911Aún no hay calificaciones
- 5ta Semanang Compuestos ProblemasDocumento6 páginas5ta Semanang Compuestos Problemasvegacarlos89Aún no hay calificaciones
- Trigonometria 3Documento8 páginasTrigonometria 3Peve RicardoAún no hay calificaciones
- Resolucion de La Unidad 3 - Reyes Infantes Jhontan AntonyDocumento9 páginasResolucion de La Unidad 3 - Reyes Infantes Jhontan AntonyJhonatan ReyesAún no hay calificaciones
- RT. Angulos StandarDocumento6 páginasRT. Angulos StandarjorgegonzalezvictoriaAún no hay calificaciones
- Guía Domiciliaria 1 - 6Documento13 páginasGuía Domiciliaria 1 - 6LuisJose Vereau AguileraAún no hay calificaciones
- Lab6 EDODocumento20 páginasLab6 EDOCatalinaCardenasAún no hay calificaciones
- Geo - Trigo0 05circunferencia Reduccion I CuadranteDocumento5 páginasGeo - Trigo0 05circunferencia Reduccion I CuadrantePedro Luis CJAún no hay calificaciones
- Ejercicios MecanismosDocumento22 páginasEjercicios MecanismosMarleneAún no hay calificaciones
- Bloque 3 Geometria Analitica Plana PDFDocumento9 páginasBloque 3 Geometria Analitica Plana PDFNena DuranAún no hay calificaciones
- 5.T - R3 - R. T. de Ángulos en Posición NormalDocumento3 páginas5.T - R3 - R. T. de Ángulos en Posición NormalNicole MelannieAún no hay calificaciones
- Repaso Mat LabDocumento10 páginasRepaso Mat LabAlexis CorreaAún no hay calificaciones
- Boletin TrigonometriaDocumento5 páginasBoletin Trigonometriakilopkojip100% (1)
- 06 - Reducción Al Primer Cuadrante PDFDocumento10 páginas06 - Reducción Al Primer Cuadrante PDFmatinasho100% (1)
- Mi Formulario de Geometria Analitica 2022Documento9 páginasMi Formulario de Geometria Analitica 2022Fer SantillanAún no hay calificaciones
- Tema 1Documento2 páginasTema 1theone27Aún no hay calificaciones
- Practica AlgebraDocumento62 páginasPractica AlgebraJuani ClarianaAún no hay calificaciones
- Reducción Al Primer Cuadrante (Propuestos)Documento1 páginaReducción Al Primer Cuadrante (Propuestos)Angel Francisco Roman RosilloAún no hay calificaciones
- CurvaDocumento3 páginasCurvaJohann Huerta RamosAún no hay calificaciones
- TrigonometríaDocumento44 páginasTrigonometríaJhon Andy Ramos100% (1)
- Angulo DobleDocumento5 páginasAngulo DobleDavey AtmeAún no hay calificaciones
- Solucionario Examen Recuperatorio G 1 2020 Diseño de SistemasDocumento5 páginasSolucionario Examen Recuperatorio G 1 2020 Diseño de SistemasCristian ChoZegAún no hay calificaciones
- Problemas y Ejercicios de Algebra Lineal Ccesa007Documento44 páginasProblemas y Ejercicios de Algebra Lineal Ccesa007Demetrio Ccesa RaymeAún no hay calificaciones
- Tabela CGs e Momentos de InerciaDocumento12 páginasTabela CGs e Momentos de InerciaGabriel FontesAún no hay calificaciones
- Razones Trigonométricas de Ángulos de Cualquier Magnitud IDocumento13 páginasRazones Trigonométricas de Ángulos de Cualquier Magnitud Iangelpovis33% (3)
- Codigo Matlab Mecanismo de 4 BarrasDocumento7 páginasCodigo Matlab Mecanismo de 4 BarrasAna FernandaAún no hay calificaciones
- Cepuns 2013-II Semana 06Documento6 páginasCepuns 2013-II Semana 06boc_55Aún no hay calificaciones
- Ejec 1 Mat PDFDocumento4 páginasEjec 1 Mat PDFIsay Cabrera AlvarezAún no hay calificaciones
- 2019 Mayo P2 TZ2Documento6 páginas2019 Mayo P2 TZ2Kerly SinmalezaAún no hay calificaciones
- CALCDocumento5 páginasCALCLauren OyolaAún no hay calificaciones
- Razones Trigonometricas PDFDocumento4 páginasRazones Trigonometricas PDFprofitozeusAún no hay calificaciones
- CAP8 Integral Linea Integral SuperficieDocumento65 páginasCAP8 Integral Linea Integral SuperficieWalter JerezanoAún no hay calificaciones
- t09 Semestral Tarea Razones Trigonométricas de Ángulos Agudos de CualquierDocumento4 páginast09 Semestral Tarea Razones Trigonométricas de Ángulos Agudos de CualquierRenzo SantillanAún no hay calificaciones
- P2analisisnumerico 1071150Documento21 páginasP2analisisnumerico 1071150Jarixander Perez RomeroAún no hay calificaciones
- Puente PeatonalDocumento28 páginasPuente PeatonalConstanza Ariadna Cornejo PazAún no hay calificaciones
- 2º Seminario de Trigonometría PREUNIVERSITARIO-2007-I-SaraDocumento11 páginas2º Seminario de Trigonometría PREUNIVERSITARIO-2007-I-SaraAristoteles Socrates Moreno GoñeAún no hay calificaciones
- Productos Notables II 2021Documento13 páginasProductos Notables II 2021ALVARO APAZA CHOQUEAún no hay calificaciones
- Anual IntegralDocumento5 páginasAnual IntegralJhonatan GoAún no hay calificaciones
- Vias TerrestresDocumento44 páginasVias TerrestresJuan Carlos Aguilar SandovalAún no hay calificaciones
- Uso de Sas para Resolver Ejercicios de La Tarea Extraclase Numero 2Documento8 páginasUso de Sas para Resolver Ejercicios de La Tarea Extraclase Numero 2leoAún no hay calificaciones
- Parte 6Documento1 páginaParte 6leoAún no hay calificaciones
- Parte 9Documento1 páginaParte 9leoAún no hay calificaciones
- Parte 7Documento1 páginaParte 7leoAún no hay calificaciones
- Interes Compuesto Parte 1Documento1 páginaInteres Compuesto Parte 1leoAún no hay calificaciones
- Parte 10Documento1 páginaParte 10leoAún no hay calificaciones
- Interes Compuesto Parte 4Documento1 páginaInteres Compuesto Parte 4leoAún no hay calificaciones
- Informe de Practica 5Documento5 páginasInforme de Practica 5Juan Pablo Barbecho ChAún no hay calificaciones
- Guia N 1 Mer ExtentendidoDocumento2 páginasGuia N 1 Mer ExtentendidoKaren Maria Munoz RamirezAún no hay calificaciones
- Moon + Reader Pro - Guía CompletaDocumento13 páginasMoon + Reader Pro - Guía CompletaXavier Talavera CabezasAún no hay calificaciones
- S Q A TallerDocumento4 páginasS Q A Tallerapi-264113580Aún no hay calificaciones
- 1x18 Como Viste en La Clase de Procesos Podemos Correr de Manera Asíncrona ComandosDocumento6 páginas1x18 Como Viste en La Clase de Procesos Podemos Correr de Manera Asíncrona ComandosPao MejiaAún no hay calificaciones
- Funciones y Prestaciones Del Sistema ScadaDocumento4 páginasFunciones y Prestaciones Del Sistema ScadaNando Villanueva Paye0% (2)
- Configuracion de GUP Servers V2Documento13 páginasConfiguracion de GUP Servers V2Gustrago HerreraAún no hay calificaciones
- Plan Simon-UgelDocumento1 páginaPlan Simon-Ugelangelmc80Aún no hay calificaciones
- DO-SRP350-Manual de Integracion PDFDocumento67 páginasDO-SRP350-Manual de Integracion PDFEdgarBoscanAún no hay calificaciones
- Introduccion A La Programacion en CDocumento196 páginasIntroduccion A La Programacion en CdavidAún no hay calificaciones
- Resumen Multimedia EducativaDocumento5 páginasResumen Multimedia Educativalucero alejandraAún no hay calificaciones
- Caso Práctico Etapa de PlanificaciónDocumento12 páginasCaso Práctico Etapa de PlanificaciónPaulina PazAún no hay calificaciones
- Cómo Instalar Windows 10 en Un PenDriveDocumento1 páginaCómo Instalar Windows 10 en Un PenDriveEdgar MartinezAún no hay calificaciones
- TERMINOS DE REFERENCIA CementerioDocumento9 páginasTERMINOS DE REFERENCIA CementerioManuel Cutimbo PalaciosAún no hay calificaciones
- UNIDAD4 IA Satisfaccion de RestriccionesDocumento4 páginasUNIDAD4 IA Satisfaccion de Restriccionesmv8389Aún no hay calificaciones
- Actividad n.02 Creación de Una Red Peer To PeerDocumento6 páginasActividad n.02 Creación de Una Red Peer To PeerDaniel NietoAún no hay calificaciones
- Tutorial para Jingling EspanolDocumento5 páginasTutorial para Jingling EspanolTraid1992Aún no hay calificaciones
- Primer Material de Manejo de SoftwareDocumento9 páginasPrimer Material de Manejo de SoftwareAlexander DíazAún no hay calificaciones
- 7 MaPro-MantenimientoElectromecánicoDocumento112 páginas7 MaPro-MantenimientoElectromecánicorocanuxAún no hay calificaciones
- Etp Tarea Conservacion de La Informacion Antivirus 7Documento4 páginasEtp Tarea Conservacion de La Informacion Antivirus 7Rocio SosaAún no hay calificaciones
- Informe Final Mining LabDocumento27 páginasInforme Final Mining LabAnthony Yosimar Vasquez SelisAún no hay calificaciones
- Drone Phantom 08 AbrilDocumento3 páginasDrone Phantom 08 AbrilRonal DarwinAún no hay calificaciones
- 02 Memoria Inventario VialDocumento12 páginas02 Memoria Inventario VialKeny UgarteAún no hay calificaciones
- EVA3-Planificación (Charlie López-Juan Olivares)Documento11 páginasEVA3-Planificación (Charlie López-Juan Olivares)Lopez ReyesAún no hay calificaciones
- Comando S Linux 2Documento112 páginasComando S Linux 2GaticoDeith100% (1)
- Rances Program t3Documento4 páginasRances Program t3Xofter TelloAún no hay calificaciones
- Winpak Galaxy Setup HelpDocumento3 páginasWinpak Galaxy Setup HelpSantiago HerreraAún no hay calificaciones
- VIP 110-24 Manual Sinwire Esp PDFDocumento132 páginasVIP 110-24 Manual Sinwire Esp PDFArmando Fernandez LeyvaAún no hay calificaciones
- Entrega de Cargo de JefeDocumento2 páginasEntrega de Cargo de Jefewmca28Aún no hay calificaciones
- Lab de Escalamiento de Señales Análogas Usando La Instruccion SCLDocumento26 páginasLab de Escalamiento de Señales Análogas Usando La Instruccion SCLBenjhy Jordan Castillo Valera100% (1)