También podría gustarte
- Chamaya Carhuatanta Roger Antonio y Guerrero Ortiz Héctor DaniloDocumento117 páginasChamaya Carhuatanta Roger Antonio y Guerrero Ortiz Héctor DaniloDidier Alexis JimenezAún no hay calificaciones
- Trabajo de IntegracionDocumento41 páginasTrabajo de IntegracionAlex ToapantaAún no hay calificaciones
- T Ucsg Pre Tec Ieca 71Documento124 páginasT Ucsg Pre Tec Ieca 71beilanAún no hay calificaciones
- Tesis 2Documento145 páginasTesis 2Chris Ian RaulAún no hay calificaciones
- Cocina SolarDocumento75 páginasCocina SolarJairo Hernando Rojas PulidoAún no hay calificaciones
- Tesis VenalumDocumento190 páginasTesis VenalumcristianAún no hay calificaciones
- Diseño de Guía Técnica Aplicativa para Alumbrado Artificial en Zonas EcológicasDocumento111 páginasDiseño de Guía Técnica Aplicativa para Alumbrado Artificial en Zonas EcológicasCRISTHIAN RIOSAún no hay calificaciones
- Universidad Técnica de Cotopaxi: Propuesta TecnológicaDocumento232 páginasUniversidad Técnica de Cotopaxi: Propuesta TecnológicaLayla Ramírez BustamanteAún no hay calificaciones
- Edwin Ramiro Echeverre MendozaDocumento94 páginasEdwin Ramiro Echeverre MendozaJoshe RmfAún no hay calificaciones
- Coello NuDocumento119 páginasCoello NuArnold Arroyo CalderónAún no hay calificaciones
- Tesis de - Baque Toro Alex WladimirDocumento119 páginasTesis de - Baque Toro Alex WladimirborrarAún no hay calificaciones
- Tesis FibraDocumento172 páginasTesis FibraVero Aja AjaAún no hay calificaciones
- Tesis Andres Garcia OriginalDocumento117 páginasTesis Andres Garcia OriginalSARMIENTO GOMEZ DARWIN JOELAún no hay calificaciones
- Ups CT006505Documento117 páginasUps CT006505JORGEAún no hay calificaciones
- Identificación de Causas de Retraso en La Obra El Túnel de La LínDocumento110 páginasIdentificación de Causas de Retraso en La Obra El Túnel de La Línmateo mejiaAún no hay calificaciones
- Soto Granda, Juan AndrésDocumento97 páginasSoto Granda, Juan Andréskev.fer2005Aún no hay calificaciones
- Estabilidad TesisDocumento156 páginasEstabilidad TesisLuis Jonathan Bahamaca FernandezAún no hay calificaciones
- LezcanoDocumento263 páginasLezcanoRICARDO ALFREDO PALOMINO HUAYNALAYAAún no hay calificaciones
- T Espel Emi 0402Documento173 páginasT Espel Emi 0402Rafael MartyAún no hay calificaciones
- Tesis 18 12 17 FinalDocumento212 páginasTesis 18 12 17 FinalAvila JorgeAún no hay calificaciones
- Ups GT002574Documento201 páginasUps GT002574Brenda AguilarAún no hay calificaciones
- Ups - ST003383 PDFDocumento99 páginasUps - ST003383 PDFYEISON EDUARDO CAICEDO GARZONAún no hay calificaciones
- Memoria Tecnica - Máquina Recicladora de Botellas Pet - Aldás, Araujo, Carvajal C. - Castro - 3eDocumento161 páginasMemoria Tecnica - Máquina Recicladora de Botellas Pet - Aldás, Araujo, Carvajal C. - Castro - 3eKsiSantoAún no hay calificaciones
- Rincón Rincón Maria Juliana 2021.Documento97 páginasRincón Rincón Maria Juliana 2021.Catherine BlancoAún no hay calificaciones
- T Ulvr 2993Documento147 páginasT Ulvr 2993Gary MoreiraAún no hay calificaciones
- Alacaldia de ChiaDocumento53 páginasAlacaldia de ChiaLUIS MANUEL JIMENEZAún no hay calificaciones
- Diseño de Una Red de Computadores para La Corporación Universitaria de La CostaDocumento218 páginasDiseño de Una Red de Computadores para La Corporación Universitaria de La CostawsucasaireAún no hay calificaciones
- Trabajo de Instalaciones Elctricas MonograficoDocumento14 páginasTrabajo de Instalaciones Elctricas MonograficoCreativa CreativaAún no hay calificaciones
- 04 Mel 084 Trabajo GradoDocumento123 páginas04 Mel 084 Trabajo GradogucaAún no hay calificaciones
- Diseño e Implementación de Un Prototipo de Router CNC Portátil para El Maquinado de Superficies de MaderaDocumento171 páginasDiseño e Implementación de Un Prototipo de Router CNC Portátil para El Maquinado de Superficies de MaderaEverAngelAún no hay calificaciones
- Calderón Rodríguez, Eder EduardoDocumento200 páginasCalderón Rodríguez, Eder EduardoYURIAún no hay calificaciones
- TD-1914 - Fernandez Apaza, Noe EliezerDocumento331 páginasTD-1914 - Fernandez Apaza, Noe Eliezermartin peñalozaAún no hay calificaciones
- Mplementación de Un Enlace de Comunicaciones Basado en Principios de Sistemas de RadioDocumento109 páginasMplementación de Un Enlace de Comunicaciones Basado en Principios de Sistemas de RadioMarcosZelayaAún no hay calificaciones
- Baque Chilán Katherine LissethDocumento114 páginasBaque Chilán Katherine LissethAlvaro QuintanaAún no hay calificaciones
- IFP Bryan Blanco. Rev.2Documento120 páginasIFP Bryan Blanco. Rev.2Bryan BlancoAún no hay calificaciones
- Proyecto Final Cordoba Ordoñez Sistema Híbrodo de Energización.Documento49 páginasProyecto Final Cordoba Ordoñez Sistema Híbrodo de Energización.Julian David Ordo�ez Acosta [Estudiante]Aún no hay calificaciones
- T Espel Emi 0361Documento155 páginasT Espel Emi 0361Ivan Garcia PancorboAún no hay calificaciones
- Collar GPSDocumento162 páginasCollar GPSMatiasBenjaminLunaAún no hay calificaciones
- CD 4624Documento154 páginasCD 4624Jade RomeroAún no hay calificaciones
- T Espel Mec 0203Documento235 páginasT Espel Mec 0203osman perez vidalAún no hay calificaciones
- TRABAJO DE TITULACION-NachoDocumento134 páginasTRABAJO DE TITULACION-Nachomaria gabriela espinoza bravoAún no hay calificaciones
- AeroponíaDocumento163 páginasAeroponíaRonald AcostaAún no hay calificaciones
- TK7872.L64.2021-2772 UnlockedDocumento88 páginasTK7872.L64.2021-2772 UnlockedrobertoAún no hay calificaciones
- 4ta Rev 14-02-23 FinDocumento85 páginas4ta Rev 14-02-23 FinCarmela EspinosaAún no hay calificaciones
- Diseño de Laboratorio de Aguas Como Aprendizaje en El AreaDocumento82 páginasDiseño de Laboratorio de Aguas Como Aprendizaje en El AreaaticampodonicoAún no hay calificaciones
- RV M 040000401Documento109 páginasRV M 040000401Cruech Tauro FeatchAún no hay calificaciones
- Ups CT008416Documento294 páginasUps CT008416Juan Pablo Leon RualesAún no hay calificaciones
- T Espe 052480Documento105 páginasT Espe 052480jhasminAún no hay calificaciones
- Estructura Del Informe Del TAP-Elec (1) (1) FinalDocumento23 páginasEstructura Del Informe Del TAP-Elec (1) (1) FinalCARLOS DECOAún no hay calificaciones
- Universidad de Oriente Núcleo de Anzoátegui Escuela de Ingeniería y Ciencias Aplicadas Departamento de ElectricidadDocumento191 páginasUniversidad de Oriente Núcleo de Anzoátegui Escuela de Ingeniería y Ciencias Aplicadas Departamento de Electricidadelias2505Aún no hay calificaciones
- LojaDocumento158 páginasLojaAnonymous 51TELNSupeAún no hay calificaciones
- Iluminacion KarlaDocumento49 páginasIluminacion KarlaKARLA MARIA RAMIREZ JARABAAún no hay calificaciones
- PDFDocumento52 páginasPDFMaría Cristina HenaoAún no hay calificaciones
- T Uce 0012 223 PDFDocumento181 páginasT Uce 0012 223 PDFborAún no hay calificaciones
- Pi 000778 PDFDocumento83 páginasPi 000778 PDFJesicaCruzArancibiaAún no hay calificaciones
- Proyecto Riego Por AspersiónDocumento63 páginasProyecto Riego Por AspersiónMikey J. Tello ReyesAún no hay calificaciones
- Proyecto de GradoDocumento76 páginasProyecto de Gradolina gonzalezAún no hay calificaciones
- Diseno Sistema Acondicionamiento Aire VentilacionDocumento164 páginasDiseno Sistema Acondicionamiento Aire VentilacionJOSE QUIROAAún no hay calificaciones
- ARDUINO: Aplicado en Robótica, Mecatrónica e IngenieríasDe EverandARDUINO: Aplicado en Robótica, Mecatrónica e IngenieríasAún no hay calificaciones
- Prueba 1 Ejercicio 2 RomanDocumento5 páginasPrueba 1 Ejercicio 2 RomanRoman GarciaAún no hay calificaciones
- Ejercicios SubnateoDocumento1 páginaEjercicios SubnateoRoman GarciaAún no hay calificaciones
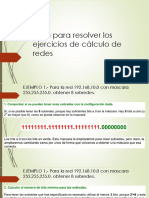
- Guía para Resolver Los Ejercicios de Cálculo deDocumento18 páginasGuía para Resolver Los Ejercicios de Cálculo deRoman GarciaAún no hay calificaciones
- Informe Lab 1Documento24 páginasInforme Lab 1Roman GarciaAún no hay calificaciones
- T 3Documento2 páginasT 3Roman GarciaAún no hay calificaciones
- IndustrialDocumento9 páginasIndustrialEnzo ArrascoAún no hay calificaciones
- Switch AdministrablesDocumento7 páginasSwitch AdministrablesSebastiam Paredes100% (2)
- Programacion de ComputadorasDocumento143 páginasProgramacion de ComputadorasAndrea CruzAún no hay calificaciones
- MITM Conexiones FTPDocumento4 páginasMITM Conexiones FTPEins Ortiz MoralesAún no hay calificaciones
- Separata de EjerciciosDocumento5 páginasSeparata de EjerciciosLexMengasAún no hay calificaciones
- Lon GK GK523F Esp 12 - 04 - 16Documento12 páginasLon GK GK523F Esp 12 - 04 - 16cocer2318Aún no hay calificaciones
- Tutorial de CircuitMaker 6Documento7 páginasTutorial de CircuitMaker 6Jesus Revollo VargasAún no hay calificaciones
- Funcion de La LogisticaDocumento7 páginasFuncion de La LogisticaMon MagañaAún no hay calificaciones
- Proyecto Inter 3 2do Sem 2020Documento3 páginasProyecto Inter 3 2do Sem 2020tepaz solaresAún no hay calificaciones
- Curso WordpadDocumento38 páginasCurso WordpadJoseph Sedano PeralesAún no hay calificaciones
- Apuntes de Electronica III-extendidaDocumento247 páginasApuntes de Electronica III-extendidaAlbertoAún no hay calificaciones
- Competencias A DesarrollarDocumento6 páginasCompetencias A DesarrollarEdna Paola Chavez GuerraAún no hay calificaciones
- DFD1 DrawioDocumento4 páginasDFD1 DrawioCimar DíazAún no hay calificaciones
- Manual QLED PDFDocumento27 páginasManual QLED PDFRicardo Andres Bowen HolguinAún no hay calificaciones
- Maquinas VirtualesDocumento7 páginasMaquinas Virtualesrenato isaias ivan tarcayaAún no hay calificaciones
- Certificado DcsDocumento8 páginasCertificado DcsLuis AngelAún no hay calificaciones
- Temario - Calidad de La Energía-1Documento5 páginasTemario - Calidad de La Energía-1elmer18Aún no hay calificaciones
- Cesar Gomez Uribe Control 8 Plan de NegociosDocumento5 páginasCesar Gomez Uribe Control 8 Plan de NegociosCesar Gomez UAún no hay calificaciones
- Revista Ure 2017 01Documento84 páginasRevista Ure 2017 01enriqueunoAún no hay calificaciones
- Análisis II - Integrales Impropias Con GráficosDocumento22 páginasAnálisis II - Integrales Impropias Con GráficosMery BladieAún no hay calificaciones
- Tarea Semana 5 David Gonzalez Coroseo Control Estadistico de Procesos Iacc 02122018Documento11 páginasTarea Semana 5 David Gonzalez Coroseo Control Estadistico de Procesos Iacc 02122018Jose Dominguez FuentesAún no hay calificaciones
- Primera Entrega Gestion de La SeguridadDocumento13 páginasPrimera Entrega Gestion de La Seguridaddeiner100% (1)
- EIQD-PRO-TG-001 Procedimiento DI SIDocumento4 páginasEIQD-PRO-TG-001 Procedimiento DI SIMajo27Aún no hay calificaciones
- Normativa PeruanaDocumento29 páginasNormativa PeruanaJosephPierreAnayaVelaAún no hay calificaciones
- Mantenimiento PBC PMRDocumento59 páginasMantenimiento PBC PMRryr6ascensoresAún no hay calificaciones
- Unidad 2. Gestion de Aplicaciones, RecursosDocumento60 páginasUnidad 2. Gestion de Aplicaciones, RecursosJasso Xa-amjrAún no hay calificaciones
- Saberes Fisica 10 Funcion LinealDocumento2 páginasSaberes Fisica 10 Funcion LinealLaura PintoAún no hay calificaciones
- Multimedia RSVPDocumento51 páginasMultimedia RSVPZurita JeysonAún no hay calificaciones
- Manual Medion Erazer X7813Documento108 páginasManual Medion Erazer X7813alkazarinAún no hay calificaciones
- Examen - (APEB1-15%) Caso Práctico 1 - Desarrolle El Ejercicio Práctico 4.14 Del Texto Básico, Relacionado Con Una Empresa ManufactureraDocumento3 páginasExamen - (APEB1-15%) Caso Práctico 1 - Desarrolle El Ejercicio Práctico 4.14 Del Texto Básico, Relacionado Con Una Empresa ManufactureraAlisson Carrasco100% (1)