También podría gustarte
- Ecuaciones de figuras geométricas planasDocumento23 páginasEcuaciones de figuras geométricas planasKenyi Hidalgo Diaz33% (3)
- Metodos de La CuerdasDocumento11 páginasMetodos de La CuerdasGiancarlo Antoine Mudarra ValdiviaAún no hay calificaciones
- TEMA 10. Diedrico - Directo FUNDAMENTOSDocumento41 páginasTEMA 10. Diedrico - Directo FUNDAMENTOSGarbiñe LarraldeAún no hay calificaciones
- Flujo de Trabajo Agisoft Metashape Con Puntos de Control Terrestre - 10!08!21Documento45 páginasFlujo de Trabajo Agisoft Metashape Con Puntos de Control Terrestre - 10!08!21Liz Aguilar Vásquez100% (1)
- Cap 4 Foto Inclinada ApunteDocumento17 páginasCap 4 Foto Inclinada ApunteOky Agustin Suparo TajiriAún no hay calificaciones
- Definiciones clave foto aéreaDocumento5 páginasDefiniciones clave foto aéreaKarol Mendez100% (1)
- Documento 2c2b0 Previo de Fotogrametrc3adaDocumento33 páginasDocumento 2c2b0 Previo de Fotogrametrc3adaFrancisco Gallegos RanillaAún no hay calificaciones
- Pregunta 4Documento35 páginasPregunta 4Vladimir Gonzales TaipeAún no hay calificaciones
- Secciones cónicas: hipérbola, elipse, parábola y sus elementosDocumento17 páginasSecciones cónicas: hipérbola, elipse, parábola y sus elementosYesith GongoraAún no hay calificaciones
- Tema N°2 Geometría de Las Fotografías Aéreas (2021)Documento16 páginasTema N°2 Geometría de Las Fotografías Aéreas (2021)Leo AgüeroAún no hay calificaciones
- PARABOLADocumento7 páginasPARABOLADamaris Rocío Villca SolizAún no hay calificaciones
- Distancias entre figuras geométricasDocumento22 páginasDistancias entre figuras geométricasJhulinio FuentesAún no hay calificaciones
- Superficies de revoluciónDocumento8 páginasSuperficies de revoluciónbedu69Aún no hay calificaciones
- Introducción A La FotogrametríaDocumento30 páginasIntroducción A La FotogrametríaMarcela AmayaAún no hay calificaciones
- Temas Especiales en Topografía PrácticaDocumento57 páginasTemas Especiales en Topografía PrácticaRoberto EAún no hay calificaciones
- S15.s2 - MaterialDocumento26 páginasS15.s2 - MaterialDiego Estefano Pichihua CarreraAún no hay calificaciones
- Documento Sin TítuloDocumento5 páginasDocumento Sin TítuloAracely JkzAún no hay calificaciones
- Proyecciones EstereográficasDocumento29 páginasProyecciones EstereográficasbenjaminAún no hay calificaciones
- 5-Proyeccion AxonometricaDocumento6 páginas5-Proyeccion AxonometricaAdrian GarciaAún no hay calificaciones
- Semana 12a Distancia Entre Dos Rectas Cruzadas Teoría 2021Documento26 páginasSemana 12a Distancia Entre Dos Rectas Cruzadas Teoría 2021FlorianPonceAún no hay calificaciones
- ParabolaDocumento5 páginasParabolasueco4933Aún no hay calificaciones
- Proyecciones OrtogonalesDocumento52 páginasProyecciones OrtogonalesJuliana MoralesAún no hay calificaciones
- Otra Perspectiva ConicaDocumento17 páginasOtra Perspectiva ConicadevtasAún no hay calificaciones
- Conociendo la ParábolaDocumento7 páginasConociendo la ParábolaDaniel Alexander Hernandez JuarezAún no hay calificaciones
- Clase 11 Secciones ConicasDocumento8 páginasClase 11 Secciones ConicasAnderson ReyesAún no hay calificaciones
- Sistemas Representacion Tercero Eso PDFDocumento5 páginasSistemas Representacion Tercero Eso PDFCarolina LocatelliAún no hay calificaciones
- Abatimiento y RebatimientoDocumento14 páginasAbatimiento y RebatimientoAdolfo Arandia RicoAún no hay calificaciones
- Superficies de Revolucion IDocumento24 páginasSuperficies de Revolucion ILuis Angel Villanueva ZeballosAún no hay calificaciones
- PARÁBOLADocumento5 páginasPARÁBOLANayeli SolerAún no hay calificaciones
- Parábolas, hipérbolas y elipses: formas geométricasDocumento16 páginasParábolas, hipérbolas y elipses: formas geométricasJhon GmbAún no hay calificaciones
- Hipérbolas en diseños y prediccionesDocumento2 páginasHipérbolas en diseños y prediccionesLeonelAún no hay calificaciones
- Fotogrametria Aerea ExposicionDocumento29 páginasFotogrametria Aerea ExposicionluisAún no hay calificaciones
- T54 2Documento20 páginasT54 2Alejandro Alonso CapelAún no hay calificaciones
- La Hipérbola: Fundamentos y elementos claveDocumento4 páginasLa Hipérbola: Fundamentos y elementos clavesueco4933Aún no hay calificaciones
- Proyecciones de rectas y sus posicionesDocumento224 páginasProyecciones de rectas y sus posicionesFernandoBPSAún no hay calificaciones
- s13.1 - Distancia Entre Dos Rectas CruzadasDocumento26 páginass13.1 - Distancia Entre Dos Rectas CruzadasLuis Nicolas Jimenez ChungaAún no hay calificaciones
- Orientación interior y exterior en fotogrametría: elementos y parámetrosDocumento6 páginasOrientación interior y exterior en fotogrametría: elementos y parámetrosDiego SalasAún no hay calificaciones
- Foto2 GGDocumento36 páginasFoto2 GGBryan ArenasAún no hay calificaciones
- Superficies geométricasDocumento25 páginasSuperficies geométricasEsdras Ademar Catacora OrtizAún no hay calificaciones
- CircunferenciaDocumento4 páginasCircunferenciaadrian SanchezAún no hay calificaciones
- Perpendicularidad en geometría descriptiva: planos y proyeccionesDocumento12 páginasPerpendicularidad en geometría descriptiva: planos y proyeccionesjorgeayesAún no hay calificaciones
- Geometría plana: figuras curvasDocumento30 páginasGeometría plana: figuras curvasLuiiz RamiirezAún no hay calificaciones
- 2 Homologia PDFDocumento9 páginas2 Homologia PDFbarmarbiAún no hay calificaciones
- PLANO Profa Ana PernaleteDocumento119 páginasPLANO Profa Ana PernaleteJesus SimancasAún no hay calificaciones
- La Parábola Es Una Sección CónicaDocumento7 páginasLa Parábola Es Una Sección CónicaKike Moreno AlfaroAún no hay calificaciones
- Guia Dibujo IDocumento46 páginasGuia Dibujo IÁngel CastilloAún no hay calificaciones
- Ecuación y elementos básicos de la circunferenciaDocumento54 páginasEcuación y elementos básicos de la circunferenciaErick Mujanajinsoy100% (1)
- Proyecciones de rectas y posiciones relativasDocumento217 páginasProyecciones de rectas y posiciones relativasFernandoBPSAún no hay calificaciones
- 14 - DT2Documento6 páginas14 - DT2Lía de MiguelAún no hay calificaciones
- Anexo 2 Modelo de Trabajo Correcto de Sistema de Representacion 1Documento12 páginasAnexo 2 Modelo de Trabajo Correcto de Sistema de Representacion 1nescarlyAún no hay calificaciones
- El PuntoDocumento14 páginasEl PuntoEduThony14Aún no hay calificaciones
- Unidad 4 - La ParábolaDocumento26 páginasUnidad 4 - La ParábolaGilberto Marín UribeAún no hay calificaciones
- Tema 9 La RectaDocumento9 páginasTema 9 La RectaManuel AcuñaAún no hay calificaciones
- IRAM 4501-2_2001Documento10 páginasIRAM 4501-2_2001DAMARYS OMAún no hay calificaciones
- Trazos AuxiliaresDocumento9 páginasTrazos AuxiliaresNILSERAún no hay calificaciones
- Teoria de La Proyeccion Del PuntoDocumento10 páginasTeoria de La Proyeccion Del PuntoAdriana Torres SanchezAún no hay calificaciones
- TAngentes A La ParábolaDocumento4 páginasTAngentes A La ParábolaPepita la florAún no hay calificaciones
- Topografia ResumenDocumento11 páginasTopografia ResumenMarceloAisaAún no hay calificaciones
- Generalidades y Representación de Punto, Recta y PlanoDocumento28 páginasGeneralidades y Representación de Punto, Recta y PlanoLaura RamirezAún no hay calificaciones
- Arcgis Nivel Intermedio ManualDocumento44 páginasArcgis Nivel Intermedio ManualLiz Aguilar VásquezAún no hay calificaciones
- Ordenamiento TerritorialDocumento6 páginasOrdenamiento TerritorialLiz Aguilar VásquezAún no hay calificaciones
- Arcgis Nivel Intermedio ManualDocumento44 páginasArcgis Nivel Intermedio ManualLiz Aguilar VásquezAún no hay calificaciones
- 15 Clase OT 2021 Gestion TerriroriaIDocumento40 páginas15 Clase OT 2021 Gestion TerriroriaILiz Aguilar VásquezAún no hay calificaciones
- Cap6 - Met. Church - Determ. de La Inc.Documento9 páginasCap6 - Met. Church - Determ. de La Inc.JoelDeLaCruzGonzalesAún no hay calificaciones
- 4 Principios de Vuelo-AerodinamicaDocumento88 páginas4 Principios de Vuelo-AerodinamicaLiz Aguilar VásquezAún no hay calificaciones
- Aplicaciones Del Turismo de Naturaleza en El PerúDocumento15 páginasAplicaciones Del Turismo de Naturaleza en El PerúLiz Aguilar VásquezAún no hay calificaciones
- MODULO 5-Las Técnicas de Remediación de SuelosDocumento43 páginasMODULO 5-Las Técnicas de Remediación de SuelosLiz Aguilar VásquezAún no hay calificaciones
- Planificacion y Rectificacion en Fotos AereasDocumento36 páginasPlanificacion y Rectificacion en Fotos AereasLiz Aguilar VásquezAún no hay calificaciones
- ECOTURISMO1Documento15 páginasECOTURISMO1Liz Aguilar VásquezAún no hay calificaciones
- 4 Principios de Vuelo-AerodinamicaDocumento88 páginas4 Principios de Vuelo-AerodinamicaLiz Aguilar VásquezAún no hay calificaciones
- Antecedentes Del Catastro Urbano en El Peru 19.07.2021Documento16 páginasAntecedentes Del Catastro Urbano en El Peru 19.07.2021Liz Aguilar VásquezAún no hay calificaciones
- Planificacion y Rectificacion en Fotos AereasDocumento36 páginasPlanificacion y Rectificacion en Fotos AereasLiz Aguilar VásquezAún no hay calificaciones
- 14 Clase OT 2021 Implementacion de POTDocumento31 páginas14 Clase OT 2021 Implementacion de POTLiz Aguilar VásquezAún no hay calificaciones
- 14 Clase OT 2021 Implementacion y MonitoreoDocumento27 páginas14 Clase OT 2021 Implementacion y MonitoreoLiz Aguilar VásquezAún no hay calificaciones
- Flujo de Trabajo Agisoft Metashape Con Puntos de Control Terrestre - 10!08!21Documento45 páginasFlujo de Trabajo Agisoft Metashape Con Puntos de Control Terrestre - 10!08!21Liz Aguilar VásquezAún no hay calificaciones
- Edición gráfica final catastroDocumento31 páginasEdición gráfica final catastroLiz Aguilar Vásquez100% (1)
- CAP 3 TEXTO Cámaras y EscanerDocumento52 páginasCAP 3 TEXTO Cámaras y EscanerLiz Aguilar VásquezAún no hay calificaciones
- MODULO 2-Las Propiedades Del SueloDocumento31 páginasMODULO 2-Las Propiedades Del SueloLiz Aguilar VásquezAún no hay calificaciones
- Tarea Arcgis Basico M4Documento12 páginasTarea Arcgis Basico M4Liz Aguilar VásquezAún no hay calificaciones
- Control de Calidad de Información Catastral - 23 - 07 - 2021Documento61 páginasControl de Calidad de Información Catastral - 23 - 07 - 2021Liz Aguilar Vásquez100% (1)
- Edición Gráfica PreliminarDocumento29 páginasEdición Gráfica PreliminarLiz Aguilar Vásquez100% (1)
- MODULO 1-La Formación Del SueloDocumento25 páginasMODULO 1-La Formación Del SueloLiz Aguilar VásquezAún no hay calificaciones
- Talleres de PdiDocumento3 páginasTalleres de PdiLiz Aguilar VásquezAún no hay calificaciones
- Tarea Arcgis Basico M3Documento3 páginasTarea Arcgis Basico M3Liz Aguilar VásquezAún no hay calificaciones
- Tarea Arcgis Basico M2Documento10 páginasTarea Arcgis Basico M2Liz Aguilar VásquezAún no hay calificaciones
- Clima de PiuraDocumento3 páginasClima de PiuraLiz Aguilar VásquezAún no hay calificaciones
- Tarea Arcgis Basico M5Documento5 páginasTarea Arcgis Basico M5Liz Aguilar VásquezAún no hay calificaciones
- Construcción de Triángulos y CuadriláterosDocumento7 páginasConstrucción de Triángulos y CuadriláterosAnonymous c2KoviKmAún no hay calificaciones
- Examen de Trigonometria Seleccion 5ta UnidadDocumento2 páginasExamen de Trigonometria Seleccion 5ta UnidadVictor Martinez LagunaAún no hay calificaciones
- Ud10 PDFDocumento9 páginasUd10 PDFmacarena72Aún no hay calificaciones
- Tarea Matematica AlvaroDocumento14 páginasTarea Matematica AlvaroRenato TorresAún no hay calificaciones
- Angulos en Posicion Normal-4ºDocumento6 páginasAngulos en Posicion Normal-4ºIngrid Paredes0% (1)
- Boletin Uni Semana 9 Geometria PDFDocumento2 páginasBoletin Uni Semana 9 Geometria PDFManowar JcAún no hay calificaciones
- Sesión 02: AUTOCAD 3D - 2017Documento8 páginasSesión 02: AUTOCAD 3D - 2017Jared David Guevara Castillo100% (1)
- Área figuras planas solucionesDocumento17 páginasÁrea figuras planas solucionesDeiry Vega0% (1)
- Tarea I-5Documento2 páginasTarea I-5Héctor MonroyAún no hay calificaciones
- Geometría 27Documento2 páginasGeometría 27Cj JuniorAún no hay calificaciones
- PC1_LEVANTAMIENTO CON CINTA JALÓN Y BRÚJULA - CAMPO Y GABINETEDocumento20 páginasPC1_LEVANTAMIENTO CON CINTA JALÓN Y BRÚJULA - CAMPO Y GABINETECristhofer Campojó BecerraAún no hay calificaciones
- Laboratorio 2Documento9 páginasLaboratorio 2UNO VIAJANDOAún no hay calificaciones
- Trabajo Grupal 02Documento5 páginasTrabajo Grupal 02Diego HMAún no hay calificaciones
- Calcula perímetro, área y banderas para decoración patrióticaDocumento4 páginasCalcula perímetro, área y banderas para decoración patrióticarmarcelatsAún no hay calificaciones
- Taller 10° AngulosDocumento5 páginasTaller 10° Angulosmilena100% (1)
- Clase 30 Cuadriláteros Inscriptibles y CircunscriptiblesDocumento8 páginasClase 30 Cuadriláteros Inscriptibles y CircunscriptiblesLos3 Pullipop TrollsAún no hay calificaciones
- C - SMS - C - Trigo - Área de Sector CircularDocumento4 páginasC - SMS - C - Trigo - Área de Sector CircularAlisson Gálvez ArévaloAún no hay calificaciones
- 7 - 9no - Propiedades de Los TriangulosDocumento11 páginas7 - 9no - Propiedades de Los TriangulosGonzalo OñateAún no hay calificaciones
- Expresiones algebraicas para afirmaciones matemáticasDocumento6 páginasExpresiones algebraicas para afirmaciones matemáticasmileny velascoAún no hay calificaciones
- Superficies Cuadricas FinalDocumento27 páginasSuperficies Cuadricas FinalLuis LopezAún no hay calificaciones
- Cicloides - FerrarioDocumento42 páginasCicloides - FerrarioWilmer Huertas100% (1)
- Taller de FuncionesDocumento14 páginasTaller de FuncionesY'anilys H'ernandezAún no hay calificaciones
- Hiperbola V2Documento3 páginasHiperbola V2Maritza Lozano AzañeroAún no hay calificaciones
- Guia # 3-1grado 11Documento7 páginasGuia # 3-1grado 11Liceo San BernardoAún no hay calificaciones
- TALLER DE TRIGONOMETRIA 10degDocumento2 páginasTALLER DE TRIGONOMETRIA 10deggerman jesus carmona puertaAún no hay calificaciones
- PC2 Topografìa A1 MELISSADocumento2 páginasPC2 Topografìa A1 MELISSALuizitho Flores GomezAún no hay calificaciones
- Trigonometría básicaDocumento5 páginasTrigonometría básicaRoger Fiel Vega ToscanoAún no hay calificaciones
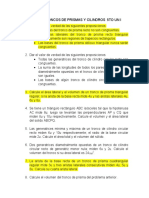
- G-5uni-Troncos de Pri-CilDocumento3 páginasG-5uni-Troncos de Pri-CilArroz TapadoAún no hay calificaciones
- Calculo Integral AaaDocumento6 páginasCalculo Integral AaaJenniffer DiazAún no hay calificaciones