También podría gustarte
- Razonamiento MatemáticoDocumento52 páginasRazonamiento MatemáticoRobin Alva100% (8)
- Prueba Diagnostica de Algebra - Lineal-7ma - Ed-Grossman-18-19Documento2 páginasPrueba Diagnostica de Algebra - Lineal-7ma - Ed-Grossman-18-19Carlos Alberto Montoya Correa50% (2)
- Semana 6extremosDocumento15 páginasSemana 6extremosUziel HanccoAún no hay calificaciones
- GEOmetria 1pdfDocumento928 páginasGEOmetria 1pdfSergio SolazAún no hay calificaciones
- Derivadas de funciones algebraicasDocumento27 páginasDerivadas de funciones algebraicasJoaquin Alcantara De la TorreAún no hay calificaciones
- Teoría de cuerpos y teoría de GaloisDe EverandTeoría de cuerpos y teoría de GaloisCalificación: 5 de 5 estrellas5/5 (1)
- 1°-Texto Del Estudiante 1°m - MatematicaDocumento244 páginas1°-Texto Del Estudiante 1°m - MatematicaYolanda Belmar OrdenesAún no hay calificaciones
- Capitulo 4 Aproximación Funcional e InterpolaciónDocumento21 páginasCapitulo 4 Aproximación Funcional e InterpolaciónIvan Flores AlmarazAún no hay calificaciones
- Resumen de DerivadaDocumento2 páginasResumen de DerivadaCarlos MartinezAún no hay calificaciones
- La DerivadaDocumento6 páginasLa DerivadaSergio Adrian SaavedraAún no hay calificaciones
- Clase 12Documento6 páginasClase 12Hallowdark Revolution14Aún no hay calificaciones
- Unidad V Derivación NumericaDocumento18 páginasUnidad V Derivación NumericaJhonny ChaconAún no hay calificaciones
- Splines (1) - Integración (2007)Documento35 páginasSplines (1) - Integración (2007)Fabian SchumacherAún no hay calificaciones
- mm412 Derivacion NumericaDocumento22 páginasmm412 Derivacion NumericaDaniel ValdezAún no hay calificaciones
- Reglas de SimpsonDocumento50 páginasReglas de SimpsonJose ChuchulloAún no hay calificaciones
- Guia10 DerivadaDocumento11 páginasGuia10 DerivadaFERNANDO DEMETRIOAún no hay calificaciones
- DerivadasDocumento4 páginasDerivadasLaignelet NicolleAún no hay calificaciones
- S13.s1 - LA DERIVADA - REGLAS DE DERIVACION PDFDocumento6 páginasS13.s1 - LA DERIVADA - REGLAS DE DERIVACION PDFChristian PalominoAún no hay calificaciones
- Capitulo 5 Integracion NumericaDocumento16 páginasCapitulo 5 Integracion NumericaJhenny JimenezAún no hay calificaciones
- InterpolacionDocumento13 páginasInterpolacionRafa TedescoAún no hay calificaciones
- IntegracionDocumento8 páginasIntegracionFernanda HernandezAún no hay calificaciones
- Resumen DerivadasDocumento4 páginasResumen DerivadasCarolay Bejarano100% (1)
- DERIVADASDocumento21 páginasDERIVADASEdith AlvarezAún no hay calificaciones
- ClaseDerivadasDocumento22 páginasClaseDerivadasFrancisco Abarzúa VallejosAún no hay calificaciones
- La Derivada - Reglas de DerivacionDocumento6 páginasLa Derivada - Reglas de DerivacionPATRICK ELBER SANKA QUITOAún no hay calificaciones
- Derivadas de funciones compuestas y regla de la cadenaDocumento23 páginasDerivadas de funciones compuestas y regla de la cadenaDiego Bravo GrausAún no hay calificaciones
- 2do Parcial Analisis Matematico 1Documento2 páginas2do Parcial Analisis Matematico 1camy.mesa66Aún no hay calificaciones
- Guia Regla de Los TrapeciosDocumento4 páginasGuia Regla de Los TrapeciosLeon ScottAún no hay calificaciones
- Apuntes Distribución de Probabilidad ContinuaDocumento3 páginasApuntes Distribución de Probabilidad ContinuajorgeAún no hay calificaciones
- DERIVADASDocumento12 páginasDERIVADASDiegoGLzAún no hay calificaciones
- Interpolación polinómicaDocumento65 páginasInterpolación polinómicaRicardo MondragonAún no hay calificaciones
- Diferenciación NuméricaDocumento4 páginasDiferenciación Numéricaeduardo huachoAún no hay calificaciones
- InterpolacionDocumento5 páginasInterpolacionAndres GranadosAún no hay calificaciones
- Poli No Mio Slag RangeDocumento13 páginasPoli No Mio Slag RangeRamón Antonio Zelaya MolinaAún no hay calificaciones
- Analisis Estructural Taller ErrorDocumento15 páginasAnalisis Estructural Taller ErrorJose Ignacio Peña AlarconAún no hay calificaciones
- Métodos NuméricosDocumento77 páginasMétodos NuméricosGrover SulcaAún no hay calificaciones
- Semana 4 DerivadasDocumento25 páginasSemana 4 DerivadasYuri ChoquehuancaAún no hay calificaciones
- Sesion DerivadaDocumento9 páginasSesion DerivadaJUAN ISAI CESPEDES MEJIAAún no hay calificaciones
- Catedra Metodos Numericos 2021 - UNSCHDocumento78 páginasCatedra Metodos Numericos 2021 - UNSCHJhan Carlos Vargas PillihuamanAún no hay calificaciones
- DerivadasDocumento12 páginasDerivadasClaudia BarcoAún no hay calificaciones
- Tarea 4 Fernando Andres AcostaDocumento8 páginasTarea 4 Fernando Andres AcostaAndres AcostaAún no hay calificaciones
- Unidad 06 - Diferenciacion e Integracion NumericasDocumento82 páginasUnidad 06 - Diferenciacion e Integracion NumericasFrank211Aún no hay calificaciones
- Derivaciòn Logaritmica y Fun. InvDocumento3 páginasDerivaciòn Logaritmica y Fun. InvMilagros Vanessa SaldarriagaAún no hay calificaciones
- Clase 12 Integracion NumericaDocumento12 páginasClase 12 Integracion Numericachtulu masterAún no hay calificaciones
- Guia10 DerivadaDocumento11 páginasGuia10 Derivadajprada163191Aún no hay calificaciones
- Unidad 4-1 Derivación e Integración NuméricaDocumento9 páginasUnidad 4-1 Derivación e Integración NuméricaMATIAS SAAVEDRA LUCOAún no hay calificaciones
- Método de Runge Kutta. Ecuaciones Diferenciales - Solución NuméricaDocumento10 páginasMétodo de Runge Kutta. Ecuaciones Diferenciales - Solución NuméricaCris AcevedoAún no hay calificaciones
- Integrales Indefindas y Definidas PDFDocumento43 páginasIntegrales Indefindas y Definidas PDFLenin Eli Flores BalandraAún no hay calificaciones
- Fórmulas y reglas de derivaciónDocumento10 páginasFórmulas y reglas de derivaciónSamuel CoradoAún no hay calificaciones
- Burden10 Capitulo4 Calculo PDFDocumento53 páginasBurden10 Capitulo4 Calculo PDFdanielAún no hay calificaciones
- Turno 1 - Tema 1 Con CheckDocumento2 páginasTurno 1 - Tema 1 Con CheckJenny PauriAún no hay calificaciones
- Sesión Semana 13 TrascendentalesDocumento8 páginasSesión Semana 13 TrascendentalescesarAún no hay calificaciones
- Propiedades de Las DerivadasDocumento5 páginasPropiedades de Las DerivadasPedro Aguilar RivasAún no hay calificaciones
- Trabajo de MatematicaDocumento26 páginasTrabajo de MatematicaALEXDAún no hay calificaciones
- Segundo Examen Parcial - SoluciónDocumento5 páginasSegundo Examen Parcial - SoluciónJosé SCAún no hay calificaciones
- La Derivada de Una FunciónDocumento20 páginasLa Derivada de Una FunciónBecky ChavezAún no hay calificaciones
- Turno 1 - Tema 2 Con CheckDocumento2 páginasTurno 1 - Tema 2 Con CheckJenny PauriAún no hay calificaciones
- S1 Diapositiva La DerivadaDocumento24 páginasS1 Diapositiva La DerivadaCristian Rodriguez ChupAún no hay calificaciones
- Sesión 14Documento16 páginasSesión 14Alberth Aquino HuatucoAún no hay calificaciones
- Simpson 1-3Documento17 páginasSimpson 1-3carlos465Aún no hay calificaciones
- Derivadas y su aplicaciónDocumento60 páginasDerivadas y su aplicaciónJose Manuel Godoy EscribarAún no hay calificaciones
- Derivadas y sus aplicaciones en funciones económicasDocumento12 páginasDerivadas y sus aplicaciones en funciones económicasmanuelAún no hay calificaciones
- La Derivada. Reglas de DerivaciónDocumento32 páginasLa Derivada. Reglas de Derivaciónjuan castaeda0% (1)
- Guia de Ejercicios M3 PDFDocumento25 páginasGuia de Ejercicios M3 PDFsofyvega89Aún no hay calificaciones
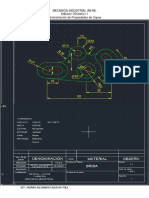
- PRACTICO Administración de Propiedades de CapasDocumento3 páginasPRACTICO Administración de Propiedades de CapasAlejandro CallisayaAún no hay calificaciones
- Practico 6 Vistas p4Documento1 páginaPractico 6 Vistas p4Alejandro CallisayaAún no hay calificaciones
- Practico 1Documento2 páginasPractico 1Alejandro CallisayaAún no hay calificaciones
- Practico 6 Vistas p6Documento1 páginaPractico 6 Vistas p6Alejandro CallisayaAún no hay calificaciones
- Practico 6 Vistas p5Documento1 páginaPractico 6 Vistas p5Alejandro CallisayaAún no hay calificaciones
- Practico 6 Vistas p2Documento1 páginaPractico 6 Vistas p2Alejandro CallisayaAún no hay calificaciones
- Practico 6 Vistas p1Documento1 páginaPractico 6 Vistas p1Alejandro CallisayaAún no hay calificaciones
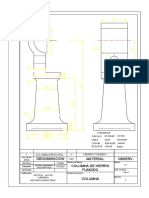
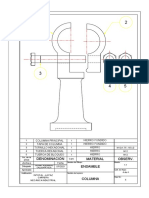
- P.f.columna Hoja1Documento1 páginaP.f.columna Hoja1Alejandro CallisayaAún no hay calificaciones
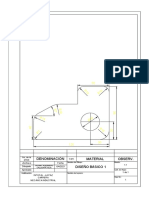
- DISEÑO BASICO 1-ModelDocumento1 páginaDISEÑO BASICO 1-ModelAlejandro CallisayaAún no hay calificaciones
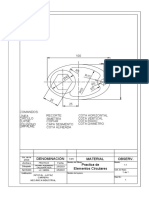
- Elementos CircularesDocumento1 páginaElementos CircularesAlejandro CallisayaAún no hay calificaciones
- Capitulo 5 Integracion NumericaDocumento16 páginasCapitulo 5 Integracion NumericaJhenny JimenezAún no hay calificaciones
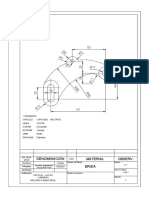
- DISEÑO BRIDA-ModelDocumento1 páginaDISEÑO BRIDA-ModelAlejandro CallisayaAún no hay calificaciones
- P.f.columna Hoja4Documento1 páginaP.f.columna Hoja4Alejandro CallisayaAún no hay calificaciones
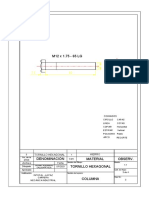
- P.f.columna Hoja3Documento1 páginaP.f.columna Hoja3Alejandro CallisayaAún no hay calificaciones
- Ecuación de Balance de MateriaDocumento15 páginasEcuación de Balance de MateriaAlejandro CallisayaAún no hay calificaciones
- Examen Final Dibujo TecnicoDocumento1 páginaExamen Final Dibujo TecnicoAlejandro CallisayaAún no hay calificaciones
- Ingenieria de ReservoriosDocumento26 páginasIngenieria de ReservoriosRodrigo Goyzueta FloresAún no hay calificaciones
- Capitulo 6 PDFDocumento15 páginasCapitulo 6 PDFJavier MillerAún no hay calificaciones
- Capítulo 5 Propiedades y Teoria de Los GasesDocumento34 páginasCapítulo 5 Propiedades y Teoria de Los GasesAlejandro CallisayaAún no hay calificaciones
- La Ley de DarcyDocumento14 páginasLa Ley de DarcyAlejandro CallisayaAún no hay calificaciones
- Balance de materia en yacimientos de gasDocumento7 páginasBalance de materia en yacimientos de gasAlejandro CallisayaAún no hay calificaciones
- Capitulo 5 Integracion NumericaDocumento16 páginasCapitulo 5 Integracion NumericaJhenny JimenezAún no hay calificaciones
- Capitulo 6 Diferenciacion NumericaDocumento8 páginasCapitulo 6 Diferenciacion NumericaAlejandro CallisayaAún no hay calificaciones
- Capitulo 9 Aplicaciones VariasDocumento24 páginasCapitulo 9 Aplicaciones VariasToño ToñoAún no hay calificaciones
- Aplicaciones - A - Ingenieria - de ReservoriosDocumento58 páginasAplicaciones - A - Ingenieria - de ReservoriosMiguel Tenia MarcanoAún no hay calificaciones
- Capitulo 3 Sistemas de EcuacionesDocumento32 páginasCapitulo 3 Sistemas de EcuacionesAlejandro CallisayaAún no hay calificaciones
- Capítulo 2 Clasificación de Reservorios y FluidosDocumento20 páginasCapítulo 2 Clasificación de Reservorios y FluidosRodrigo Goyzueta FloresAún no hay calificaciones
- Aplicaciones A ProduccionDocumento14 páginasAplicaciones A ProduccionMiguel MartinezAún no hay calificaciones
- Diagnostico de Matemáticas Primer GradoDocumento8 páginasDiagnostico de Matemáticas Primer GradoDany SosaAún no hay calificaciones
- Mapa Conceptual - Plantilla en WordDocumento10 páginasMapa Conceptual - Plantilla en WordCRISTIAN GUADALUPE VASQUEZ CHIGOAún no hay calificaciones
- Clase14 Integracion Por Fracciones Parciales Simples Caso 1 Y2Documento10 páginasClase14 Integracion Por Fracciones Parciales Simples Caso 1 Y2CristianCharrisAún no hay calificaciones
- Informe Mod II Flores-LoretoDocumento12 páginasInforme Mod II Flores-Loretoyadira floresAún no hay calificaciones
- Bisectriz de Un TriánguloDocumento3 páginasBisectriz de Un TriánguloWILLIAM CABIESESAún no hay calificaciones
- Prácticos Cálculo Ii Primer Parcial (I 2017)Documento4 páginasPrácticos Cálculo Ii Primer Parcial (I 2017)Jairo Camacho BriceñoAún no hay calificaciones
- Cuando X Se Encuentra RestandoDocumento10 páginasCuando X Se Encuentra RestandoMarianny CedeñoAún no hay calificaciones
- Teoria Funcion LinealDocumento3 páginasTeoria Funcion LinealPaula CharityAún no hay calificaciones
- Geometría. Jesús García de Jalón de La Fuente IES Ramiro de Maeztu MadridDocumento47 páginasGeometría. Jesús García de Jalón de La Fuente IES Ramiro de Maeztu MadridPao PazAún no hay calificaciones
- 01 Racionales 3ADocumento36 páginas01 Racionales 3ATaylorAún no hay calificaciones
- Números Decimales - Diccionario de Matemáticas - SuperprofDocumento11 páginasNúmeros Decimales - Diccionario de Matemáticas - SuperprofCloverAún no hay calificaciones
- Primitivas (Integración Por Partes) - FCFMDocumento5 páginasPrimitivas (Integración Por Partes) - FCFMarturocalmaster100% (5)
- Práctica - Geometría AnalíticaDocumento4 páginasPráctica - Geometría AnalíticaLucy CopaAún no hay calificaciones
- Matemática 3 CENS 2021Documento3 páginasMatemática 3 CENS 2021Sergio David PirizAún no hay calificaciones
- Introduccion Al Calculo Tarea 3Documento3 páginasIntroduccion Al Calculo Tarea 3alfredo martinezAún no hay calificaciones
- Foro 1. Matemáticas Aplicadas A Los Negocios.Documento3 páginasForo 1. Matemáticas Aplicadas A Los Negocios.EstefaniaAún no hay calificaciones
- Identidades TrigonometricasDocumento10 páginasIdentidades Trigonometricasjosealbet100% (1)
- Alge 02Documento6 páginasAlge 02Yois Isayol Armas PalominoAún no hay calificaciones
- GEOMETRIADocumento130 páginasGEOMETRIAferramosnando66Aún no hay calificaciones
- Cateto en TerapiaDocumento5 páginasCateto en TerapiaRODRIGO VIZCAINO MONTANOAún no hay calificaciones
- Derivadas ParcialesDocumento4 páginasDerivadas ParcialesDiego RamosAún no hay calificaciones
- Guía 1 Matemáticas 11°Documento4 páginasGuía 1 Matemáticas 11°nariño andres gomez pachecoAún no hay calificaciones
- Integrales trigonométricas y completando trinomiosDocumento7 páginasIntegrales trigonométricas y completando trinomiosJose Antonio Jimenez GalvanAún no hay calificaciones
- Atencion Ejercicios ResueltosDocumento3 páginasAtencion Ejercicios ResueltosValeria BarriosAún no hay calificaciones
- Semana 09 Ecuaciones Lineales Con 2 VariablesDocumento15 páginasSemana 09 Ecuaciones Lineales Con 2 VariablesKevin Jair Montenegro Purihuaman 4HAún no hay calificaciones