También podría gustarte
- Trabajo Final - ProcesosDocumento15 páginasTrabajo Final - ProcesosGibson TrinidadAún no hay calificaciones
- Informe de Laboratorio N°12 - Métodos Numéricos PDFDocumento21 páginasInforme de Laboratorio N°12 - Métodos Numéricos PDFWilliams Alexander Choque OrmacheaAún no hay calificaciones
- Trabajo (3) Modelos de Regresion-CuadráticaDocumento22 páginasTrabajo (3) Modelos de Regresion-CuadráticaPedro EspinozaAún no hay calificaciones
- Metodo de Jacobi y Gauss-Seidel-2Documento17 páginasMetodo de Jacobi y Gauss-Seidel-2Bianka Reyes100% (1)
- Oabenpra - 1. Introducción A Los Métodos NuméricosDocumento7 páginasOabenpra - 1. Introducción A Los Métodos Numéricosdanielamartinezp17Aún no hay calificaciones
- Resumen de EconometríaDocumento5 páginasResumen de EconometríaEconomía DigitalAún no hay calificaciones
- Normalidad MultivarianteDocumento21 páginasNormalidad MultivarianteErick BarreraAún no hay calificaciones
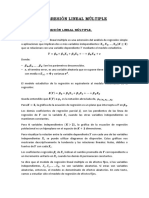
- Regresion Lineal MúltipleDocumento17 páginasRegresion Lineal MúltipleMILEYNIAún no hay calificaciones
- Me 5Documento26 páginasMe 5susana sepulvedaAún no hay calificaciones
- Sucesiones y Series 14-11-18Documento24 páginasSucesiones y Series 14-11-18Dayner Alfredo Amante TorresAún no hay calificaciones
- Ecuaciones en Derivadas ParcialesDocumento7 páginasEcuaciones en Derivadas ParcialesAnonymous YRSe1yRAún no hay calificaciones
- Analisis de AutocorrelacionDocumento35 páginasAnalisis de Autocorrelacionapi-373574983% (6)
- Notas de Clase 3 - Modelos de Variables Aleatorias DiscretasDocumento12 páginasNotas de Clase 3 - Modelos de Variables Aleatorias DiscretasFlor AraujoAún no hay calificaciones
- Ec. de Primer Grado Primer Orden-1-1Documento8 páginasEc. de Primer Grado Primer Orden-1-1Jhon Kevin Canaviri MamaniAún no hay calificaciones
- ARIMADocumento8 páginasARIMARubénAún no hay calificaciones
- Mínimos Cuadrados PDFDocumento6 páginasMínimos Cuadrados PDFm&m&v&bAún no hay calificaciones
- de Clase Semana 13Documento29 páginasde Clase Semana 13Jose Luis Talaverano NajarroAún no hay calificaciones
- Simulación Teorema Central Del LímiteDocumento14 páginasSimulación Teorema Central Del LímiteLeidy CruzAún no hay calificaciones
- s13 PPT Valores Propios 2020 2Documento24 páginass13 PPT Valores Propios 2020 2Katia Ibarra AliagaAún no hay calificaciones
- 04) Parcial 1 - Variables AleatoriasDocumento18 páginas04) Parcial 1 - Variables AleatoriasWolfgang ResendizAún no hay calificaciones
- Laboratorio N°5Documento14 páginasLaboratorio N°5juan julcaAún no hay calificaciones
- Derivadas-Parciales. InformeDocumento32 páginasDerivadas-Parciales. InformerohitAún no hay calificaciones
- SOVOLEVDocumento137 páginasSOVOLEVRolly Steven Cadillo PomaAún no hay calificaciones
- Metodo de JacobiDocumento7 páginasMetodo de JacobiJesus Alberto Jaramillo FloresAún no hay calificaciones
- Guía 5 - Dinámica AplicadaDocumento3 páginasGuía 5 - Dinámica AplicadaRolexAún no hay calificaciones
- Criterios de ConvergenciaDocumento10 páginasCriterios de ConvergenciaJose OlveraAún no hay calificaciones
- A. M. I - F.r.re. - Sucesiones Numéricas PDFDocumento6 páginasA. M. I - F.r.re. - Sucesiones Numéricas PDFLucas Gauna LesteymeAún no hay calificaciones
- Ecuaciones Diferenciales de Primer OrdenDocumento13 páginasEcuaciones Diferenciales de Primer OrdenarnoldAún no hay calificaciones
- Regresión Lineal MultipleDocumento6 páginasRegresión Lineal MultipleRashel VaraAún no hay calificaciones
- Autovalores y Autovectores PDFDocumento37 páginasAutovalores y Autovectores PDFRoda RodaAún no hay calificaciones
- R-Comprobación de Adecuacion Del ModeloDocumento15 páginasR-Comprobación de Adecuacion Del ModeloYHUREMA DEL CARMEN GELDRES TORRESAún no hay calificaciones
- Universidad Nacional de Ucayali - Semana 3-4Documento19 páginasUniversidad Nacional de Ucayali - Semana 3-4Camila Victoria Rios MoisesAún no hay calificaciones
- Matematica Sucesiones y SeriesDocumento9 páginasMatematica Sucesiones y Seriesjesus david casique rodriguezAún no hay calificaciones
- Mvco2 U3 A1 JeruDocumento3 páginasMvco2 U3 A1 JeruJesús ÚrzuloAún no hay calificaciones
- Primer Reporte FESCDocumento10 páginasPrimer Reporte FESCjuan islasAún no hay calificaciones
- de Clase Semana 13Documento29 páginasde Clase Semana 13ROCAYAún no hay calificaciones
- EconometriaDocumento40 páginasEconometriaOG AIAún no hay calificaciones
- Trabajo de Sucesiones y Series InfinitasDocumento16 páginasTrabajo de Sucesiones y Series InfinitasSaulo Villegas SilvaAún no hay calificaciones
- Resumen Calculo de Varias VariablesDocumento8 páginasResumen Calculo de Varias VariablesMaria Fernanda Zambrano GarciaAún no hay calificaciones
- Tema 3 Variables Aleatorias-Problemas PDFDocumento15 páginasTema 3 Variables Aleatorias-Problemas PDFpedro ramirez sanxAún no hay calificaciones
- Ecuaciones de Johnson-Mehl y ArrheniusDocumento5 páginasEcuaciones de Johnson-Mehl y ArrheniusSebastian CedilloAún no hay calificaciones
- 6 - Teoria DefinitivoDocumento17 páginas6 - Teoria DefinitivoBeggy LoriteAún no hay calificaciones
- Sucesiones Numéricas EjerciciosDocumento27 páginasSucesiones Numéricas EjerciciosJavier Alejandro Castruita LechugaAún no hay calificaciones
- Módulo II-321Documento44 páginasMódulo II-321Retro BotAún no hay calificaciones
- Números RealesDocumento37 páginasNúmeros RealesMaria Fernanda Laynes SudarioAún no hay calificaciones
- Investigacion Regla de CramerDocumento13 páginasInvestigacion Regla de CramerJared FuentesAún no hay calificaciones
- Funciones de Transferencia Issa Barake SlebiDocumento7 páginasFunciones de Transferencia Issa Barake Slebiissa barakeAún no hay calificaciones
- Inferencia Estadística en El Modelo de Dos VariablesDocumento21 páginasInferencia Estadística en El Modelo de Dos VariablesKevo Pérez GarcíaAún no hay calificaciones
- Clase 3 - Función Racional Básica (Con Aplicación)Documento16 páginasClase 3 - Función Racional Básica (Con Aplicación)Brad Mero'sAún no hay calificaciones
- Teorias Economica ExteriorDocumento1 páginaTeorias Economica ExteriorLuisJesusLuJeAún no hay calificaciones
- 5Es una ecuación de comportamiento. 𝑌 = 𝐶 + 𝐼 + 𝐺 + 𝑋𝑁.: I=I (i) Donde: i=r +πDocumento1 página5Es una ecuación de comportamiento. 𝑌 = 𝐶 + 𝐼 + 𝐺 + 𝑋𝑁.: I=I (i) Donde: i=r +πLuisJesusLuJeAún no hay calificaciones
- 1.-Cuáles Son Las Características de La Entrevista?Documento2 páginas1.-Cuáles Son Las Características de La Entrevista?LuisJesusLuJeAún no hay calificaciones
- 1Documento1 página1LuisJesusLuJeAún no hay calificaciones
- 3Documento2 páginas3LuisJesusLuJeAún no hay calificaciones
- En CuestaDocumento1 páginaEn CuestaLuisJesusLuJeAún no hay calificaciones
- TEORIA DEl DESARROLLO Y LOCALIZACIÓNDocumento14 páginasTEORIA DEl DESARROLLO Y LOCALIZACIÓNLuisJesusLuJeAún no hay calificaciones
- En CuestaDocumento1 páginaEn CuestaLuisJesusLuJeAún no hay calificaciones
- 1Documento1 página1LuisJesusLuJeAún no hay calificaciones
- 1.-Cuáles Son Las Características de La Entrevista?Documento2 páginas1.-Cuáles Son Las Características de La Entrevista?LuisJesusLuJeAún no hay calificaciones
- 3Documento2 páginas3LuisJesusLuJeAún no hay calificaciones
- Auto Corre Laci OnDocumento32 páginasAuto Corre Laci OnLuisJesusLuJeAún no hay calificaciones
- 5Es una ecuación de comportamiento. 𝑌 = 𝐶 + 𝐼 + 𝐺 + 𝑋𝑁.: I=I (i) Donde: i=r +πDocumento1 página5Es una ecuación de comportamiento. 𝑌 = 𝐶 + 𝐼 + 𝐺 + 𝑋𝑁.: I=I (i) Donde: i=r +πLuisJesusLuJeAún no hay calificaciones
- Heteros Ceda Stic I DadDocumento37 páginasHeteros Ceda Stic I DadLuisJesusLuJeAún no hay calificaciones
- MulticolinealidadDocumento51 páginasMulticolinealidadLuisJesusLuJeAún no hay calificaciones
- Heteros Ceda Stic I DadDocumento37 páginasHeteros Ceda Stic I DadLuisJesusLuJeAún no hay calificaciones
- Resumen de Teoria OrgDocumento5 páginasResumen de Teoria OrgLuisJesusLuJeAún no hay calificaciones
- Tema 10Documento14 páginasTema 10LuisJesusLuJeAún no hay calificaciones
- Construcción de La Infraestructura e Implementación Del Servicio Educativo de Nivel Inicial de La I.E Nro. 1373 Botone en El Centro Poblado de Umuto.Documento5 páginasConstrucción de La Infraestructura e Implementación Del Servicio Educativo de Nivel Inicial de La I.E Nro. 1373 Botone en El Centro Poblado de Umuto.LuisJesusLuJeAún no hay calificaciones
- Elaboración Del Plan de Implementación Del ProyectoDocumento21 páginasElaboración Del Plan de Implementación Del ProyectoLuisJesusLuJeAún no hay calificaciones
- Instrucciones Practica EconometríaDocumento2 páginasInstrucciones Practica EconometríaLuisJesusLuJeAún no hay calificaciones
- Mejoramiento de La Producción de Artesanías en Base A Cuero en La Asociación Munay Llankay Artesanos.Documento5 páginasMejoramiento de La Producción de Artesanías en Base A Cuero en La Asociación Munay Llankay Artesanos.LuisJesusLuJeAún no hay calificaciones
- HeterocedasticidadDocumento19 páginasHeterocedasticidadJudith Gajardo RíosAún no hay calificaciones
- Actividad4 UnidadIII EconometriaB MamaniCabreraLuisJesusDocumento1 páginaActividad4 UnidadIII EconometriaB MamaniCabreraLuisJesusLuisJesusLuJeAún no hay calificaciones
- MulticolinealidadDocumento51 páginasMulticolinealidadLuisJesusLuJeAún no hay calificaciones
- ActividadII ECONOMETRIA 3ERAUNIDAD LuisjesusmamanicabreraDocumento2 páginasActividadII ECONOMETRIA 3ERAUNIDAD LuisjesusmamanicabreraLuisJesusLuJeAún no hay calificaciones
- Los Metodos de Investigacion PDFDocumento16 páginasLos Metodos de Investigacion PDFLuisJesusLuJeAún no hay calificaciones
- Antecedentes InternacionalesDocumento5 páginasAntecedentes InternacionalesLuisJesusLuJeAún no hay calificaciones
- Raíz Unitaria Estacionariedad y Modelos ArimaDocumento44 páginasRaíz Unitaria Estacionariedad y Modelos ArimaSofía CarranzaAún no hay calificaciones
- Proceso SDocumento12 páginasProceso SJorge JmmsAún no hay calificaciones
- Monografia Pronosticos LaiveDocumento49 páginasMonografia Pronosticos LaiveJuan Carlos Maquera QuispeAún no hay calificaciones
- Procesos Estacionarios ARMADocumento86 páginasProcesos Estacionarios ARMAJhoan AldanaAún no hay calificaciones
- Sesión09 PDFDocumento42 páginasSesión09 PDFCarlos LopezAún no hay calificaciones
- Modelos Arma - Eric LahuraDocumento49 páginasModelos Arma - Eric LahuraKevin Alvarez GarciaAún no hay calificaciones
- Cap11 Javier GalanDocumento27 páginasCap11 Javier GalanjulioAún no hay calificaciones
- WignerDocumento8 páginasWignerIrann MelchorAún no hay calificaciones
- 20180423110425Documento99 páginas20180423110425Marlon Guevara Saavedra0% (1)
- Capitulo 10 de Wooldridge Econometria FilminaDocumento8 páginasCapitulo 10 de Wooldridge Econometria FilminaGreminger MaximilianoAún no hay calificaciones
- Precios HedónicosDocumento46 páginasPrecios HedónicosJonas JonasitoAún no hay calificaciones
- Manual SihimaxDocumento75 páginasManual SihimaxFidelmar MerlosAún no hay calificaciones
- Capitulo IVDocumento18 páginasCapitulo IVsteve edwinAún no hay calificaciones
- Fas FapDocumento1 páginaFas FapSujhey Chambi MamaniAún no hay calificaciones
- SeñalesDocumento8 páginasSeñalesDiana Carolina Martinez CastilloAún no hay calificaciones
- Estimación y Reducción de Errores Con Correlaciones CruzadasDocumento19 páginasEstimación y Reducción de Errores Con Correlaciones CruzadasVictor HugoAún no hay calificaciones
- Capitulo 3 Stat FitDocumento15 páginasCapitulo 3 Stat FitPedro QuiñonesAún no hay calificaciones
- Modelos Estadisticos de Series de TiempomodDocumento30 páginasModelos Estadisticos de Series de TiempomodcesarAún no hay calificaciones
- Laboratorio 3 CorrelaciónDocumento10 páginasLaboratorio 3 CorrelaciónkarlaAún no hay calificaciones
- Analisis de Las Series de Tiempo en ExcelDocumento33 páginasAnalisis de Las Series de Tiempo en ExcelDysan ChuraAún no hay calificaciones
- El Pronóstico Se Divide en Cuatro Tipos BásicosDocumento5 páginasEl Pronóstico Se Divide en Cuatro Tipos BásicosericortizredessocialesAún no hay calificaciones
- AUTOCORRELACIÓN - MEDIAS MÓVILES MA (Q)Documento25 páginasAUTOCORRELACIÓN - MEDIAS MÓVILES MA (Q)José Daniel Colque HuereAún no hay calificaciones
- Filtro WienerDocumento6 páginasFiltro WienerBrayhan Huaman BerruAún no hay calificaciones
- DSP 1Documento3 páginasDSP 1Adriana MilenaAún no hay calificaciones
- Arima SarimaDocumento7 páginasArima SarimaJairo Alexander Correa AsencioAún no hay calificaciones
- Plan Agregado de Una Empresa Textil. Caso de Estudio de Imbabura, EcuadorDocumento16 páginasPlan Agregado de Una Empresa Textil. Caso de Estudio de Imbabura, EcuadorFBAAún no hay calificaciones
- EconometriaDocumento28 páginasEconometriaIgnacio QuintanaAún no hay calificaciones
- Gua para El Segundo ParcialDocumento8 páginasGua para El Segundo ParcialJuan perezAún no hay calificaciones
- ECONOMETRIA Final ProyectoDocumento19 páginasECONOMETRIA Final ProyectoAlejandro VargasAún no hay calificaciones
- Métodos Estadísticos para La Investigación (Página 3)Documento30 páginasMétodos Estadísticos para La Investigación (Página 3)Leonidas Zapata OlivaresAún no hay calificaciones
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Introducción a la Estadística BayesianaDe EverandIntroducción a la Estadística BayesianaCalificación: 5 de 5 estrellas5/5 (2)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Control de calidad. Un enfoque integral y estadísticoDe EverandControl de calidad. Un enfoque integral y estadísticoCalificación: 5 de 5 estrellas5/5 (8)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)