También podría gustarte
- 05 Deep Learning v2Documento80 páginas05 Deep Learning v2Scarllet Osuna TostadoAún no hay calificaciones
- Planificación de Trayectorias para El Control Autónomo de Un Cuadricóptero Utilizando Técnicas de Visión Artificial y Aprendizaje ProfundoDocumento134 páginasPlanificación de Trayectorias para El Control Autónomo de Un Cuadricóptero Utilizando Técnicas de Visión Artificial y Aprendizaje ProfundoScarllet Osuna TostadoAún no hay calificaciones
- Lsgonzález TFG Ic 2021Documento79 páginasLsgonzález TFG Ic 2021Scarllet Osuna TostadoAún no hay calificaciones
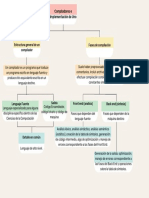
- Mapa Conceptual Sobre Compiladores e Implementación de UnoDocumento1 páginaMapa Conceptual Sobre Compiladores e Implementación de UnoScarllet Osuna TostadoAún no hay calificaciones
- Tarea 2Documento1 páginaTarea 2Scarllet Osuna TostadoAún no hay calificaciones
- T1 - Edo Actual MecatrónicaDocumento11 páginasT1 - Edo Actual MecatrónicaScarllet Osuna TostadoAún no hay calificaciones
- Mapa Conceptual Sobre Desarrollo de SistemasDocumento3 páginasMapa Conceptual Sobre Desarrollo de SistemasScarllet Osuna TostadoAún no hay calificaciones
- t1 - Actualización de RobotsDocumento6 páginast1 - Actualización de RobotsScarllet Osuna TostadoAún no hay calificaciones
- T2 - Lista de CotejoDocumento1 páginaT2 - Lista de CotejoScarllet Osuna TostadoAún no hay calificaciones
- Control DigitalDocumento17 páginasControl DigitalScarllet Osuna TostadoAún no hay calificaciones
- Tarea2 A U1 EspecificacionesDocumento1 páginaTarea2 A U1 EspecificacionesScarllet Osuna TostadoAún no hay calificaciones
- T3 - Desglose de ComponentesDocumento7 páginasT3 - Desglose de ComponentesScarllet Osuna TostadoAún no hay calificaciones
- Maqueta - Lista de CotejoDocumento1 páginaMaqueta - Lista de CotejoScarllet Osuna TostadoAún no hay calificaciones
- Maqueta de Un Manipulador RobóticoDocumento6 páginasMaqueta de Un Manipulador RobóticoScarllet Osuna TostadoAún no hay calificaciones
- T2 - Especificaciones de RobotsDocumento4 páginasT2 - Especificaciones de RobotsScarllet Osuna TostadoAún no hay calificaciones
- T2 - Especificaciones de RobotsDocumento4 páginasT2 - Especificaciones de RobotsScarllet Osuna TostadoAún no hay calificaciones
- Maqueta Manipulador RobóticoDocumento1 páginaMaqueta Manipulador RobóticoScarllet Osuna TostadoAún no hay calificaciones
- Carrito Seguidor de Linea NegraDocumento6 páginasCarrito Seguidor de Linea NegraGissel SamaAún no hay calificaciones
- Cuadro Comparativo Sobre LegoDocumento3 páginasCuadro Comparativo Sobre Legodiego florezAún no hay calificaciones
- Trabajo FinalDocumento23 páginasTrabajo FinalJORGE LUIS TZOC AGUILARAún no hay calificaciones
- Blade Runner 2049 y Sus PrediccionesDocumento4 páginasBlade Runner 2049 y Sus Prediccionesandres.garciaoAún no hay calificaciones
- Cómo Se Desarrolla El Pensamiento Científico y Tecnológico A Lo Largo de La Infancia - Capítulo 2 - Furman, M. AdapataciónDocumento5 páginasCómo Se Desarrolla El Pensamiento Científico y Tecnológico A Lo Largo de La Infancia - Capítulo 2 - Furman, M. AdapataciónLucía MochenAún no hay calificaciones
- Robotica Manipulador RRPDocumento11 páginasRobotica Manipulador RRPMiguel Antonio ZalazarAún no hay calificaciones
- Sistema Control 2Documento56 páginasSistema Control 2Princess SerenityAún no hay calificaciones
- Guia de Computacion - RobóticaDocumento3 páginasGuia de Computacion - RobóticaIgnacio ValentaAún no hay calificaciones
- Aplicaciones Basicas de La ComputadoraDocumento32 páginasAplicaciones Basicas de La ComputadoraJorge L Mendoza MendozaAún no hay calificaciones
- Batalla SimuladaDocumento2 páginasBatalla SimuladaRoberto SalazarAún no hay calificaciones
- Plc's y MicrocontroladoresDocumento6 páginasPlc's y Microcontroladoreswilliam0% (1)
- Ensayo Sobre La Importancia de La Mecatronica en La Industria PeruanaDocumento3 páginasEnsayo Sobre La Importancia de La Mecatronica en La Industria PeruanaDexter ThompsonAún no hay calificaciones
- ConclusionDocumento2 páginasConclusionCamila ReynosoAún no hay calificaciones
- Ensayo La Película Los InventoresDocumento3 páginasEnsayo La Película Los Inventorescoraima manrique osorno0% (2)
- Guia 2013-14 640 805G 20140916-132551 PDFDocumento4 páginasGuia 2013-14 640 805G 20140916-132551 PDFferlbAún no hay calificaciones
- Manual de Robotino FestoDocumento42 páginasManual de Robotino FestoManuel Mendez ArcosAún no hay calificaciones
- La Quinta Generación de Derechos Humanos Tampoco Será Estrictamente Extensible A Seres HumanosDocumento5 páginasLa Quinta Generación de Derechos Humanos Tampoco Será Estrictamente Extensible A Seres HumanosJahir MontealegreAún no hay calificaciones
- Mega Torneo de Robótica Runibot 2022Documento4 páginasMega Torneo de Robótica Runibot 2022andres ricardo laverde pedrazaAún no hay calificaciones
- Instrucciones Conga Excellence 990Documento16 páginasInstrucciones Conga Excellence 990Anonymous FWSe1Oh19% (16)
- Texto 50an Oschile China Al Futuro FinalDocumento80 páginasTexto 50an Oschile China Al Futuro FinalZenda Dulkkamara Quiquincha GonzalezAún no hay calificaciones
- Arquitectura Robots Sensores y ActuadoresDocumento27 páginasArquitectura Robots Sensores y Actuadoreswigido100% (1)
- Ensayo Sálvese Quien Pueda FaiberDocumento2 páginasEnsayo Sálvese Quien Pueda FaiberJHON FAIBER OCAMPO VARGAS100% (1)
- Diseño, Construcción y Control de Una Serpiente Robótica: Conference PaperDocumento16 páginasDiseño, Construcción y Control de Una Serpiente Robótica: Conference PaperAdriana Maldonado OsorioAún no hay calificaciones
- Diseño, Modelamiento y Simulación 3D de Un Robot Móvil para Exploración de Terrenos Nasly Carolina Pérez Pérez Diego Arturo Salamanca AvellanedaDocumento196 páginasDiseño, Modelamiento y Simulación 3D de Un Robot Móvil para Exploración de Terrenos Nasly Carolina Pérez Pérez Diego Arturo Salamanca AvellanedaEDWIN FERRER SUCASACA AMBROCIOAún no hay calificaciones
- Simulink Robot de 2 GradosDe Libertad, Robot de 3 Grados de Libertad Tipo ScaraDocumento11 páginasSimulink Robot de 2 GradosDe Libertad, Robot de 3 Grados de Libertad Tipo ScaraDavid Guadiana MartínezAún no hay calificaciones
- Taller RobotDocumento7 páginasTaller RobotKAREN LIZETH ORTIZ ROJASAún no hay calificaciones
- Modelo Fiee Unac Silabo Ld954Documento5 páginasModelo Fiee Unac Silabo Ld954Ronald VilcaAún no hay calificaciones
- Ia para TodosDocumento63 páginasIa para TodosLuis QuitoAún no hay calificaciones
- Tipos de Sistemas de Manufactura FlexibleDocumento41 páginasTipos de Sistemas de Manufactura FlexibleEDWIN ALEJANDRO RESENDIZ PEREZAún no hay calificaciones
- Grupo #4Documento23 páginasGrupo #4Hector MonteroAún no hay calificaciones
- Psicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaDe EverandPsicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaCalificación: 4.5 de 5 estrellas4.5/5 (766)
- Yo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)De EverandYo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Calificación: 5 de 5 estrellas5/5 (8)
- Recupera tu mente, reconquista tu vidaDe EverandRecupera tu mente, reconquista tu vidaCalificación: 5 de 5 estrellas5/5 (8)
- El poder del optimismo: Herramientas para vivir de forma más positivaDe EverandEl poder del optimismo: Herramientas para vivir de forma más positivaCalificación: 5 de 5 estrellas5/5 (16)
- Resetea tu mente. Descubre de lo que eres capazDe EverandResetea tu mente. Descubre de lo que eres capazCalificación: 5 de 5 estrellas5/5 (196)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanDe EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanCalificación: 4.5 de 5 estrellas4.5/5 (64)
- Ansiosos por nada: Menos preocupación, más pazDe EverandAnsiosos por nada: Menos preocupación, más pazCalificación: 4.5 de 5 estrellas4.5/5 (582)
- The Coaching Habit: Las 7 preguntas clave para liderar equipos y organizaciones del siglo XXIDe EverandThe Coaching Habit: Las 7 preguntas clave para liderar equipos y organizaciones del siglo XXICalificación: 4.5 de 5 estrellas4.5/5 (166)
- Una mente en calma: Técnicas para manejar los pensamientos intrusivosDe EverandUna mente en calma: Técnicas para manejar los pensamientos intrusivosCalificación: 4.5 de 5 estrellas4.5/5 (142)
- DMT: La molécula del espíritu (DMT: The Spirit Molecule): Las revolucionarias investigaciones de un medico sobre la biologia de las experiencias misticas y cercanas a la muerteDe EverandDMT: La molécula del espíritu (DMT: The Spirit Molecule): Las revolucionarias investigaciones de un medico sobre la biologia de las experiencias misticas y cercanas a la muerteCalificación: 4.5 de 5 estrellas4.5/5 (19)
- La violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaDe EverandLa violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaCalificación: 4 de 5 estrellas4/5 (2)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesDe EverandContra la ansiedad: Una guía completa para manejar emociones difícilesCalificación: 5 de 5 estrellas5/5 (58)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Cómo romper el ciclo de pensamientos negativosDe EverandCómo romper el ciclo de pensamientos negativosCalificación: 4.5 de 5 estrellas4.5/5 (274)
- Tu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaDe EverandTu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaCalificación: 5 de 5 estrellas5/5 (2)