También podría gustarte
- La Contraloría Delegada para Responsabilidad Fiscal, Intervención Judicial Y Cobro CoactivoDocumento1 páginaLa Contraloría Delegada para Responsabilidad Fiscal, Intervención Judicial Y Cobro CoactivoLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Ajustedematricula - (Luis Cogollo)Documento2 páginasAjustedematricula - (Luis Cogollo)Luis Fernando Cogollo CavadiaAún no hay calificaciones
- CertificadoDocumento1 páginaCertificadoLuis Fernando Cogollo CavadiaAún no hay calificaciones
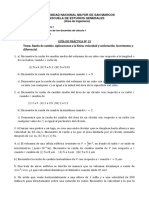
- Taller 4 BiofísicaDocumento6 páginasTaller 4 BiofísicaLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Examen ProporcionalidadDocumento1 páginaExamen ProporcionalidadLuis Fernando Cogollo CavadiaAún no hay calificaciones
- AntecedentesDocumento3 páginasAntecedentesOscarGomezAún no hay calificaciones
- Física 2 Examen Soluciones Cargas EléctricasDocumento1 páginaFísica 2 Examen Soluciones Cargas EléctricasLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Sucesiones Numéricas EjerciciosDocumento27 páginasSucesiones Numéricas EjerciciosJavier Alejandro Castruita LechugaAún no hay calificaciones
- MAPAAAADocumento11 páginasMAPAAAALuis Fernando Cogollo CavadiaAún no hay calificaciones
- TALLER SEMANA Teorema de BayesDocumento2 páginasTALLER SEMANA Teorema de BayesLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Taller 3Documento2 páginasTaller 3Luis Fernando Cogollo CavadiaAún no hay calificaciones
- Taller Semana 7Documento1 páginaTaller Semana 7Luis Fernando Cogollo CavadiaAún no hay calificaciones
- Taller 1 CepDocumento1 páginaTaller 1 CepLuis Fernando Cogollo CavadiaAún no hay calificaciones
- TALLER de Trabajo y Energía Cinética (Segundo Corte 2021 - I)Documento1 páginaTALLER de Trabajo y Energía Cinética (Segundo Corte 2021 - I)Luis Fernando Cogollo CavadiaAún no hay calificaciones
- GabiDocumento8 páginasGabiLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Topologia 1,2Documento4 páginasTopologia 1,2Luis Fernando Cogollo CavadiaAún no hay calificaciones
- 21 EjercicioDocumento2 páginas21 EjercicioLuis Fernando Cogollo CavadiaAún no hay calificaciones
- MEDIDADocumento6 páginasMEDIDALuis Fernando Cogollo CavadiaAún no hay calificaciones
- Topologia 1,2Documento4 páginasTopologia 1,2Luis Fernando Cogollo CavadiaAún no hay calificaciones
- T8 Probabilidad II PDFDocumento45 páginasT8 Probabilidad II PDFharris lagunaAún no hay calificaciones
- BiologiaDocumento5 páginasBiologiaLuis Fernando Cogollo CavadiaAún no hay calificaciones
- MEDIDADocumento6 páginasMEDIDALuis Fernando Cogollo CavadiaAún no hay calificaciones
- MAPAAAADocumento11 páginasMAPAAAALuis Fernando Cogollo CavadiaAún no hay calificaciones
- VectoresDocumento1 páginaVectoresLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Actividad de Matemáticas 5 de Matemáticas - Grado 10-Yalidis v-2021Documento2 páginasActividad de Matemáticas 5 de Matemáticas - Grado 10-Yalidis v-2021Luis Fernando Cogollo CavadiaAún no hay calificaciones
- GeometríaDocumento37 páginasGeometríaNatalia Carabajal LangeAún no hay calificaciones
- Trabajo para El Miercoles SSTDocumento5 páginasTrabajo para El Miercoles SSTLuis Fernando Cogollo CavadiaAún no hay calificaciones
- Trabajo Modelo # 1-Tercer CorteDocumento1 páginaTrabajo Modelo # 1-Tercer CorteLuis Fernando Cogollo CavadiaAún no hay calificaciones
- INFOGRAFIA#2Documento8 páginasINFOGRAFIA#2Luis Fernando Cogollo CavadiaAún no hay calificaciones
- Animales en Situación de CalleDocumento2 páginasAnimales en Situación de CalleHELEN DAYANA IBARRA HERNANDEZ100% (1)
- S01 Guía para La Selección de Técnicas GráficasDocumento56 páginasS01 Guía para La Selección de Técnicas GráficasAdrián Gálvez PinillosAún no hay calificaciones
- Segunda ExpoDocumento12 páginasSegunda ExpoJulio Garcia FuentesAún no hay calificaciones
- Modelo de Carpeta CorporativaDocumento15 páginasModelo de Carpeta CorporativaFacundoAún no hay calificaciones
- Guía de Práctica N°15 22-1Documento4 páginasGuía de Práctica N°15 22-1Tommy VercettiAún no hay calificaciones
- Aplicación de Los VectoresDocumento15 páginasAplicación de Los VectoresGilberto VaqueraAún no hay calificaciones
- 03-Tr1-Usm OkDocumento39 páginas03-Tr1-Usm OkVale OliveraAún no hay calificaciones
- Resumen, ABT Una Teoría de La Psicología ProyectivaDocumento6 páginasResumen, ABT Una Teoría de La Psicología ProyectivaVani MarcianesiAún no hay calificaciones
- Proyecto de Farmacia.1Documento75 páginasProyecto de Farmacia.1Jhojhanny Torrez100% (1)
- Humanidades V Competencias Comportamentales 2021Documento94 páginasHumanidades V Competencias Comportamentales 2021Jaiver Ruge0% (1)
- Plan de Trabajo San Juan de MarambucoDocumento3 páginasPlan de Trabajo San Juan de MarambucoannieAún no hay calificaciones
- .Archivetemp? 3° Reforzamiento Conocimiento 1,2,3 César Benavides PDFDocumento142 páginas.Archivetemp? 3° Reforzamiento Conocimiento 1,2,3 César Benavides PDFElizabeth RamirezAún no hay calificaciones
- Guia de Ejercicios Análisis de Los 7 Habitos de La Gente Altamente EfectivaDocumento4 páginasGuia de Ejercicios Análisis de Los 7 Habitos de La Gente Altamente Efectivakeyla lottzAún no hay calificaciones
- Metodo de La Fuerza HorizontalDocumento12 páginasMetodo de La Fuerza HorizontaljefersonAún no hay calificaciones
- PEDAGOGÍA 2 - El Pensamiento Pedagógico Nacional A Través Del Movimiento de Educación RuralDocumento14 páginasPEDAGOGÍA 2 - El Pensamiento Pedagógico Nacional A Través Del Movimiento de Educación RuralAgustina LopezAún no hay calificaciones
- Origen y Evolución de La AdministraciónDocumento19 páginasOrigen y Evolución de La Administraciónelianarivas20050% (1)
- Principios de ProbabilidadDocumento48 páginasPrincipios de ProbabilidadAnel OlmedoAún no hay calificaciones
- Examen de Formulacion de ProyectosDocumento5 páginasExamen de Formulacion de ProyectosjuanAún no hay calificaciones
- Comentario de Texto Bach - JJMillásDocumento2 páginasComentario de Texto Bach - JJMillásAnaFerLylAún no hay calificaciones
- SFD FSDF SDFDocumento150 páginasSFD FSDF SDFjorge musajaAún no hay calificaciones
- Actividad 6 CRUCIGRAMA PDFDocumento5 páginasActividad 6 CRUCIGRAMA PDFerika herreraAún no hay calificaciones
- Japones Básico 4 Clase 3 FALTA EDITARDocumento6 páginasJapones Básico 4 Clase 3 FALTA EDITARPEDRO JESÚS QUISPE CARTOLINAún no hay calificaciones
- Analisis Tecnico Vs Analisis FundamentalDocumento10 páginasAnalisis Tecnico Vs Analisis Fundamentalliz cadenaAún no hay calificaciones
- ?cuadernillo 3° Final de CicloDocumento28 páginas?cuadernillo 3° Final de Ciclolenilla boniceAún no hay calificaciones
- 3-TRAVERSO, Enzo, El Totalitarismo. Historia de Un Debate, Cap. XII, "Nazismo y Estalinismo - El Concepto de Totalitarismo Puesto A Prueba Por El Comparativismo Histórico", B.A, EUDEBA, 2001.Documento11 páginas3-TRAVERSO, Enzo, El Totalitarismo. Historia de Un Debate, Cap. XII, "Nazismo y Estalinismo - El Concepto de Totalitarismo Puesto A Prueba Por El Comparativismo Histórico", B.A, EUDEBA, 2001.examen FCSAún no hay calificaciones
- T-DSSP - PL - 17-18 D 42-96Documento28 páginasT-DSSP - PL - 17-18 D 42-96Pablo de LlanosAún no hay calificaciones
- Medición y Conversión de UnidadesDocumento22 páginasMedición y Conversión de UnidadesJose Luis100% (1)
- Reporte 1 - Eq4 - P1 - PosologíaDocumento28 páginasReporte 1 - Eq4 - P1 - PosologíaRodolfo TovarAún no hay calificaciones
- Terapia Acuática Abordajes Desde La Fisioterapia y La Terapia Ocupacional (Spanish Edition) by Javier Güeita Rodríguez (Rodríguez, Javier Güeita)Documento617 páginasTerapia Acuática Abordajes Desde La Fisioterapia y La Terapia Ocupacional (Spanish Edition) by Javier Güeita Rodríguez (Rodríguez, Javier Güeita)Kira100% (3)
- Tarea 1 AdministracionDocumento9 páginasTarea 1 Administracionelaine artilesAún no hay calificaciones
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Aprender HTML5, CSS3 y Javascript con 100 ejereciosDe EverandAprender HTML5, CSS3 y Javascript con 100 ejereciosCalificación: 5 de 5 estrellas5/5 (2)
- Scrum Las Estrategias del Juego: Es Póker, No AjedrezDe EverandScrum Las Estrategias del Juego: Es Póker, No AjedrezCalificación: 5 de 5 estrellas5/5 (1)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)