100% encontró este documento útil (2 votos)
2K vistas109 páginasLaboratorio N°6-Lvsim-Ems
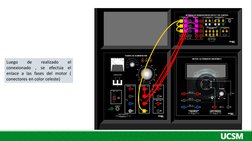
Este documento presenta una introducción al uso del software LVSIM-EMS para simular circuitos eléctricos. Se describe cómo configurar un circuito con un motor síncrono, una fuente de alimentación y un interfaz de adquisición de datos. Luego, se explica cómo conectar estos componentes y realizar mediciones de tensión y corriente del motor. Finalmente, se agrega un dinamómetro al circuito para medir el par del motor.
Cargado por
nelson sevillano zuñigaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
100% encontró este documento útil (2 votos)
2K vistas109 páginasLaboratorio N°6-Lvsim-Ems
Este documento presenta una introducción al uso del software LVSIM-EMS para simular circuitos eléctricos. Se describe cómo configurar un circuito con un motor síncrono, una fuente de alimentación y un interfaz de adquisición de datos. Luego, se explica cómo conectar estos componentes y realizar mediciones de tensión y corriente del motor. Finalmente, se agrega un dinamómetro al circuito para medir el par del motor.
Cargado por
nelson sevillano zuñigaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd