También podría gustarte
- Ejercicios Capitulo 3Documento42 páginasEjercicios Capitulo 3LuisOrdoñez100% (2)
- Ejercicios Capítulo 1Documento38 páginasEjercicios Capítulo 1LuisOrdoñez100% (1)
- 200 ProblemasDocumento79 páginas200 ProblemasLuisOrdoñez100% (1)
- Berrezueta Ordoñez EC7 DSPDocumento20 páginasBerrezueta Ordoñez EC7 DSPLuisOrdoñezAún no hay calificaciones
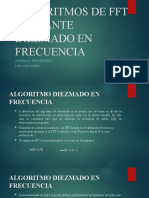
- Algoritmos de FFT Mediante Diezmado en FrecuenciaDocumento5 páginasAlgoritmos de FFT Mediante Diezmado en FrecuenciaLuisOrdoñezAún no hay calificaciones
- Corrección Evaluación 2Documento3 páginasCorrección Evaluación 2LuisOrdoñezAún no hay calificaciones
- Ordoñez Luis TC1 LabDSPDocumento9 páginasOrdoñez Luis TC1 LabDSPLuisOrdoñezAún no hay calificaciones
- Programas Eco y ReverberacionDocumento184 páginasProgramas Eco y ReverberacionLuisOrdoñezAún no hay calificaciones
- Ordoñez Luis TC4 LabDocumento10 páginasOrdoñez Luis TC4 LabLuisOrdoñezAún no hay calificaciones
- Mapeo Conforme Ecuación PoissonDocumento5 páginasMapeo Conforme Ecuación PoissonLuisOrdoñezAún no hay calificaciones
- CSD. Tema 1 Al 9Documento88 páginasCSD. Tema 1 Al 9Jordi SantosAún no hay calificaciones
- Maestria en Automatizacion Y Control IndustrialDocumento24 páginasMaestria en Automatizacion Y Control IndustrialPapelON -SmartnetAún no hay calificaciones
- 10 Cursos Gratuitos Online Sobre Tecnología para 2024Documento4 páginas10 Cursos Gratuitos Online Sobre Tecnología para 2024crgoa7Aún no hay calificaciones
- Sdyp Tarea#1Documento3 páginasSdyp Tarea#1Alejandra EscamillaAún no hay calificaciones
- Lenguaje ScalaDocumento9 páginasLenguaje ScalaWelmer Lizunde DamianoAún no hay calificaciones
- Trea 1 PLC CimDocumento11 páginasTrea 1 PLC CimRAMOS NAVARRETE SHERILIN MARIELAAún no hay calificaciones
- Guia Computación - (Pet 223)Documento177 páginasGuia Computación - (Pet 223)Ronald Sergio Ortuño PosarriAún no hay calificaciones
- Sistemas ExpertosDocumento2 páginasSistemas ExpertosQuenta C. EdwinAún no hay calificaciones
- Tarea Modulo I - Herramientas ColaborativasDocumento7 páginasTarea Modulo I - Herramientas ColaborativasEunice Polonias S.Aún no hay calificaciones
- Automatas 3Documento26 páginasAutomatas 3Danny Tapias Duque100% (2)
- Introducción A FlashDocumento3 páginasIntroducción A FlashGuido GomezAún no hay calificaciones
- Controladores o Drivers de Dispositivos - InformaticaDocumento5 páginasControladores o Drivers de Dispositivos - InformaticaLucas UgazioAún no hay calificaciones
- Sintesis Sobre Tipos de ComputadorasDocumento3 páginasSintesis Sobre Tipos de ComputadorasMariana OrtizAún no hay calificaciones
- Guía Informática 6o. Infantil I Bim.Documento2 páginasGuía Informática 6o. Infantil I Bim.Preciosa MathiasAún no hay calificaciones
- Dominio Del ProblemaDocumento5 páginasDominio Del ProblemaSomeone DumbAún no hay calificaciones
- Guía de Clase 19Documento10 páginasGuía de Clase 19Jose NoriegaAún no hay calificaciones
- Manual Computadores Nuevos w10Documento9 páginasManual Computadores Nuevos w10Humberto RuizAún no hay calificaciones
- SI01 TareaDocumento33 páginasSI01 TareaJavier Peonza0% (1)
- Función Principal de La Tarjeta MadreDocumento9 páginasFunción Principal de La Tarjeta MadreOrlando BojAún no hay calificaciones
- Ejemplo Simple de Una Planeación de Personal Mediante Programación Lineal: Planteamiento, Formulación y Solución.Documento5 páginasEjemplo Simple de Una Planeación de Personal Mediante Programación Lineal: Planteamiento, Formulación y Solución.Leonardo Gabriel Hernández Landa0% (2)
- Quiz 1 - Semana 4 Front EndDocumento9 páginasQuiz 1 - Semana 4 Front Endjulian andresAún no hay calificaciones
- Memoria RAMDocumento10 páginasMemoria RAMCarlos GarciaAún no hay calificaciones
- Resumen RinDocumento137 páginasResumen RinIgnacio Pieve RoigerAún no hay calificaciones
- Unidad 1 Python InicialDocumento29 páginasUnidad 1 Python InicialSantiago Lopez KrolAún no hay calificaciones
- Tarea 5 POODocumento19 páginasTarea 5 POOJUAN DANIEL VILLATORO RODRIGUEZAún no hay calificaciones
- ACA 2 (Enrutamiento y Conmutación en Redes)Documento17 páginasACA 2 (Enrutamiento y Conmutación en Redes)samir cordobaAún no hay calificaciones
- Manual Procedimiento para Aplicar La Nueva Política de Seguridad de Google en Cuenta Gmail ZeusDocumento7 páginasManual Procedimiento para Aplicar La Nueva Política de Seguridad de Google en Cuenta Gmail ZeusDiego VizcainoAún no hay calificaciones
- Manual Cat Inspect MobileDocumento27 páginasManual Cat Inspect MobileRicardo TorresAún no hay calificaciones
- M1 Inteligencia Artificial Lectura 2Documento17 páginasM1 Inteligencia Artificial Lectura 2XxxAún no hay calificaciones
- (Prey Project) Onboarding ComercialDocumento11 páginas(Prey Project) Onboarding ComercialPrüfer SPAAún no hay calificaciones