También podría gustarte
- Universidad Politécnica SalesianaDocumento5 páginasUniversidad Politécnica SalesianaRicardo CampoAún no hay calificaciones
- Tarea 6Documento2 páginasTarea 6Ricardo CampoAún no hay calificaciones
- Informe 2Documento5 páginasInforme 2Ricardo CampoAún no hay calificaciones
- Informe LabDocumento8 páginasInforme LabRicardo CampoAún no hay calificaciones
- Informe 2Documento5 páginasInforme 2Ricardo CampoAún no hay calificaciones
- Taller Comunicacion1Documento3 páginasTaller Comunicacion1Ricardo CampoAún no hay calificaciones
- Examen CNCDocumento10 páginasExamen CNCRicardo CampoAún no hay calificaciones
- Taller Comunicacion1Documento3 páginasTaller Comunicacion1Ricardo CampoAún no hay calificaciones
- Informe FinalDocumento6 páginasInforme FinalRicardo CampoAún no hay calificaciones
- ZAMBRANOY - Practica de Laboratorio N°3 - Cartas Control de Levey JennigsDocumento8 páginasZAMBRANOY - Practica de Laboratorio N°3 - Cartas Control de Levey JennigsRicardo CampoAún no hay calificaciones
- Examen CNC PDFDocumento11 páginasExamen CNC PDFRicardo CampoAún no hay calificaciones
- EngranajesDocumento11 páginasEngranajesRicardo CampoAún no hay calificaciones
- Clasificación de Los Zurdos y Los DiestrosDocumento1 páginaClasificación de Los Zurdos y Los DiestrosRicardo CampoAún no hay calificaciones
- Lectura PandemiaDocumento10 páginasLectura PandemiaDeika CastilloAún no hay calificaciones
- Interpretacion RapidaDocumento19 páginasInterpretacion RapidaFlores Escalante Alexi100% (1)
- Eq07_ITA71_PolimerosDocumento30 páginasEq07_ITA71_PolimerosLissette SmileAún no hay calificaciones
- SednaDocumento13 páginasSednaRusbel MarteAún no hay calificaciones
- Cuadro COMPARATIVO BENEFICIOS Y DESVENTAJAS DECRETOS PRO ESTADO DE EMERGENCIADocumento8 páginasCuadro COMPARATIVO BENEFICIOS Y DESVENTAJAS DECRETOS PRO ESTADO DE EMERGENCIALianMat 97Aún no hay calificaciones
- Modelo Humanista Existencial Segunda Parte Tarea SantosDocumento2 páginasModelo Humanista Existencial Segunda Parte Tarea SantosevrogarAún no hay calificaciones
- Informe Patologias en Pavimentos RigidosDocumento14 páginasInforme Patologias en Pavimentos RigidosMerlingcitha DiazAún no hay calificaciones
- Sociales Guia 1Documento5 páginasSociales Guia 1Hasly GuzmanAún no hay calificaciones
- Taller Tránsito, Transporte Y Seguridad Vial.Documento7 páginasTaller Tránsito, Transporte Y Seguridad Vial.Monica JaramilloAún no hay calificaciones
- Adn de Las ProteinasDocumento16 páginasAdn de Las ProteinasJhon Seebastiian TabaaresAún no hay calificaciones
- Descorne Bovino InfografiaDocumento3 páginasDescorne Bovino Infografiakevin guadalupe manzanares bonillaAún no hay calificaciones
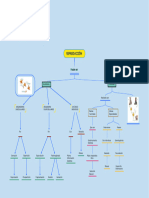
- Mapa Mental - 202314 - 95839Documento1 páginaMapa Mental - 202314 - 95839joseluisAún no hay calificaciones
- UntitledDocumento30 páginasUntitledAnderson LejaboAún no hay calificaciones
- Evaluación Comprensión de Lectura 1Documento8 páginasEvaluación Comprensión de Lectura 1Carolina SilvaAún no hay calificaciones
- Apuntes Del OjoDocumento2 páginasApuntes Del OjoEliana Umba PeñaAún no hay calificaciones
- AleeejaDocumento15 páginasAleeejaAle ArriagaAún no hay calificaciones
- Practica de Filtración-Pico VeraDocumento8 páginasPractica de Filtración-Pico VeraKatherine PicoAún no hay calificaciones
- HAZCOMDocumento1 páginaHAZCOMjrraf61Aún no hay calificaciones
- Apuntes Cinemática 4º ESO 2020 AlumnosDocumento18 páginasApuntes Cinemática 4º ESO 2020 Alumnospepe suarezAún no hay calificaciones
- Volvo Penta Manual de Instrucciones PDFDocumento200 páginasVolvo Penta Manual de Instrucciones PDFedgar luis50% (2)
- Vìa ExtrapiramidalDocumento14 páginasVìa ExtrapiramidalToita PonceAún no hay calificaciones
- Desarrollo Del Espiritismo para Engaño FinalDocumento15 páginasDesarrollo Del Espiritismo para Engaño FinalJose Ruperto GalarzaAún no hay calificaciones
- Tesina 3er ParcialDocumento30 páginasTesina 3er ParcialTHS JajsAún no hay calificaciones
- 000010287Documento10 páginas000010287jesrcontreras1976Aún no hay calificaciones
- Unidad 3-2003 PDFDocumento15 páginasUnidad 3-2003 PDFMarcos Gonzalez100% (1)
- Electronica Recortadores y Cambiadores de NivelDocumento9 páginasElectronica Recortadores y Cambiadores de Niveljoseph.cedeno.castroAún no hay calificaciones
- 793f m09 Sistema de Freno en TextoDocumento52 páginas793f m09 Sistema de Freno en Textoalberto100% (3)
- P1 - Banqueo - Finales - Farmacología 2023 - CURSOS MÉDICOSDocumento27 páginasP1 - Banqueo - Finales - Farmacología 2023 - CURSOS MÉDICOSAlvaro AnguloAún no hay calificaciones
- S01.s2 QUIMICA JPD AGOSTO 2022 Estructura AtómicaDocumento37 páginasS01.s2 QUIMICA JPD AGOSTO 2022 Estructura AtómicaAngie Nuñez CuelaAún no hay calificaciones
- Acabados en TechoDocumento18 páginasAcabados en TechoEnyis Caroline MartinezAún no hay calificaciones