También podría gustarte
- Modal identification using smart mobile sensing unitsDe EverandModal identification using smart mobile sensing unitsAún no hay calificaciones
- Sistema de Alerta Sismica Diseño de Un AcelerometroDocumento6 páginasSistema de Alerta Sismica Diseño de Un Acelerometrowilliam abel taboada gambiniAún no hay calificaciones
- Deteccion de SismosDocumento50 páginasDeteccion de SismosJunior Orosco CasasAún no hay calificaciones
- Tesis VerdaderaDocumento23 páginasTesis VerdaderaAnthony Soto MaytaAún no hay calificaciones
- Validación Experimental Del Uso Del Sensor Arduino Uno para La Determinación de Aceleraciones y Desplazamientos en EstructurasDocumento20 páginasValidación Experimental Del Uso Del Sensor Arduino Uno para La Determinación de Aceleraciones y Desplazamientos en EstructurasRicardo CarguaitongoAún no hay calificaciones
- Resumen AnteproyectoDocumento4 páginasResumen AnteproyectotatianaAún no hay calificaciones
- La Historia y El Futuro de Los SismosDocumento4 páginasLa Historia y El Futuro de Los SismosKevin ChumioqueAún no hay calificaciones
- Practica TelemetriaDocumento9 páginasPractica TelemetriaDania CarolinaAún no hay calificaciones
- Actividad Autónoma Nº12Documento6 páginasActividad Autónoma Nº12Arianna Jadan RiosAún no hay calificaciones
- ACELEROGRAf ODocumento17 páginasACELEROGRAf ONatalie Sayago SilvaAún no hay calificaciones
- Matlab y Sensor UltrasónicoDocumento9 páginasMatlab y Sensor UltrasónicoAnthony AlexanderAún no hay calificaciones
- Fase 2 Grupo 203055 48 Oscar ColmenaresDocumento4 páginasFase 2 Grupo 203055 48 Oscar ColmenaresOscar ColmenaresAún no hay calificaciones
- Fase 2 Manuel Jimenez Grupo 4Documento12 páginasFase 2 Manuel Jimenez Grupo 4Roberto SierraAún no hay calificaciones
- Desarrollo E Implementación de Un Sistema de Monitoreo Estructural en Tiempo Real para Un Edificio en Escala RealDocumento14 páginasDesarrollo E Implementación de Un Sistema de Monitoreo Estructural en Tiempo Real para Un Edificio en Escala RealALONSO JARAMILLO HIDALGOAún no hay calificaciones
- Proyecto de GradoDocumento11 páginasProyecto de GradoAdolfo Padilla100% (1)
- Aplicacion de La Inteligencia ArtificialDocumento2 páginasAplicacion de La Inteligencia ArtificialDianne CarolinaAún no hay calificaciones
- Monitoreo 36 2Documento12 páginasMonitoreo 36 2Laura Lara OrtizAún no hay calificaciones
- Quantum Sensors ProyectDocumento18 páginasQuantum Sensors ProyecteaprincipequAún no hay calificaciones
- SENIEDocumento15 páginasSENIEAndres GomezAún no hay calificaciones
- Diseño e Implementacion Iot2Documento10 páginasDiseño e Implementacion Iot2Gustavo AlmanzaAún no hay calificaciones
- Sistema de alerta GPS para accidentes de motocicletasDocumento7 páginasSistema de alerta GPS para accidentes de motocicletasalfonsoAún no hay calificaciones
- Proyecto PresentacionDocumento41 páginasProyecto PresentacionRetamal Gamonal PabloAún no hay calificaciones
- Environmental Monitoring Using Embedded Systems On UAVSDocumento8 páginasEnvironmental Monitoring Using Embedded Systems On UAVSEMMA GREGORIO PEREZAún no hay calificaciones
- Introducción A Tecnologías de La InformaciónDocumento12 páginasIntroducción A Tecnologías de La InformaciónJulian TorresAún no hay calificaciones
- Importante 1Documento14 páginasImportante 1Yeferson SilvaAún no hay calificaciones
- Acelerografos y AcelerogramasDocumento10 páginasAcelerografos y AcelerogramasGuido Orvezo ZamudioAún no hay calificaciones
- Ingenieria en TelecomunicacionesDocumento189 páginasIngenieria en TelecomunicacionesJona RobAún no hay calificaciones
- Tecnologías Que Se Apliquen en El Transporte TerrestreDocumento2 páginasTecnologías Que Se Apliquen en El Transporte Terrestrenatalia1020Aún no hay calificaciones
- Ensayo GeomaticaDocumento4 páginasEnsayo GeomaticaisaacAún no hay calificaciones
- Control de Edificios Con SensoresDocumento15 páginasControl de Edificios Con SensoresJairo StalinAún no hay calificaciones
- SesionesDocumento54 páginasSesionesJota JotaAún no hay calificaciones
- 15658-Texto Del Artículo-79966-4-10-20200726 - 2Documento8 páginas15658-Texto Del Artículo-79966-4-10-20200726 - 2Mariana Lobato BaezAún no hay calificaciones
- CompUbíc y ciudades inteligentesDocumento6 páginasCompUbíc y ciudades inteligentesJosé BatistaAún no hay calificaciones
- Estado Del Arte para App de SismosDocumento3 páginasEstado Del Arte para App de SismosDavid Aguilar RodriguezAún no hay calificaciones
- Actividad 3Documento5 páginasActividad 3Gabo CrassusAún no hay calificaciones
- Fase 1 Deibi MuñozDocumento13 páginasFase 1 Deibi MuñozFabian MuñozAún no hay calificaciones
- Ex Amen Primer Parcial Daniel and One yDocumento3 páginasEx Amen Primer Parcial Daniel and One yDaniel Andoney ValdezAún no hay calificaciones
- Articulo SeñalesDocumento3 páginasArticulo SeñalesLorena TellezAún no hay calificaciones
- Modelo A Analizar - TB01 - Mecatronica - 2022-02Documento10 páginasModelo A Analizar - TB01 - Mecatronica - 2022-02karla grimaldoAún no hay calificaciones
- Documento Completo PDFDocumento5 páginasDocumento Completo PDFjohan andrés avendaño gómezAún no hay calificaciones
- Planifiación (1) (1) (1) - 1Documento3 páginasPlanifiación (1) (1) (1) - 1LUIS ANTONY HUISA NINAAún no hay calificaciones
- Sensores RemotosDocumento28 páginasSensores RemotosprsigAún no hay calificaciones
- Practica 1. Productos de Sensores Remotos (Imágenes de Satélite y Fotografías Aéreas) en LíneaDocumento5 páginasPractica 1. Productos de Sensores Remotos (Imágenes de Satélite y Fotografías Aéreas) en LíneaCamilo GonzalezAún no hay calificaciones
- Nodos SensoresDocumento8 páginasNodos SensoresDJ Rossa100% (1)
- 73-Texto Del Artículo-194-2-10-20211229Documento9 páginas73-Texto Del Artículo-194-2-10-20211229R Carlos OliveraAún no hay calificaciones
- Diseño de un guante de datos con sensores de flexibilidad y acelerómetroDocumento7 páginasDiseño de un guante de datos con sensores de flexibilidad y acelerómetroEduardo ReyesAún no hay calificaciones
- Cubo de Datos Abierto - For - Natural - Resources - Mapping - in - MexicoDocumento9 páginasCubo de Datos Abierto - For - Natural - Resources - Mapping - in - MexicoFlor Rocío EspinosaAún no hay calificaciones
- ETN-340 Aruquipa Guzman Julian SergioDocumento17 páginasETN-340 Aruquipa Guzman Julian Sergiojulian aruquipaAún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1Manuel PachecoAún no hay calificaciones
- Estacion Meteorologica InhalambricaDocumento8 páginasEstacion Meteorologica InhalambricaAlfredo VillalobosAún no hay calificaciones
- Diseño de Una Arquitectura para Redes de Sensores Con Soporte de Deteccion de EventosDocumento141 páginasDiseño de Una Arquitectura para Redes de Sensores Con Soporte de Deteccion de EventoslaboratorAún no hay calificaciones
- Capitulo I Jose Hernandez ModificadoDocumento8 páginasCapitulo I Jose Hernandez Modificadoingry2507Aún no hay calificaciones
- 4935 Editorial Sistema DistribuidoDocumento9 páginas4935 Editorial Sistema DistribuidoAldo Gerardo Parrales LeónAún no hay calificaciones
- Descárgate Un Programa para Generar Acelerómetros SintéticosDocumento5 páginasDescárgate Un Programa para Generar Acelerómetros SintéticosEdwin Walter Torres CarrascoAún no hay calificaciones
- Artículo Sistema Satelital NOOADocumento12 páginasArtículo Sistema Satelital NOOACésar Augusto Guilcamaigua GuamushigAún no hay calificaciones
- Fase 2 Grupo 11 PropuestaDocumento12 páginasFase 2 Grupo 11 PropuestaDuban DelgadilloAún no hay calificaciones
- Tarea #8 Selenzo Fernandez IvanDocumento39 páginasTarea #8 Selenzo Fernandez IvanIvan Selenzo FernándezAún no hay calificaciones
- SO para Internet de Las CosasDocumento30 páginasSO para Internet de Las CosasDaisuke KawasakiAún no hay calificaciones
- González, Lucia - Desarrollo de Una Interfaz Cerebro-Ordenador (BCI) para Aplicaciones RoboticasDocumento6 páginasGonzález, Lucia - Desarrollo de Una Interfaz Cerebro-Ordenador (BCI) para Aplicaciones Roboticasgabriel carranzaAún no hay calificaciones
- T2 - Introduccion Datos VR 03jul2020 LACFDocumento5 páginasT2 - Introduccion Datos VR 03jul2020 LACFNatalia Valencia GonzálezAún no hay calificaciones
- U1 - S3 - Ejercicios para Actividad Virtual - GCDocumento17 páginasU1 - S3 - Ejercicios para Actividad Virtual - GCGimar2Aún no hay calificaciones
- U1 - S3 - Ejercicios para Actividad Virtual - GCDocumento17 páginasU1 - S3 - Ejercicios para Actividad Virtual - GCGimar2Aún no hay calificaciones
- Metodo de Gauss para Encontrar La MatrizDocumento27 páginasMetodo de Gauss para Encontrar La MatrizFrank Leny Ccapa UscaAún no hay calificaciones
- Ejer Cici OsDocumento4 páginasEjer Cici OsFrank Leny Ccapa UscaAún no hay calificaciones
- Semana 2 - Fuentes de Información - Tarea Académica 1Documento6 páginasSemana 2 - Fuentes de Información - Tarea Académica 1Frank Leny Ccapa UscaAún no hay calificaciones
- Tm4mus6 PDFDocumento266 páginasTm4mus6 PDFFranciscaLangeAún no hay calificaciones
- Trabajo Colaborativo 3-ADocumento2 páginasTrabajo Colaborativo 3-AFrank Leny Ccapa UscaAún no hay calificaciones
- Semana 02-Tema 01 - Tarea Académica 1Documento2 páginasSemana 02-Tema 01 - Tarea Académica 1Frank Leny Ccapa UscaAún no hay calificaciones
- Trabajo Colaborativo 2-ADocumento2 páginasTrabajo Colaborativo 2-AFrank Leny Ccapa UscaAún no hay calificaciones
- Practica 01-Fundamentos de Pruebas de SoftwareDocumento1 páginaPractica 01-Fundamentos de Pruebas de SoftwareFrank Leny Ccapa UscaAún no hay calificaciones
- S06.s1 - MaterialDocumento19 páginasS06.s1 - Materialbanesa lopezAún no hay calificaciones
- Practica - Casos de Prueba de SoftwareDocumento1 páginaPractica - Casos de Prueba de SoftwarenecrotemadoAún no hay calificaciones
- Guia de Laboratorio 05Documento16 páginasGuia de Laboratorio 05Frank Leny Ccapa UscaAún no hay calificaciones
- S05.s2 - Material - EjerciciosDocumento18 páginasS05.s2 - Material - EjerciciosJesus Matias ArnesquitoAún no hay calificaciones
- Guia Lab6-EntornoBison NewDocumento15 páginasGuia Lab6-EntornoBison NewFrank Leny Ccapa UscaAún no hay calificaciones
- Guia Lab6-EntornoBisonDocumento17 páginasGuia Lab6-EntornoBisonFrank Leny Ccapa UscaAún no hay calificaciones
- Guia Lab6 EntornoBisonDocumento15 páginasGuia Lab6 EntornoBisonFrank Leny Ccapa UscaAún no hay calificaciones
- Analizador Lexico - Lab 4Documento21 páginasAnalizador Lexico - Lab 4Frank Leny Ccapa UscaAún no hay calificaciones
- El eterno primer lugarDocumento522 páginasEl eterno primer lugarFrank Leny Ccapa UscaAún no hay calificaciones
- GIVEN - CASO Estudio - Renta de BicicletaDocumento19 páginasGIVEN - CASO Estudio - Renta de BicicletaFrank Leny Ccapa UscaAún no hay calificaciones
- Examen 2 RLM Extemporáneo PDFDocumento1 páginaExamen 2 RLM Extemporáneo PDFVictor Vidal H RAún no hay calificaciones
- Ending Maker 03Documento538 páginasEnding Maker 03Frank Leny Ccapa UscaAún no hay calificaciones
- Sucesiones-Series - Aritmeticas y GeometricasDocumento11 páginasSucesiones-Series - Aritmeticas y GeometricasHUGO GOMEZ CHAHUA0% (1)
- Ending Maker 02Documento496 páginasEnding Maker 02Frank Leny Ccapa UscaAún no hay calificaciones
- Sucesiones-Series - Aritmeticas y GeometricasDocumento11 páginasSucesiones-Series - Aritmeticas y GeometricasHUGO GOMEZ CHAHUA0% (1)
- Sucesiones-Series - Aritmeticas y GeometricasDocumento11 páginasSucesiones-Series - Aritmeticas y GeometricasHUGO GOMEZ CHAHUA0% (1)
- Sumatorias FDocumento2 páginasSumatorias FFrank Leny Ccapa UscaAún no hay calificaciones
- GIVEN - CASO Estudio - Renta de BicicletaDocumento19 páginasGIVEN - CASO Estudio - Renta de BicicletaFrank Leny Ccapa UscaAún no hay calificaciones
- DesignExercise en EsDocumento42 páginasDesignExercise en EsFrank Leny Ccapa UscaAún no hay calificaciones
- Sucesiones Series1Documento22 páginasSucesiones Series1Frank Leny Ccapa UscaAún no hay calificaciones
- Webinar 27001 PDFDocumento21 páginasWebinar 27001 PDFjulian_morales_24Aún no hay calificaciones
- Config VLANDocumento10 páginasConfig VLANMiguel RamirezAún no hay calificaciones
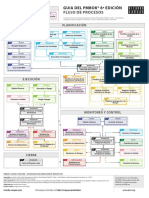
- Ricardo Vargas Simplified Pmbok Flow 6ed Color ES-A3Documento1 páginaRicardo Vargas Simplified Pmbok Flow 6ed Color ES-A3rmendoza85Aún no hay calificaciones
- Kaspersky Lanza Una Herramienta para Eliminar El Troyano Flashback Investing in A EGA Futura Sistema de Facturacion Concepto? Think About These AdvicesDocumento2 páginasKaspersky Lanza Una Herramienta para Eliminar El Troyano Flashback Investing in A EGA Futura Sistema de Facturacion Concepto? Think About These Advicesmimosa7gooseAún no hay calificaciones
- CV dcp7060d Chlargspa Busr Lej002031Documento118 páginasCV dcp7060d Chlargspa Busr Lej002031Esteban Franco PedreroAún no hay calificaciones
- FM02 Instrumento de Evaluación de La Prueba de Entrada ALR PRESENCIALDocumento2 páginasFM02 Instrumento de Evaluación de La Prueba de Entrada ALR PRESENCIALFranco Arivilca MirandaAún no hay calificaciones
- Extraordinario Procesos en La Administración de ProyectosDocumento22 páginasExtraordinario Procesos en La Administración de ProyectosRicardo Alberto Carbajal Sanchez100% (1)
- CostoTotalProyectoUNLike3RDocumento1 páginaCostoTotalProyectoUNLike3RADRIANA PATRICIA HOYOS NIEVAAún no hay calificaciones
- A2 - While vs. Do - While, ForeachDocumento5 páginasA2 - While vs. Do - While, ForeachPedriño GomezzAún no hay calificaciones
- Brief CreativoDocumento7 páginasBrief CreativoGladys Quispe100% (1)
- Grupo 6optimizacion de Mototraillas y RetroexcavadorasDocumento8 páginasGrupo 6optimizacion de Mototraillas y RetroexcavadorasJuan Carlos SandovalAún no hay calificaciones
- Deber 2Documento18 páginasDeber 2Israel Paez Sanchez33% (3)
- Material Examen Final Arquitectura PropietariaDocumento36 páginasMaterial Examen Final Arquitectura PropietariaOlivier CajusteAún no hay calificaciones
- Métodos numéricos: Iteración de punto fijoDocumento4 páginasMétodos numéricos: Iteración de punto fijoRoberto RoseroAún no hay calificaciones
- Taller Excel Avanzado 1Documento9 páginasTaller Excel Avanzado 1leonardoduarteAún no hay calificaciones
- Milton Ruiz Diaz 1° de InformáticaDocumento4 páginasMilton Ruiz Diaz 1° de InformáticaOtaku de VidaAún no hay calificaciones
- Configuración IGT S-Plus en 13 pasosDocumento3 páginasConfiguración IGT S-Plus en 13 pasoscucho_666Aún no hay calificaciones
- HowTo-Configurar Un Servidor LDAP Esclavo de ServicioDocumento3 páginasHowTo-Configurar Un Servidor LDAP Esclavo de ServicioDavid MéridaAún no hay calificaciones
- Contrato AfiliaciónDocumento1 páginaContrato AfiliaciónZhang AlejandroAún no hay calificaciones
- If o ElseDocumento12 páginasIf o Elseestadistico17Aún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Fase 3 - Integrar El Potencial de Las Comunicaciones Industriales AvanzadasDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Fase 3 - Integrar El Potencial de Las Comunicaciones Industriales AvanzadasXimenaLadinoAún no hay calificaciones
- Funciones de Las Teclas f1 A La f12Documento7 páginasFunciones de Las Teclas f1 A La f12Liss BarretoAún no hay calificaciones
- Manual de Usuario DNC v3 Stps PlataformaDocumento81 páginasManual de Usuario DNC v3 Stps PlataformaOmar RiosAún no hay calificaciones
- Guia de Pasos de Configuración Telefonia y Datos PDFDocumento12 páginasGuia de Pasos de Configuración Telefonia y Datos PDFBrayan Camilo IbañezAún no hay calificaciones
- Hamachi Guía de InicioDocumento22 páginasHamachi Guía de Inicioadri923Aún no hay calificaciones
- Caso - Metodo Pert CPMDocumento8 páginasCaso - Metodo Pert CPMMax Raul Gonzales ArmasAún no hay calificaciones
- CV Ingrid Llanco LV 240518Documento53 páginasCV Ingrid Llanco LV 240518Ingrid LlancoAún no hay calificaciones
- Software EstadísticoDocumento8 páginasSoftware EstadísticoAldair RiosAún no hay calificaciones
- Pruebas de IntegraciónDocumento22 páginasPruebas de IntegraciónSantiago ViñanAún no hay calificaciones
- Taller Excel 1 2017 - 1Documento2 páginasTaller Excel 1 2017 - 1Lina María Pineda MuñozAún no hay calificaciones