También podría gustarte
- Aulas TinkercadDocumento5 páginasAulas TinkercadSergio Marcelo CejasAún no hay calificaciones
- Historia de IsabelDocumento4 páginasHistoria de Isabelana esmeralda pinedaAún no hay calificaciones
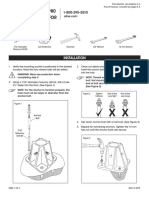
- Manua de Instalacion - Maxtrack Hitch 3 Toy Fortuner SW4 2019Documento5 páginasManua de Instalacion - Maxtrack Hitch 3 Toy Fortuner SW4 2019Sergio Alejandro AlvaradoAún no hay calificaciones
- Manual Técnico Del Producto: Ascensor MP Go!Documento6 páginasManual Técnico Del Producto: Ascensor MP Go!Jose Gabriel Pedraza FernandezAún no hay calificaciones
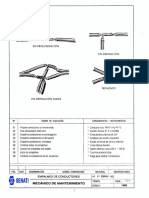
- Ítem Descripción Símbolo Referencia Área de Diseño Tiempo de CicloDocumento2 páginasÍtem Descripción Símbolo Referencia Área de Diseño Tiempo de Ciclojavier rivera zapataAún no hay calificaciones
- Ultra Whisper Wogrid Inst Spanish 1773 Rev 8Documento1 páginaUltra Whisper Wogrid Inst Spanish 1773 Rev 8Christian PerezAún no hay calificaciones
- PM Aplic Manual BP Es 3mDocumento4 páginasPM Aplic Manual BP Es 3mJimmy Gomez CcorahuaAún no hay calificaciones
- Ih 4979 SPFRDocumento6 páginasIh 4979 SPFRRodolfo Chavez NavarroAún no hay calificaciones
- Manual Solo Condominio 1.5Documento30 páginasManual Solo Condominio 1.5kennymirandacollectionAún no hay calificaciones
- Formato-Instructivo para Instalacion de Pines Expander en La ArticulacionDocumento8 páginasFormato-Instructivo para Instalacion de Pines Expander en La Articulacionronys caballeroAún no hay calificaciones
- Vestida de PostesDocumento8 páginasVestida de PostesJason TujueloAún no hay calificaciones
- Divan Ginecologico GimaDocumento3 páginasDivan Ginecologico GimaUss ChapineroAún no hay calificaciones
- Ejercicios de CroquisadoDocumento24 páginasEjercicios de CroquisadoWiñay Qhantati Ururi Base CuscoAún no hay calificaciones
- ESCO Instructions EspañolDocumento25 páginasESCO Instructions Españolmario diego simeonAún no hay calificaciones
- Comunicado Vento 176. Instalación de Rompevientos de Las Unidades Hypster 2023Documento5 páginasComunicado Vento 176. Instalación de Rompevientos de Las Unidades Hypster 2023jordan.gonzalezvnaAún no hay calificaciones
- Armar Carpa DOITE PDFDocumento1 páginaArmar Carpa DOITE PDFMonchouno100% (3)
- Dunlop - Manual de Empalme Dedos Banda TextilDocumento19 páginasDunlop - Manual de Empalme Dedos Banda Textilmarco antonio talavera salazarAún no hay calificaciones
- Manual BR1F SpanishDocumento1 páginaManual BR1F SpanishJosé SalazarAún no hay calificaciones
- ENDocumento2 páginasENAnonymous UCKYGHcLAún no hay calificaciones
- PGD798 Installation Guide SPANISH - 20211205 WebDocumento31 páginasPGD798 Installation Guide SPANISH - 20211205 WebAdán VSAún no hay calificaciones
- Dokumen - Tips Armado d12cDocumento9 páginasDokumen - Tips Armado d12cعبدالغني القباطيAún no hay calificaciones
- ManualDocumento2 páginasManualivana balziAún no hay calificaciones
- Manual de Instalacion RollerDocumento3 páginasManual de Instalacion RollerAlfredo Ponte100% (1)
- FA EstandarDocumento9 páginasFA EstandarJuan Carlos RinconAún no hay calificaciones
- Montaje de Tubos de HincaDocumento2 páginasMontaje de Tubos de Hincaaev65Aún no hay calificaciones
- Estudio 2 90X190 CM 30-03-17Documento6 páginasEstudio 2 90X190 CM 30-03-17juanAún no hay calificaciones
- Doblaje de Tuberia Emt InfDocumento2 páginasDoblaje de Tuberia Emt InfVanessa HurtadoAún no hay calificaciones
- Instructivo Montaje de Torre BrioDocumento13 páginasInstructivo Montaje de Torre BrioYuri BurgosAún no hay calificaciones
- 03 Curso ENC 6150 Digicel ESVDocumento42 páginas03 Curso ENC 6150 Digicel ESVAlexAún no hay calificaciones
- Manual de Instalacion ReclinersDocumento15 páginasManual de Instalacion Reclinerscisnerosarian123Aún no hay calificaciones
- Ciclo Cateye CC-PA100W HP ES v2-1Documento13 páginasCiclo Cateye CC-PA100W HP ES v2-1HernanAún no hay calificaciones
- Mi PDFDocumento11 páginasMi PDFBrayan Carranza hoyosAún no hay calificaciones
- Instruccion Montaje de Andamios TubularesDocumento7 páginasInstruccion Montaje de Andamios TubularesMario RAún no hay calificaciones
- Mesas 3DDocumento17 páginasMesas 3DSAMANTHA MICAELLA SANCHEZ RUEDAAún no hay calificaciones
- Guia de Inicio Rapido Magna 2 230Documento4 páginasGuia de Inicio Rapido Magna 2 230Gustavo SansoneAún no hay calificaciones
- Mod.025 Torre 2.00 M X 2.00 M H 8.41 + 1.00 M Baranda (Todo Plataformado)Documento1 páginaMod.025 Torre 2.00 M X 2.00 M H 8.41 + 1.00 M Baranda (Todo Plataformado)Seida Rojas CabelloAún no hay calificaciones
- Manuales de Instalación PDFDocumento4 páginasManuales de Instalación PDFPitufo BarronAún no hay calificaciones
- Om 029-03 SP TisDocumento6 páginasOm 029-03 SP TistodocatsolucionesAún no hay calificaciones
- Instructivo Cerraduras EM YALE ElectroDocumento2 páginasInstructivo Cerraduras EM YALE ElectroWil100% (2)
- Doblaje de Tuberia Emt InfDocumento2 páginasDoblaje de Tuberia Emt InfVanessa HurtadoAún no hay calificaciones
- Op-Ins-Oo1 Instructivo para La Ejecucion de Empalme Vulcanizado en Correa TextilDocumento9 páginasOp-Ins-Oo1 Instructivo para La Ejecucion de Empalme Vulcanizado en Correa TextilJoseline Amalia Calle AlvarezAún no hay calificaciones
- Manual 89001498 Electricidad de Mantenimiento PDFDocumento339 páginasManual 89001498 Electricidad de Mantenimiento PDFbooz100% (1)
- Ficha Arnes de SeguridadDocumento2 páginasFicha Arnes de SeguridadnayibeAún no hay calificaciones
- Lijadora Virutex LB31E - 3200100 - 3196128Documento20 páginasLijadora Virutex LB31E - 3200100 - 3196128agapeAún no hay calificaciones
- DM-FD (Spanish) Manual Del Distribuidor. Desviador FD-9000 FD-6800 FD-5800Documento18 páginasDM-FD (Spanish) Manual Del Distribuidor. Desviador FD-9000 FD-6800 FD-5800Javier Jimenez PerezAún no hay calificaciones
- CC-RS100W HP ES v1Documento15 páginasCC-RS100W HP ES v1JoséAún no hay calificaciones
- Multiply Splice Instr ESDocumento20 páginasMultiply Splice Instr ESCésar Augusto correa PérezAún no hay calificaciones
- Manual de Instrucciones Acoples de Cadena DODGEDocumento2 páginasManual de Instrucciones Acoples de Cadena DODGEZabellzaroch GerdenheimAún no hay calificaciones
- I-003-PS04 - Instalacion de Puertas de 1 Hoja Con Marco MC3 o REVER Con Garras o Tornillos PDFDocumento2 páginasI-003-PS04 - Instalacion de Puertas de 1 Hoja Con Marco MC3 o REVER Con Garras o Tornillos PDFnsmlmapcAún no hay calificaciones
- Case Adt 02-09SDocumento8 páginasCase Adt 02-09SFRANCISCO GARCIAAún no hay calificaciones
- Ejercicios Piezas Soldadas y Chapa MetalicaDocumento24 páginasEjercicios Piezas Soldadas y Chapa MetalicaWiñay Qhantati Ururi Base CuscoAún no hay calificaciones
- Trabajos de AjusteDocumento16 páginasTrabajos de AjusteDaniel SaenzAún no hay calificaciones
- Manual de Piso DeckDocumento7 páginasManual de Piso DeckIvan FlorentinoAún no hay calificaciones
- 26LF15R4Documento5 páginas26LF15R4Mr. Gonza M.Aún no hay calificaciones
- Montaje Del Motor Nota: OIL OILDocumento17 páginasMontaje Del Motor Nota: OIL OILMaxs Jhoel Sagastegui AguilarAún no hay calificaciones
- Rigidos de Bolas SNRDocumento4 páginasRigidos de Bolas SNRmartinez martinezAún no hay calificaciones
- Bicon SI Catalog ESDocumento22 páginasBicon SI Catalog ESVargas BlankaAún no hay calificaciones
- Manual TermotanqueDocumento4 páginasManual TermotanqueElena Hall100% (1)
- Manual TermotanqueDocumento4 páginasManual TermotanqueJuan AmitranoAún no hay calificaciones
- Guia MONT RobotsDocumento15 páginasGuia MONT RobotsRaquel Blasco VargasAún no hay calificaciones
- Cous Cous A La MexicanaDocumento1 páginaCous Cous A La MexicanajuanAún no hay calificaciones
- Codigo de Cap.Documento1 páginaCodigo de Cap.juanAún no hay calificaciones
- Atún Dolores A La Veracruzana PDFDocumento2 páginasAtún Dolores A La Veracruzana PDFjuanAún no hay calificaciones
- Camarones A La DiablaDocumento2 páginasCamarones A La DiablajuanAún no hay calificaciones
- Chicharrón en Salsa VerdeDocumento2 páginasChicharrón en Salsa VerdejuanAún no hay calificaciones
- Aguachile de CamarónDocumento1 páginaAguachile de CamarónjuanAún no hay calificaciones
- Elevador de Voltaje Utilizando MyRIODocumento39 páginasElevador de Voltaje Utilizando MyRIOjuanAún no hay calificaciones
- Agua de Manzana Con FresaDocumento2 páginasAgua de Manzana Con FresajuanAún no hay calificaciones
- Agua de HorchataDocumento2 páginasAgua de HorchatajuanAún no hay calificaciones
- Conmutadores DiscapacidadDocumento111 páginasConmutadores DiscapacidadjuanAún no hay calificaciones
- Prac. Ing. Electronica (Todo)Documento72 páginasPrac. Ing. Electronica (Todo)juan100% (1)
- Canales Rejilla UlmaDocumento12 páginasCanales Rejilla Ulmaexcer997Aún no hay calificaciones
- TORQUE TORNILLOS DE MOTOR Manual de Operación y Mantenimiento Del QSB4.5 y QSB6.7Documento5 páginasTORQUE TORNILLOS DE MOTOR Manual de Operación y Mantenimiento Del QSB4.5 y QSB6.7tinas-09Aún no hay calificaciones
- V267 - Marco Tapa Bisagrado Clase D400-1Documento2 páginasV267 - Marco Tapa Bisagrado Clase D400-1Diego CoronadoAún no hay calificaciones
- Pernos AcmeDocumento7 páginasPernos AcmejavierbuitronAún no hay calificaciones
- Planos E22-2498Documento14 páginasPlanos E22-2498DavidBenaventeAún no hay calificaciones
- FT Acople Ultralink Amplio Rango Multimaterial PFA 16 PAMDocumento5 páginasFT Acople Ultralink Amplio Rango Multimaterial PFA 16 PAMSaiu Miyakawa100% (1)
- Plano As Built 180601 Hoja 1 de 2Documento1 páginaPlano As Built 180601 Hoja 1 de 2edinson castrilloAún no hay calificaciones
- Catalogo TubosDocumento129 páginasCatalogo TubosOskar Jvr GrcsAún no hay calificaciones
- Características Técnicas Del Torno ParaleloDocumento5 páginasCaracterísticas Técnicas Del Torno ParaleloKatty Pinto100% (1)
- Estudio de Mercado Precios de Mat. 2009Documento6 páginasEstudio de Mercado Precios de Mat. 2009Edinson Milton Gaona BarbozaAún no hay calificaciones
- Presu Eq HidrualicoDocumento4 páginasPresu Eq HidrualicoecustodionajarroAún no hay calificaciones
- Catalogo de Lineales IsbDocumento191 páginasCatalogo de Lineales IsbJHON FERNEY BOHORQUEZ SALDARRIAGAAún no hay calificaciones
- Trabajo Final de Fundamentos de La MecanicaDocumento23 páginasTrabajo Final de Fundamentos de La MecanicaJhon FloresAún no hay calificaciones
- Calculos CargaderosDocumento7 páginasCalculos CargaderosSergio Alejandro Jurado LugoAún no hay calificaciones
- Uniones RemachadasDocumento26 páginasUniones RemachadasMEIER JOSUE QUILLAHUAMAN HUAMANAún no hay calificaciones
- Pedido BJR SetiembreDocumento4 páginasPedido BJR SetiembreJsmes AriasAún no hay calificaciones
- Elementos RoscadosDocumento29 páginasElementos RoscadosEsteban JpAún no hay calificaciones
- Bomba T-9essDocumento1 páginaBomba T-9esshector aguilarAún no hay calificaciones
- RepuestosDocumento6 páginasRepuestosedgar ricoAún no hay calificaciones
- 01 - Cat - Tec - Tornillos HexagonalesDocumento23 páginas01 - Cat - Tec - Tornillos Hexagonalesreman partsAún no hay calificaciones
- Expa Expn Expf FichaDocumento7 páginasExpa Expn Expf Fichacampana02Aún no hay calificaciones
- INEN Rosca Metrica ISO Seleccion de Diametros y PAsos para TornilleriaDocumento4 páginasINEN Rosca Metrica ISO Seleccion de Diametros y PAsos para TornilleriaJuan CarlosAún no hay calificaciones
- AceroDocumento6 páginasAceroYerson OlmerAún no hay calificaciones
- Catalogo de Soportes y Sujecion - Industria Basica Arg PDFDocumento8 páginasCatalogo de Soportes y Sujecion - Industria Basica Arg PDFJUANAún no hay calificaciones
- Control de Inventario de StockDocumento7 páginasControl de Inventario de StockCarlos LevermanAún no hay calificaciones
- (Ex) Une-En Iso 898-1 2000Documento4 páginas(Ex) Une-En Iso 898-1 2000mayra contrerasAún no hay calificaciones
- TornillosDocumento20 páginasTornillosJoseph ElrubioAún no hay calificaciones
- Resolucion Sie-029-2015-Memi - Regl. Diseño y Construccion Redes Dist. Aereas - II-221-491Documento271 páginasResolucion Sie-029-2015-Memi - Regl. Diseño y Construccion Redes Dist. Aereas - II-221-491Luis Miguel FloresAún no hay calificaciones
- Tornillos Alta Resistencia en TensiónDocumento4 páginasTornillos Alta Resistencia en TensióncezapeAún no hay calificaciones
- Dynafit5 PDFDocumento11 páginasDynafit5 PDFPeroAún no hay calificaciones
- Mecánica para ingenieros: cinemática: Apuntes de preparación de clasesDe EverandMecánica para ingenieros: cinemática: Apuntes de preparación de clasesAún no hay calificaciones
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- Casos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSDe EverandCasos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- El arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]De EverandEl arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]Calificación: 3 de 5 estrellas3/5 (2)
- UF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasDe EverandUF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasAún no hay calificaciones
- MF1165_3 - Instalaciones de ventilación-ExtracciónDe EverandMF1165_3 - Instalaciones de ventilación-ExtracciónAún no hay calificaciones
- UF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosDe EverandUF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosAún no hay calificaciones
- UF0009 - Mantenimiento, preparación y manejo de tractoresDe EverandUF0009 - Mantenimiento, preparación y manejo de tractoresAún no hay calificaciones
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- UF1026 - Caracterización de procesos e instalaciones frigoríficasDe EverandUF1026 - Caracterización de procesos e instalaciones frigoríficasCalificación: 4 de 5 estrellas4/5 (1)
- UF0902 - Caracterización de instalaciones de climatizaciónDe EverandUF0902 - Caracterización de instalaciones de climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- Manual de combustibles alternativos y tecnología automotrizDe EverandManual de combustibles alternativos y tecnología automotrizCalificación: 5 de 5 estrellas5/5 (6)
- UF1213 - Técnicas de mecanizado y metrologíaDe EverandUF1213 - Técnicas de mecanizado y metrologíaCalificación: 4 de 5 estrellas4/5 (5)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- Diseño de vigas y muros en mamposteria reforzadaDe EverandDiseño de vigas y muros en mamposteria reforzadaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Mucho más que una Cruz: Imágenes de la Salvación para diversos contextosDe EverandMucho más que una Cruz: Imágenes de la Salvación para diversos contextosCalificación: 3.5 de 5 estrellas3.5/5 (3)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- MF1805_2 - Manejo y mantenimiento de equipos de preparación del sueloDe EverandMF1805_2 - Manejo y mantenimiento de equipos de preparación del sueloAún no hay calificaciones











































































































![El arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]](https://imgv2-1-f.scribdassets.com/img/word_document/436374717/149x198/1f8b752e12/1699199921?v=1)