0% encontró este documento útil (0 votos)
460 vistas22 páginasFiltros Chebyshev
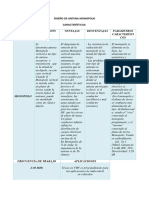
El documento describe los filtros de Chebyshev, los cuales permiten una caída más rápida en la respuesta de frecuencia a costa de permitir rizado. Existen dos tipos: Tipo I con rizado en la banda pasante y Tipo II con rizado en la banda detenida. Estos filtros se caracterizan por el tipo de respuesta, la frecuencia de corte, el orden y el rizado permitido.
Cargado por
Gera VázquezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
460 vistas22 páginasFiltros Chebyshev
El documento describe los filtros de Chebyshev, los cuales permiten una caída más rápida en la respuesta de frecuencia a costa de permitir rizado. Existen dos tipos: Tipo I con rizado en la banda pasante y Tipo II con rizado en la banda detenida. Estos filtros se caracterizan por el tipo de respuesta, la frecuencia de corte, el orden y el rizado permitido.
Cargado por
Gera VázquezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd