También podría gustarte
- Problema - Vagoneta. Se Pretende Automatizar El Sistema de Transporte de Material de La Figura - Válvula de Carga V1Documento13 páginasProblema - Vagoneta. Se Pretende Automatizar El Sistema de Transporte de Material de La Figura - Válvula de Carga V1Henry HZ100% (1)
- Banda TransportadoraDocumento7 páginasBanda TransportadoraDarth VaderAún no hay calificaciones
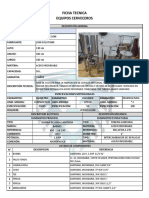
- Ficha Tecnica Equipos CervecerosDocumento2 páginasFicha Tecnica Equipos CervecerosElena Patricia Prieto RodriguezAún no hay calificaciones
- Mezclado RaDocumento13 páginasMezclado Rarufinius100% (2)
- 1 Problema Vagoneta 2020Documento2 páginas1 Problema Vagoneta 2020JhoelAún no hay calificaciones
- EXA2G3OI PdfcreatorDocumento38 páginasEXA2G3OI PdfcreatorTomas Sanchez TronoAún no hay calificaciones
- Ejercicios Propuestos PLCDocumento12 páginasEjercicios Propuestos PLCLenin JiménezAún no hay calificaciones
- Problemas Resueltos ContactosDocumento13 páginasProblemas Resueltos ContactosFredmaryLopezAún no hay calificaciones
- Solucionplc5ladder 7 13Documento7 páginasSolucionplc5ladder 7 13Juan Manuel Tachi Tabares100% (1)
- Ejercicios Resueltos GrafcetDocumento13 páginasEjercicios Resueltos GrafcetCarlosAún no hay calificaciones
- Load UnloadDocumento2 páginasLoad UnloadJuan De la cruzAún no hay calificaciones
- Motor Con Normalizado y EscaladoDocumento2 páginasMotor Con Normalizado y EscaladoJacobo Suarez RodriguezAún no hay calificaciones
- Práctica 1 AutomatizaciónDocumento16 páginasPráctica 1 AutomatizaciónJuanjo Lopez GarciaAún no hay calificaciones
- Ejercicio MezcladoraDocumento13 páginasEjercicio MezcladoraDiego Martinez TrivesAún no hay calificaciones
- Parcial 1Documento2 páginasParcial 1Oscar ZorrillaAún no hay calificaciones
- M006 UD03 EFb1 SOLUCIONDocumento7 páginasM006 UD03 EFb1 SOLUCIONGerardo Lopez0% (2)
- DosDocumento6 páginasDosMariaAún no hay calificaciones
- Borrador Practica AscendorDocumento3 páginasBorrador Practica AscendorSu ErnosAún no hay calificaciones
- Problema MezcladoraDocumento13 páginasProblema MezcladoraAndres TunarozaAún no hay calificaciones
- Problema: Mezcladora: VA VB VA VBDocumento13 páginasProblema: Mezcladora: VA VB VA VBJoan Steven SanchezAún no hay calificaciones
- Somachine Basic Manual 3 PracticaDocumento16 páginasSomachine Basic Manual 3 PracticaGuillermoAlejandroCajal100% (1)
- Manual Volkswagen Sedan Fuel Injection2Documento4 páginasManual Volkswagen Sedan Fuel Injection2Ing. Gabriel Ortiz100% (3)
- 02 CVFDocumento11 páginas02 CVFfredwar.bensonAún no hay calificaciones
- INEL - Programa Integral de Operacion y Control de Sist de PotenciaDocumento9 páginasINEL - Programa Integral de Operacion y Control de Sist de PotenciaSebas CorvalánAún no hay calificaciones
- Asignacion 10% Segundo CorteDocumento11 páginasAsignacion 10% Segundo CorteRicardo Campos LandaetaAún no hay calificaciones
- IC-1400. FOC .Tema 2. Modelo de Computación AbstractoDocumento42 páginasIC-1400. FOC .Tema 2. Modelo de Computación AbstractoPablo PérezAún no hay calificaciones
- 1programa Principal Ejercicio 3.1 SolucionDocumento4 páginas1programa Principal Ejercicio 3.1 Solucionpablo largoAún no hay calificaciones
- Informe 2Documento8 páginasInforme 2Simon HernandezAún no hay calificaciones
- Es 2015 2Documento3 páginasEs 2015 2Ivett MartellAún no hay calificaciones
- Cuadro de Diagnóstico de Averías para El Sistema: Valor de Referencia de Consult-Ii en El Modo de Monitor de DatosDocumento4 páginasCuadro de Diagnóstico de Averías para El Sistema: Valor de Referencia de Consult-Ii en El Modo de Monitor de DatosJuan Carlos GlauserAún no hay calificaciones
- Informe 7Documento8 páginasInforme 7Simon HernandezAún no hay calificaciones
- Informe 8Documento10 páginasInforme 8Simon HernandezAún no hay calificaciones
- Redes de Petri - Problemas - II PDFDocumento15 páginasRedes de Petri - Problemas - II PDFalejandro balagueraAún no hay calificaciones
- Control MotorDocumento5 páginasControl MotorJhonathanAún no hay calificaciones
- Practica - 4.3 - CI / PLC - 1 (CPU 1214C DC/DC/DC) / Bloques de ProgramaDocumento3 páginasPractica - 4.3 - CI / PLC - 1 (CPU 1214C DC/DC/DC) / Bloques de ProgramaOct4v4riumAún no hay calificaciones
- 4 - Multitoken Excos Enonce CorrectionDocumento22 páginas4 - Multitoken Excos Enonce CorrectionLuc AusterAún no hay calificaciones
- Examen Parcial 2014-IDocumento3 páginasExamen Parcial 2014-IBrandon Rengifo ReynagaAún no hay calificaciones
- Ejemplos SFCDocumento5 páginasEjemplos SFCmwueaqpAún no hay calificaciones
- 2 FlancosDocumento6 páginas2 FlancosSalvaAún no hay calificaciones
- PLC Esclavo Control de Nivel de TanqueDocumento2 páginasPLC Esclavo Control de Nivel de TanqueGonzales NestorAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- CATALOGODocumento24 páginasCATALOGOBenigna Flores fernandezAún no hay calificaciones
- Clases de PoliedrosDocumento30 páginasClases de PoliedrosjojlllAún no hay calificaciones
- Electronica ExperimentalDocumento15 páginasElectronica ExperimentalErika ChavezAún no hay calificaciones
- 2 parcialPTOS 2020-1-8B PDFDocumento2 páginas2 parcialPTOS 2020-1-8B PDFMAURICIO GONZALEZAún no hay calificaciones
- 31-9095 SP Pages 26 To 48 Edison WasherDocumento23 páginas31-9095 SP Pages 26 To 48 Edison WasherCesar Calderon GrAún no hay calificaciones
- 1.3 Protección de GeneradoresDocumento36 páginas1.3 Protección de GeneradoresAlexander David Tipan SanchezAún no hay calificaciones
- 012 Pets Izaje de Carga Con Camion Grua PDFDocumento3 páginas012 Pets Izaje de Carga Con Camion Grua PDFjoseph elsen campos canchariAún no hay calificaciones
- Resumen de Cimentaciones EspecialesDocumento4 páginasResumen de Cimentaciones EspecialesKlisman Roque tincoAún no hay calificaciones
- Varilla Cambio 722.8 Mercedes Clase BDocumento2 páginasVarilla Cambio 722.8 Mercedes Clase Babelmonte_geotecniaAún no hay calificaciones
- Memoria I.E. MultifamiliarDocumento12 páginasMemoria I.E. MultifamiliarNicolas B. Ynca SollerAún no hay calificaciones
- Informe Realizado en Su Actualidad 2010Documento4 páginasInforme Realizado en Su Actualidad 2010VictorFlorezVictoriaAún no hay calificaciones
- Resistencias BisDocumento7 páginasResistencias Bisjesus cepeda garciaAún no hay calificaciones
- Colocacion de Cerraduras Puertas de ChapaDocumento2 páginasColocacion de Cerraduras Puertas de ChapaBoozfuentesAún no hay calificaciones
- CINCO Reglas de OroDocumento11 páginasCINCO Reglas de OroVane Gomez0% (1)
- Corte 2 (Tarea 2) Mapa ConceptualDocumento7 páginasCorte 2 (Tarea 2) Mapa ConceptualJesús Miguel VSAún no hay calificaciones
- Movimont PDFDocumento88 páginasMovimont PDFAlejandro Armendáriz PérezAún no hay calificaciones
- Informe Laboratorio 1 - Circuitos Electricos 1Documento4 páginasInforme Laboratorio 1 - Circuitos Electricos 1Johan BecerraAún no hay calificaciones
- Topografia Basurero GuayabalDocumento9 páginasTopografia Basurero GuayabalCamilo Sosa CubillosAún no hay calificaciones
- Baños Hospital PúblicoDocumento1 páginaBaños Hospital Públicodf8ydhbnzbAún no hay calificaciones
- Certificado 1401Documento2 páginasCertificado 1401Mario GonzalezAún no hay calificaciones
- Proforma de ViviendaDocumento2 páginasProforma de ViviendaLuis Raúl Rodriguez DávalosAún no hay calificaciones
- Resumen de Rendimientos ObrasDocumento1 páginaResumen de Rendimientos ObrasGuillermo GarciaAún no hay calificaciones
- Pregrado Presencial Fase dDocumento195 páginasPregrado Presencial Fase dspenserwill54Aún no hay calificaciones
- Montaje de Un Tablero Electrico Domiciliario Con Circuitos IDocumento3 páginasMontaje de Un Tablero Electrico Domiciliario Con Circuitos IꓟᴄRḼṎṢ ẎẺịṆṦyAún no hay calificaciones
- Informe Tecnico - OkDocumento9 páginasInforme Tecnico - OkJuan Arias AlbercaAún no hay calificaciones
- Grupo 2 Tiempo de Encofrado y Desencofrado ElementosDocumento10 páginasGrupo 2 Tiempo de Encofrado y Desencofrado ElementosJair CaballeroAún no hay calificaciones
- Tramitología Construcción Desde CeroDocumento32 páginasTramitología Construcción Desde CeroFiorella RomeroAún no hay calificaciones
- Ejercitacion 1 Electricidad 10 de AgostoDocumento3 páginasEjercitacion 1 Electricidad 10 de AgostoDanilo Pinto0% (1)
- PRL Actividad 35 RosaDocumento5 páginasPRL Actividad 35 RosaRaúl Primitivo Ortiz GómezAún no hay calificaciones