También podría gustarte
- Simulación y Evaluación Del Desempeño de Dos Variantes de TCPDocumento27 páginasSimulación y Evaluación Del Desempeño de Dos Variantes de TCPluquitas214Aún no hay calificaciones
- Simulación y Evaluación Del Desempeño de Dos Variantes de Tcp-Por Defecto y Tcp-Linux en NS-2Documento27 páginasSimulación y Evaluación Del Desempeño de Dos Variantes de Tcp-Por Defecto y Tcp-Linux en NS-2luquitas214100% (2)
- Lab S2Documento7 páginasLab S2luquitas214Aún no hay calificaciones
- Guias RNA 02Documento10 páginasGuias RNA 02luquitas214Aún no hay calificaciones
- Lab 6Documento5 páginasLab 6luquitas214Aún no hay calificaciones
- Lab S3 RNADocumento2 páginasLab S3 RNAluquitas214Aún no hay calificaciones
- ParafinaDocumento3 páginasParafinakurtAún no hay calificaciones
- BF Skinner: Pionero del ConductismoDocumento4 páginasBF Skinner: Pionero del ConductismoCarlitos GuerraAún no hay calificaciones
- Glosario de Productos AcadémicosDocumento10 páginasGlosario de Productos AcadémicosAnnahi BcAún no hay calificaciones
- Informe Curso Lapidación en Piedra - Carlos OrosteguiDocumento15 páginasInforme Curso Lapidación en Piedra - Carlos OrosteguiJaviera CarvajalAún no hay calificaciones
- Eca en El Cultivo de CacaoDocumento46 páginasEca en El Cultivo de Cacaoelmer fretel100% (4)
- Experimento de Luis PasteurDocumento3 páginasExperimento de Luis PasteurdianaAún no hay calificaciones
- Manual de Catalogación, Clasificacion - NazdiaDocumento66 páginasManual de Catalogación, Clasificacion - NazdiaNazdia Yadzia Herrera MendezAún no hay calificaciones
- Instalaciones ElectricasDocumento25 páginasInstalaciones ElectricasJuan Edson Ramos GanozaAún no hay calificaciones
- Actividades 1° Semana 31Documento12 páginasActividades 1° Semana 31Antonio Garcia CastroAún no hay calificaciones
- Encuesta para Construcción de MensajeDocumento28 páginasEncuesta para Construcción de MensajeAlfonso RamosAún no hay calificaciones
- Cartel CientificoDocumento1 páginaCartel CientificoTéllez Nolasco Laisha JohanaAún no hay calificaciones
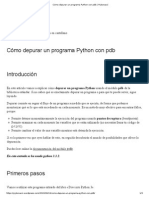
- Cómo Depurar Un Programa Python Con PDB - PybonacciDocumento9 páginasCómo Depurar Un Programa Python Con PDB - PybonacciAndrea VNAún no hay calificaciones
- Negociación y resolución de conflictosDocumento40 páginasNegociación y resolución de conflictosMatias OrellanaAún no hay calificaciones
- Método de Jerarquización para La Evaluación de CargosDocumento37 páginasMétodo de Jerarquización para La Evaluación de CargosLaly BravoAún no hay calificaciones
- Estudio de Caso AA3Documento3 páginasEstudio de Caso AA3Jennifer PazAún no hay calificaciones
- Examen Final Metodologia UniversaitariaDocumento6 páginasExamen Final Metodologia Universaitariachristian0% (1)
- Mini Excavadora Kubota KX121 3 Alpha SPDocumento4 páginasMini Excavadora Kubota KX121 3 Alpha SPramon hidalgoAún no hay calificaciones
- Mercadona AnalisisDocumento13 páginasMercadona Analisisicastrou50% (2)
- Tablas de WordDocumento18 páginasTablas de WordUzielCarpioVillanuevaAún no hay calificaciones
- GUIA NO. 2 Ejercicios de TEMPERATURA Y CALORIMETRIADocumento3 páginasGUIA NO. 2 Ejercicios de TEMPERATURA Y CALORIMETRIArosy hernandezAún no hay calificaciones
- Carta PsicrometricaDocumento29 páginasCarta PsicrometricaJessy MarínAún no hay calificaciones
- Anorexia Nerviosa - Reflexiones Psicoanalíticas Sobre La Sexualidad Femenina y La Figura Del Padre enDocumento8 páginasAnorexia Nerviosa - Reflexiones Psicoanalíticas Sobre La Sexualidad Femenina y La Figura Del Padre enCristian OrellanaAún no hay calificaciones
- La utopía del blanqueamiento y la lucha por el mestizajeDocumento38 páginasLa utopía del blanqueamiento y la lucha por el mestizajeJuan CamiloAún no hay calificaciones
- Manual Mantenimiento Mod VDocumento50 páginasManual Mantenimiento Mod Vmirian noa mendozaAún no hay calificaciones
- EPE II Sector BasuraDocumento69 páginasEPE II Sector BasuraFermat BetancourtAún no hay calificaciones
- Registro Invima - Doopler - MindrayDocumento2 páginasRegistro Invima - Doopler - MindrayANDRES CORTESAún no hay calificaciones
- EXPLORACIONDocumento4 páginasEXPLORACIONYordy QuecañoAún no hay calificaciones
- MotricidadDocumento3 páginasMotricidadFernanda DíazAún no hay calificaciones
- Fórmulas para Cuantificar La Compensación EconómicaDocumento14 páginasFórmulas para Cuantificar La Compensación EconómicaHelenAvalosAún no hay calificaciones
- Resetea tu mente. Descubre de lo que eres capazDe EverandResetea tu mente. Descubre de lo que eres capazCalificación: 5 de 5 estrellas5/5 (196)
- Resumen de El Sutil Arte de que te Importe un Carajo, de Mark MansonDe EverandResumen de El Sutil Arte de que te Importe un Carajo, de Mark MansonCalificación: 4.5 de 5 estrellas4.5/5 (15)
- No desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaDe EverandNo desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaCalificación: 4.5 de 5 estrellas4.5/5 (11)
- El poder del optimismo: Herramientas para vivir de forma más positivaDe EverandEl poder del optimismo: Herramientas para vivir de forma más positivaCalificación: 4.5 de 5 estrellas4.5/5 (15)
- Maneja tus emociones: Curso intensivo de mindfulness y regulación emocionalDe EverandManeja tus emociones: Curso intensivo de mindfulness y regulación emocionalCalificación: 4.5 de 5 estrellas4.5/5 (140)
- Tu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaDe EverandTu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaCalificación: 5 de 5 estrellas5/5 (2)
- Ansiosos por nada: Menos preocupación, más pazDe EverandAnsiosos por nada: Menos preocupación, más pazCalificación: 4.5 de 5 estrellas4.5/5 (582)
- Disciplina con amor para adolescentes (Discipline With Love for Adolescents): Guía para llevarte bien con tu adolescente (A Guide for Getting Along Well With Your Adolescent)De EverandDisciplina con amor para adolescentes (Discipline With Love for Adolescents): Guía para llevarte bien con tu adolescente (A Guide for Getting Along Well With Your Adolescent)Calificación: 5 de 5 estrellas5/5 (10)
- Aprende cómo vencer tus miedos de forma eficaz : consigue todos tus objetivos mediante la superación personalDe EverandAprende cómo vencer tus miedos de forma eficaz : consigue todos tus objetivos mediante la superación personalCalificación: 5 de 5 estrellas5/5 (22)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Terapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSDe EverandTerapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSCalificación: 5 de 5 estrellas5/5 (1)
- Supera tus preocupaciones: Cómo entender y manejar la ansiedadDe EverandSupera tus preocupaciones: Cómo entender y manejar la ansiedadCalificación: 4.5 de 5 estrellas4.5/5 (113)
- Te odio - no me abandones: Comprender el trastorno límite de personalidadDe EverandTe odio - no me abandones: Comprender el trastorno límite de personalidadCalificación: 5 de 5 estrellas5/5 (3)
- Pensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.De EverandPensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.Calificación: 4.5 de 5 estrellas4.5/5 (33)