También podría gustarte
- Nihon Kohden Cardiofax 9620L 9620M 9620N 9620P 9620S 9620T 9620U ElectrocardiografoDocumento135 páginasNihon Kohden Cardiofax 9620L 9620M 9620N 9620P 9620S 9620T 9620U Electrocardiografomiguel100% (1)
- Nom 001 Sede 2005Documento815 páginasNom 001 Sede 2005api-373013288% (8)
- Ejemplos FallasDocumento0 páginasEjemplos FallasAlejandro Vera GilAún no hay calificaciones
- 2100 sr007 - Es eDocumento30 páginas2100 sr007 - Es eWanessa SuárezAún no hay calificaciones
- Filtro de Tareas Contenidas Entre Las Tareas 70 y 90Documento6 páginasFiltro de Tareas Contenidas Entre Las Tareas 70 y 90joneth1g.1mostaceroAún no hay calificaciones
- REPORTE DE CARGAS DE TRABAJO Vs COSTO SEMANAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSDocumento1 páginaREPORTE DE CARGAS DE TRABAJO Vs COSTO SEMANAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSjoneth1g.1mostaceroAún no hay calificaciones
- Reporte de Diagrama de Gantt. Proy. Viv. UnifamiliarDocumento1 páginaReporte de Diagrama de Gantt. Proy. Viv. Unifamiliarjoneth1g.1mostaceroAún no hay calificaciones
- Proyecto Vivienda Unifamiliar - Definiendo y Asignando RecursosDocumento7 páginasProyecto Vivienda Unifamiliar - Definiendo y Asignando Recursosjoneth1g.1mostaceroAún no hay calificaciones
- ANÁLISIS DE COSTOS Vs TRABAJOS DE LAS PARTIDAS Y RECURSOS Vs EN EL TIEMPO - DIARIO - SEMANAL - QUINCENAL - MENSUALDocumento16 páginasANÁLISIS DE COSTOS Vs TRABAJOS DE LAS PARTIDAS Y RECURSOS Vs EN EL TIEMPO - DIARIO - SEMANAL - QUINCENAL - MENSUALjoneth1g.1mostaceroAún no hay calificaciones
- Reporte de Tabla de Tasas de Costos de Los Recursos para El Proyecto de Vivienda UnifilarDocumento1 páginaReporte de Tabla de Tasas de Costos de Los Recursos para El Proyecto de Vivienda Unifilarjoneth1g.1mostaceroAún no hay calificaciones
- REPORTE DE CARGAS DE TRABAJO Vs COSTO MENSUAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSDocumento1 páginaREPORTE DE CARGAS DE TRABAJO Vs COSTO MENSUAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSjoneth1g.1mostaceroAún no hay calificaciones
- PESOSDocumento4 páginasPESOSjoneth1g.1mostaceroAún no hay calificaciones
- Reporte de Recursos para Proyecto de Vivienda UnifamiliarDocumento1 páginaReporte de Recursos para Proyecto de Vivienda Unifamiliarjoneth1g.1mostaceroAún no hay calificaciones
- REPORTE DE CARGAS DE TRABAJO Vs COSTO QUINCENAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSDocumento1 páginaREPORTE DE CARGAS DE TRABAJO Vs COSTO QUINCENAL DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSjoneth1g.1mostaceroAún no hay calificaciones
- Brochure AutoCAD 3D - 2022Documento1 páginaBrochure AutoCAD 3D - 2022joneth1g.1mostaceroAún no hay calificaciones
- Semana 6 - La CircunferenciaDocumento38 páginasSemana 6 - La Circunferenciajoneth1g.1mostaceroAún no hay calificaciones
- REPORTE DE CARGAS DE TRABAJO Vs COSTO DIARIO DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSDocumento4 páginasREPORTE DE CARGAS DE TRABAJO Vs COSTO DIARIO DE TODOS LOS RECURSOS DESDE LA VISTA USO DE RECURSOSjoneth1g.1mostaceroAún no hay calificaciones
- 16.30 La Prensa Troqueladora Del Problema 16-29 Necesita Un Volante de Inercia para ServicioDocumento2 páginas16.30 La Prensa Troqueladora Del Problema 16-29 Necesita Un Volante de Inercia para Serviciojoneth1g.1mostaceroAún no hay calificaciones
- Semana 5 - Linea RectaDocumento17 páginasSemana 5 - Linea Rectajoneth1g.1mostaceroAún no hay calificaciones
- Solución: 6 2 6+ 6 6 18 in 50000 18 2777,8 LB/ 5000 10 500lbDocumento1 páginaSolución: 6 2 6+ 6 6 18 in 50000 18 2777,8 LB/ 5000 10 500lbjoneth1g.1mostaceroAún no hay calificaciones
- Solución: 6 2 6+ 6 6 18 in 50000 18 2777,8 LB/ 5000 10 500lbDocumento1 páginaSolución: 6 2 6+ 6 6 18 in 50000 18 2777,8 LB/ 5000 10 500lbjoneth1g.1mostaceroAún no hay calificaciones
- 2 Pieza A Mecaniza Con CNCDocumento23 páginas2 Pieza A Mecaniza Con CNCjoneth1g.1mostaceroAún no hay calificaciones
- CURRICULUM VITAE ModeloDocumento2 páginasCURRICULUM VITAE Modelojoneth1g.1mostaceroAún no hay calificaciones
- Silabo AlcantaraDocumento9 páginasSilabo Alcantarajoneth1g.1mostaceroAún no hay calificaciones
- CONTROL Y PISO DEL TALLER InformeDocumento15 páginasCONTROL Y PISO DEL TALLER Informejoneth1g.1mostaceroAún no hay calificaciones
- Planeacin y Control de Piso de Taller en La ManufacturaDocumento1 páginaPlaneacin y Control de Piso de Taller en La Manufacturajoneth1g.1mostaceroAún no hay calificaciones
- Inversion de Giro de Motores TrifasicosDocumento8 páginasInversion de Giro de Motores Trifasicosjoneth1g.1mostaceroAún no hay calificaciones
- Soldadura Por FriccionDocumento15 páginasSoldadura Por Friccionjoneth1g.1mostaceroAún no hay calificaciones
- SEMICONDUCTORES Tema 1Documento21 páginasSEMICONDUCTORES Tema 1Alex Cristian Saavedra ContrerasAún no hay calificaciones
- Ejercicios, Medidas de OsciloscopioDocumento13 páginasEjercicios, Medidas de OsciloscopioCamilo Torres 159Aún no hay calificaciones
- Servicios de Ingeniería de DetallesDocumento11 páginasServicios de Ingeniería de DetallesCristóbal Berríos100% (1)
- Acta de Instalación Hotspot MQ A 3002 Titire Pl01Documento7 páginasActa de Instalación Hotspot MQ A 3002 Titire Pl01Mauro barrial guillenAún no hay calificaciones
- I7.estudio de Diferentes Configuraciones de Transformadores PDFDocumento17 páginasI7.estudio de Diferentes Configuraciones de Transformadores PDFCarlos Ivan Alvarez TrujilloAún no hay calificaciones
- Arquitectura de Un PLCDocumento4 páginasArquitectura de Un PLCDîon D. OviedoAún no hay calificaciones
- Guía de Inicio Rápido de LBE-5AC-Gen2Documento24 páginasGuía de Inicio Rápido de LBE-5AC-Gen2fabio3055100% (1)
- Informe Revision Equipos Hvac y PlantaDocumento2 páginasInforme Revision Equipos Hvac y PlantaKike VanegasAún no hay calificaciones
- 1-Vista GeneralDocumento10 páginas1-Vista GeneralHector Huenulef Del RioAún no hay calificaciones
- Preinstalaciones Hi Speed II 200 PDFDocumento8 páginasPreinstalaciones Hi Speed II 200 PDFJefferson NinoAún no hay calificaciones
- Conexiones de Varios Receptores en Un Mismo CircuitoDocumento6 páginasConexiones de Varios Receptores en Un Mismo CircuitoGeorge AV100% (1)
- Simulación de Circuito Con DiodosDocumento2 páginasSimulación de Circuito Con DiodosBryan Enrique TorresAún no hay calificaciones
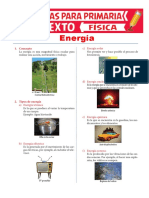
- Energía: 1. ConceptoDocumento2 páginasEnergía: 1. ConceptoKevin PleilAún no hay calificaciones
- Potencia 2-Examen FinalDocumento2 páginasPotencia 2-Examen FinalAdrian Paredez100% (1)
- Informe de Laboratorio Saúl AguilarDocumento10 páginasInforme de Laboratorio Saúl AguilarSaúl AlejandroAún no hay calificaciones
- Diagrama en BlancoDocumento1 páginaDiagrama en BlancoValaKDBAún no hay calificaciones
- Texto Repaso Dinã¡micaDocumento31 páginasTexto Repaso Dinã¡micaMariela KolbAún no hay calificaciones
- Sistemas de Control Automático LinealesDocumento4 páginasSistemas de Control Automático LinealesFrancoAún no hay calificaciones
- P2 - Solución ELDocumento4 páginasP2 - Solución ELYacson Ruiz SanchezAún no hay calificaciones
- Modo de Conduccion ContinuaDocumento12 páginasModo de Conduccion ContinuaJuan Camilo NaranjoAún no hay calificaciones
- Lab 03 (Rectificador de Onda Completa)Documento4 páginasLab 03 (Rectificador de Onda Completa)Horacio PeartAún no hay calificaciones
- TB 4 El Transistor de Efecto de CampoDocumento17 páginasTB 4 El Transistor de Efecto de CampoNiria Camacho MendozaAún no hay calificaciones
- Principio Del GalvanometroDocumento2 páginasPrincipio Del Galvanometrojoseluiseti1744100% (6)
- Tema 1.1.1 Semiconductores HeavyDocumento16 páginasTema 1.1.1 Semiconductores HeavymikemagdalenaAún no hay calificaciones
- Man 1 WsDocumento32 páginasMan 1 WsGabo Cardenas100% (1)