También podría gustarte
- CARATULADocumento1 páginaCARATULAjhonathan ever meneses lopezAún no hay calificaciones
- Sprocket Faja 4 - D38MM BarrenoDocumento1 páginaSprocket Faja 4 - D38MM Barrenojhonathan ever meneses lopezAún no hay calificaciones
- PLANODocumento1 páginaPLANOjhonathan ever meneses lopezAún no hay calificaciones
- Encuesta Fasciola Hepática en El PerúDocumento1 páginaEncuesta Fasciola Hepática en El Perújhonathan ever meneses lopezAún no hay calificaciones
- Función INDICE y CoincidirDocumento4 páginasFunción INDICE y Coincidirjhonathan ever meneses lopezAún no hay calificaciones
- Pag 107-145Documento41 páginasPag 107-145jhonathan ever meneses lopezAún no hay calificaciones
- La Función Indirecto en ExcelDocumento4 páginasLa Función Indirecto en Exceljhonathan ever meneses lopezAún no hay calificaciones
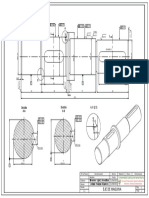
- Eje de MaquinaDocumento1 páginaEje de Maquinajhonathan ever meneses lopezAún no hay calificaciones
- Avance Lab 3 - CyaDocumento7 páginasAvance Lab 3 - Cyajhonathan ever meneses lopezAún no hay calificaciones
- Oral MntoDocumento47 páginasOral Mntojhonathan ever meneses lopezAún no hay calificaciones
- Plan de MantenimientoDocumento20 páginasPlan de Mantenimientojhonathan ever meneses lopezAún no hay calificaciones
- ORALLLLDocumento21 páginasORALLLLjhonathan ever meneses lopezAún no hay calificaciones
- Primer Examen de Jurado de Gestión y Distribución de Plantas IndustrialesDocumento1 páginaPrimer Examen de Jurado de Gestión y Distribución de Plantas Industrialesjhonathan ever meneses lopezAún no hay calificaciones
- Examen 2da FaseDocumento3 páginasExamen 2da Fasejhonathan ever meneses lopezAún no hay calificaciones
- ORALLLLDocumento21 páginasORALLLLjhonathan ever meneses lopezAún no hay calificaciones
- Medio AmbienteDocumento1 páginaMedio Ambientejhonathan ever meneses lopezAún no hay calificaciones
- Refri ProyectoDocumento7 páginasRefri Proyectojhonathan ever meneses lopezAún no hay calificaciones
- Planilla-Intercambiador de CalorDocumento6 páginasPlanilla-Intercambiador de Calorjhonathan ever meneses lopezAún no hay calificaciones
- Medio AmbienteDocumento1 páginaMedio Ambientejhonathan ever meneses lopezAún no hay calificaciones
- Informe 4-TemperaturaDocumento14 páginasInforme 4-Temperaturajhonathan ever meneses lopezAún no hay calificaciones
- INFORME LAB 7 - CyADocumento15 páginasINFORME LAB 7 - CyAjhonathan ever meneses lopezAún no hay calificaciones
- Ingenieria de MantenimientoDocumento12 páginasIngenieria de Mantenimientojhonathan ever meneses lopezAún no hay calificaciones
- Informe 6-RefrigeracionDocumento21 páginasInforme 6-Refrigeracionjhonathan ever meneses lopezAún no hay calificaciones
- Realidad Nacional y CiudadanaDocumento1 páginaRealidad Nacional y Ciudadanajhonathan ever meneses lopezAún no hay calificaciones
- Concentracion de EsfuerzosDocumento6 páginasConcentracion de Esfuerzosjhonathan ever meneses lopezAún no hay calificaciones
- Informe 2-Intercambior de CalorDocumento10 páginasInforme 2-Intercambior de Calorjhonathan ever meneses lopezAún no hay calificaciones
- Informe 3-VentiladoresDocumento12 páginasInforme 3-Ventiladoresjhonathan ever meneses lopezAún no hay calificaciones
- Objetivos PDFDocumento3 páginasObjetivos PDFjhonathan ever meneses lopezAún no hay calificaciones
- Kn3Yjl4U1A R9Ilooxi&List Pl119F4C029918Cff5: TyanezfernandezDocumento1 páginaKn3Yjl4U1A R9Ilooxi&List Pl119F4C029918Cff5: Tyanezfernandezjhonathan ever meneses lopezAún no hay calificaciones
- Deformacion AxialDocumento5 páginasDeformacion Axialjhonathan ever meneses lopezAún no hay calificaciones
- DomoticaDocumento13 páginasDomoticaJoel H A VargasAún no hay calificaciones
- 9958 Jma Ol 02 2021Documento26 páginas9958 Jma Ol 02 2021Marcelo Alejandro Concha VillaAún no hay calificaciones
- Proyecto Biblioteca FinalDocumento36 páginasProyecto Biblioteca FinalJacqueline Portillo100% (2)
- Rocas Siliciclásticas y Diagénesis PDFDocumento12 páginasRocas Siliciclásticas y Diagénesis PDFMaria Ester Navas JAún no hay calificaciones
- CuestionarioDocumento3 páginasCuestionarioyuriAún no hay calificaciones
- Unidad 3 Convección Natural.Documento14 páginasUnidad 3 Convección Natural.Raul LugarAún no hay calificaciones
- Anteproyecto de Climatizacion PDFDocumento63 páginasAnteproyecto de Climatizacion PDFPepi Rojas BenitoAún no hay calificaciones
- Manual Ranger 7000Documento77 páginasManual Ranger 7000Carlos OrizabalAún no hay calificaciones
- Visita A MaderijaDocumento9 páginasVisita A MaderijaAlex FloresAún no hay calificaciones
- Logaritmos y GraficasDocumento7 páginasLogaritmos y GraficasternuraelsyAún no hay calificaciones
- Cuadernillo de FisiscaDocumento35 páginasCuadernillo de FisiscaWilliam Alberto Ruiz CorreaAún no hay calificaciones
- ANEXO 7. Fábula "Piensa Como Un Científico"Documento3 páginasANEXO 7. Fábula "Piensa Como Un Científico"Dany Andres Alape Salguero100% (1)
- Tarea 2 (Diseño de Mezzanine)Documento24 páginasTarea 2 (Diseño de Mezzanine)Miguel100% (1)
- Rapidez de ReacciónDocumento15 páginasRapidez de ReacciónArmando CalvaAún no hay calificaciones
- Método de La SecanteDocumento2 páginasMétodo de La SecantePierre Cardenas BracamonteAún no hay calificaciones
- Unidad 5 ConcretosDocumento8 páginasUnidad 5 ConcretosGOKU VILLEGASAún no hay calificaciones
- Dirección Con Control ElectrónicoDocumento19 páginasDirección Con Control ElectrónicoJ Chatilan AguilarAún no hay calificaciones
- PDI Biomedica CAP1 Parte1Documento40 páginasPDI Biomedica CAP1 Parte1jorge1234567654321Aún no hay calificaciones
- Motor Generador AutosuficienteDocumento7 páginasMotor Generador AutosuficienteJhoan Alexis Garcia PlataAún no hay calificaciones
- Delta DTA - Controlador de Temperatura - Manual PDFDocumento16 páginasDelta DTA - Controlador de Temperatura - Manual PDFpepepepito50% (2)
- Geometria en La Arquitectura: Razonamiento MatematicoDocumento18 páginasGeometria en La Arquitectura: Razonamiento MatematicoCarlos ilaquita AguilarAún no hay calificaciones
- Problemas de Cinetica-1Documento4 páginasProblemas de Cinetica-1GianfrancoAún no hay calificaciones
- Unidad 3 - Etapa 4 - Grupo 63Documento31 páginasUnidad 3 - Etapa 4 - Grupo 63Jairo HurtatisAún no hay calificaciones
- 05 - Mecanica de Rocas - Ensayos de LaboratorioDocumento45 páginas05 - Mecanica de Rocas - Ensayos de LaboratorioElmer Rodrigo Aranguren Campos100% (1)
- Examenes Paeu Matiiccss 2010 2016Documento34 páginasExamenes Paeu Matiiccss 2010 2016Francisco José MoralejoAún no hay calificaciones
- Wuolah Free Resistencia de MaterialesDocumento51 páginasWuolah Free Resistencia de MaterialesInquieta MusarañaAún no hay calificaciones
- Trabajo VirtualDocumento24 páginasTrabajo VirtualFrancibelAún no hay calificaciones
- Robotica Auf 1404Documento13 páginasRobotica Auf 1404Jesus-09Aún no hay calificaciones
- Diseño de Alcantarillas Con 3 HuecosDocumento37 páginasDiseño de Alcantarillas Con 3 HuecosCarlos Eduardo Cueva CallerAún no hay calificaciones
- Serie # 1 TermodinámicaDocumento2 páginasSerie # 1 TermodinámicaAlger AhrAún no hay calificaciones