También podría gustarte
- Inteligencia ArtificialDocumento9 páginasInteligencia ArtificialIsaac SFAún no hay calificaciones
- Reconocimiento de equipo y material en laboratorio de electrónicaDocumento5 páginasReconocimiento de equipo y material en laboratorio de electrónicaIsaac SFAún no hay calificaciones
- Plano Casa HabitaciónDocumento1 páginaPlano Casa HabitaciónIsaac SFAún no hay calificaciones
- Tema 2. Series y Transformadas de FourierDocumento28 páginasTema 2. Series y Transformadas de FouriertenoriojantonioAún no hay calificaciones
- VIolencia de Género en MéxicoDocumento13 páginasVIolencia de Género en MéxicoIsaac SF100% (2)
- Arquitectura MesoamericanaDocumento6 páginasArquitectura MesoamericanaIsaac SFAún no hay calificaciones
- Practica 08 - FerrofluidosDocumento5 páginasPractica 08 - FerrofluidosIsaac SFAún no hay calificaciones
- Origen Del Hombre TodoDocumento9 páginasOrigen Del Hombre TodoIsaac SFAún no hay calificaciones
- Apu Partidas NuevasDocumento51 páginasApu Partidas NuevasMaguiber ChvAún no hay calificaciones
- Caldera FallasDocumento2 páginasCaldera FallasBruno HenriquezAún no hay calificaciones
- Lab 2 (Informe) - Universidad Tecnologica de PanamaDocumento9 páginasLab 2 (Informe) - Universidad Tecnologica de PanamaRicardo GonzalezAún no hay calificaciones
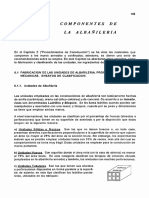
- Constr Albanileria Cap06 PDFDocumento22 páginasConstr Albanileria Cap06 PDFJean Carlos GarciaAún no hay calificaciones
- SEP Sistemas Por UnidadDocumento18 páginasSEP Sistemas Por UnidadEric MillerAún no hay calificaciones
- Practica de FISICADocumento12 páginasPractica de FISICAWilmerAriasAún no hay calificaciones
- ENSAYO DE RESISTENCIA Y ABSORCIÓN DE AGUA EN LADRILLOSDocumento20 páginasENSAYO DE RESISTENCIA Y ABSORCIÓN DE AGUA EN LADRILLOSAbel Crispin MendozaAún no hay calificaciones
- Metalurgia GeneralDocumento24 páginasMetalurgia GeneralcesarAún no hay calificaciones
- Taller Potencia Fluida - Bombas y MotoresDocumento11 páginasTaller Potencia Fluida - Bombas y MotoresJulianManriqueAún no hay calificaciones
- OSBGT74Documento16 páginasOSBGT74nucacaAún no hay calificaciones
- Reactor oxicloración MP 11m3Documento3 páginasReactor oxicloración MP 11m3ClaudiaPalominoZelayaAún no hay calificaciones
- Fracturamiento HidraulicoDocumento13 páginasFracturamiento Hidraulicokarinamedinan89% (9)
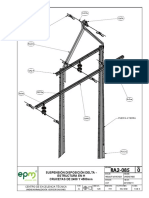
- Ra2 085 PDFDocumento4 páginasRa2 085 PDFjevmcuAún no hay calificaciones
- Fundamentos Del Hardware LibreDocumento8 páginasFundamentos Del Hardware LibreNohelis HernandezAún no hay calificaciones
- Curriculum VitaeDocumento1 páginaCurriculum VitaeSebastianEstobarAún no hay calificaciones
- Crear Imagen Con USB Generation Tool - Disco ExternoDocumento8 páginasCrear Imagen Con USB Generation Tool - Disco ExternoChristianCaAún no hay calificaciones
- NMX J 066 AnceDocumento9 páginasNMX J 066 AnceMisael HernándezAún no hay calificaciones
- P9-Clasificacion de SuelosDocumento28 páginasP9-Clasificacion de SuelosThomas RomeroAún no hay calificaciones
- Informe 4 EctDocumento5 páginasInforme 4 EctedusuntasigAún no hay calificaciones
- Manual Práctico de Instalaciones Eléctricas - Enriquez HarperDocumento296 páginasManual Práctico de Instalaciones Eléctricas - Enriquez HarperRama100% (7)
- Laboratorio 5 CircuitosDocumento48 páginasLaboratorio 5 Circuitosjohn haileAún no hay calificaciones
- EJERCICIOS - Mecánica de FluidosDocumento12 páginasEJERCICIOS - Mecánica de FluidosKarenGarciaGrandaAún no hay calificaciones
- Historia de La Aviación en MexicoDocumento6 páginasHistoria de La Aviación en MexicoyadirahernandezAún no hay calificaciones
- Tema 4 Hardware 3º ESODocumento11 páginasTema 4 Hardware 3º ESOMontse LópezAún no hay calificaciones
- Linea RepartidoraDocumento2 páginasLinea RepartidoraДэвид Эмануэль СалинасAún no hay calificaciones
- Angulo de Avance EncendidoDocumento8 páginasAngulo de Avance EncendidoAndres Fernando Baez MaldonadoAún no hay calificaciones
- Cálculo de parámetros geométricos de diseño de carreterasDocumento38 páginasCálculo de parámetros geométricos de diseño de carreteraseliezerAún no hay calificaciones
- Cinemática de cuerpos rígidos: problemas de velocidad angular y linealDocumento3 páginasCinemática de cuerpos rígidos: problemas de velocidad angular y linealEdison Paul Tierra Tierra100% (1)
- Hormigonera 7-9 m3: camión mezclador de hormigón HyundaiDocumento7 páginasHormigonera 7-9 m3: camión mezclador de hormigón Hyundaiparachute76Aún no hay calificaciones
- At 37Documento30 páginasAt 37Jhonatan VcAún no hay calificaciones
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Fisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposDe EverandFisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposAún no hay calificaciones
- Mil ejercicios de preparación física (2 Vol)De EverandMil ejercicios de preparación física (2 Vol)Calificación: 3 de 5 estrellas3/5 (5)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Montaje de cuadros de control y dispositivos eléctricos y electrónicos de sistemas domóticoDe EverandMontaje de cuadros de control y dispositivos eléctricos y electrónicos de sistemas domóticoAún no hay calificaciones