También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Formulario de Derivadas e IntegralesDocumento1 páginaFormulario de Derivadas e IntegralesDara GuzmánAún no hay calificaciones
- Codex Calculo I CompletoDocumento202 páginasCodex Calculo I CompletoKarla Gabriel80% (5)
- Fórmulas de Derivadas e IntegralesDocumento2 páginasFórmulas de Derivadas e IntegralesJhosephRamonAylasAún no hay calificaciones
- Conceptos FundamentalesDocumento12 páginasConceptos FundamentalesMariela CoyoAún no hay calificaciones
- 700 LIBROS TECNICOS - by PeterPankDocumento19 páginas700 LIBROS TECNICOS - by PeterPankjaviercfAún no hay calificaciones
- Gradient eDocumento11 páginasGradient eJeronimo FabianAún no hay calificaciones
- Godel, Kurt - La Lógica Matemática de Russell PDFDocumento25 páginasGodel, Kurt - La Lógica Matemática de Russell PDFfacultad36Aún no hay calificaciones
- Tabla Integrales Inmediatas PDFDocumento1 páginaTabla Integrales Inmediatas PDFKarolay De Los SantosAún no hay calificaciones
- Ejercicios de Examen - Reacciones AlquenosDocumento17 páginasEjercicios de Examen - Reacciones AlquenosalvaroAún no hay calificaciones
- Ejercicios de Examen - Reacciones AlquenosDocumento17 páginasEjercicios de Examen - Reacciones AlquenosalvaroAún no hay calificaciones
- Formulas Calculo DiferencialDocumento1 páginaFormulas Calculo DiferencialEdwin David SánchezAún no hay calificaciones
- Formulario Matematicas Ii IttepicDocumento13 páginasFormulario Matematicas Ii IttepicpedrulAún no hay calificaciones
- Formulas Calculo Integral-DiferencialDocumento1 páginaFormulas Calculo Integral-DiferencialJosuéRamírezAún no hay calificaciones
- Formulario de Integrales 63844 Downloable 2604283Documento3 páginasFormulario de Integrales 63844 Downloable 2604283Yordy Mejía oropezaAún no hay calificaciones
- Formulario CalculoDocumento4 páginasFormulario CalculoDebanhi GoveaAún no hay calificaciones
- Semana 04: Otras Formas Usuales de Integración: Facultad de Ingenieria de MinasDocumento9 páginasSemana 04: Otras Formas Usuales de Integración: Facultad de Ingenieria de Minasfabricio jaime huamanAún no hay calificaciones
- Material-Integral Indefinida PDFDocumento82 páginasMaterial-Integral Indefinida PDFDenis Dominguez100% (1)
- Parte 2FORMULARIOINTEGRAL - Stewart - James 2008 2013 MATE II-4-7Documento4 páginasParte 2FORMULARIOINTEGRAL - Stewart - James 2008 2013 MATE II-4-7Milka Rios AvendañoAún no hay calificaciones
- 4.4 Integracion Pos SustitucionDocumento15 páginas4.4 Integracion Pos SustitucionPepáAún no hay calificaciones
- Sesion 5. Tabla de Integrales-EjerciciosDocumento4 páginasSesion 5. Tabla de Integrales-EjerciciosWilder S. RivasAún no hay calificaciones
- Formulas de Integración y DerivaciónDocumento2 páginasFormulas de Integración y DerivaciónGeraldine Viviana Rodrigo MontesAún no hay calificaciones
- Formulario IntegralesDocumento10 páginasFormulario IntegralesHelen AcuñaAún no hay calificaciones
- Formularios PDFDocumento4 páginasFormularios PDFEduardo RamosAún no hay calificaciones
- FORMULARIODocumento4 páginasFORMULARIOPly AngelAún no hay calificaciones
- Formularios PDFDocumento4 páginasFormularios PDFEduardo Ramos100% (1)
- Formulas de Integración y DerivaciónDocumento3 páginasFormulas de Integración y DerivaciónLeyla Huamani MartinezAún no hay calificaciones
- 05 Formulario IntegralesDocumento1 página05 Formulario IntegralesMaldonado Piñon Sara AliciaAún no hay calificaciones
- Formulario de IntegralesDocumento2 páginasFormulario de IntegralesMELANY ESTHER MARCHAN SANDOVALAún no hay calificaciones
- 1 Integral IndefinidaDocumento19 páginas1 Integral IndefinidaMiguel Angel Saravia CuevaAún no hay calificaciones
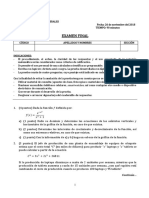
- Ef Ci 2018-2Documento5 páginasEf Ci 2018-2Cesar Alarcon Luna VictoriaAún no hay calificaciones
- Pd°01 - Ed-2020 - 20 - ADocumento3 páginasPd°01 - Ed-2020 - 20 - Aconcha luisAún no hay calificaciones
- Formulas de IntegracionDocumento4 páginasFormulas de IntegracionVictor Manuel Torres ectorAún no hay calificaciones
- Ef Ci 2019-0Documento5 páginasEf Ci 2019-0Cesar Alarcon Luna VictoriaAún no hay calificaciones
- Formulas de IntegralesDocumento10 páginasFormulas de IntegralesJHAIR ALEXIS BAZAN CHIRAAún no hay calificaciones
- Fórmulas de Integrales InmediatasDocumento2 páginasFórmulas de Integrales Inmediatasmisael zuñiga najeraAún no hay calificaciones
- FORMULASDocumento3 páginasFORMULASJT PeAún no hay calificaciones
- Practica Calificada N°01b - Calculo Iii-2019 10 PDFDocumento2 páginasPractica Calificada N°01b - Calculo Iii-2019 10 PDFEduardo Josué Suarez LlallicoAún no hay calificaciones
- Reglas Básicas de Integración PDFDocumento1 páginaReglas Básicas de Integración PDFalvaroAún no hay calificaciones
- Tabla Integrales InmediatasDocumento1 páginaTabla Integrales InmediatasKarolay De Los SantosAún no hay calificaciones
- EdoDocumento90 páginasEdoRobinsonGermánIndalecioAún no hay calificaciones
- Hoja de Respuestas Examen Final HistoriaDocumento1 páginaHoja de Respuestas Examen Final Historia14 Alan Eduardo Gamboa RojasAún no hay calificaciones
- Form Mate Vi 2019Documento2 páginasForm Mate Vi 2019Anonymous oABoIJLAún no hay calificaciones
- Calculo3 Prueba de Desarrollo 1Documento12 páginasCalculo3 Prueba de Desarrollo 1concha luisAún no hay calificaciones
- Trabajo Autonomo 03 - ProbabilidadesDocumento7 páginasTrabajo Autonomo 03 - ProbabilidadesOberluisAún no hay calificaciones
- Tablas de IntegraciónDocumento5 páginasTablas de IntegraciónRicardo DonosoAún no hay calificaciones
- FormularioDocumento1 páginaFormularioSamira OjedaAún no hay calificaciones
- Tabla de Derivadas e Integrales InmediatasDocumento2 páginasTabla de Derivadas e Integrales InmediatasJose QuinteroAún no hay calificaciones
- Tecnicas de IntegracionDocumento31 páginasTecnicas de Integracionnina yadiraAún no hay calificaciones
- ANEXO TEST de BullyingDocumento2 páginasANEXO TEST de BullyingJuan Carlos MORALES TOLE100% (1)
- Formulas IntegralesDocumento17 páginasFormulas Integraleshenry 1979Aún no hay calificaciones
- ED ExactasDocumento7 páginasED ExactasJean Carlos Ortiz PezuaAún no hay calificaciones
- IntegraciónDocumento19 páginasIntegraciónDavid Pierce100% (1)
- Tabla de Integrales & DerivadasDocumento6 páginasTabla de Integrales & DerivadasJuan EscobarAún no hay calificaciones
- Examen Simulador Comipems 2022Documento25 páginasExamen Simulador Comipems 2022Gabriel cruz martinezAún no hay calificaciones
- Tabla Básica de Integrales-2022-1Documento1 páginaTabla Básica de Integrales-2022-1keisi escalanteAún no hay calificaciones
- Tabela DerivadasDocumento1 páginaTabela DerivadasFabio GomesAún no hay calificaciones
- Practica 3 PDFDocumento4 páginasPractica 3 PDFJhonathan Romero PaucarAún no hay calificaciones
- 6 La ElipseDocumento10 páginas6 La ElipseLuis GuarachiAún no hay calificaciones
- Tabla Integrales Funciones ElementalesDocumento1 páginaTabla Integrales Funciones ElementalesJuan alexander Polo asisAún no hay calificaciones
- 23 Sustituciones Trigonometricas Calculo Larson 9a PDFDocumento9 páginas23 Sustituciones Trigonometricas Calculo Larson 9a PDFmanuel1731100% (1)
- Cónica. ElipseDocumento9 páginasCónica. ElipseNoel RodriguezAún no hay calificaciones
- Tabla de Integrales Inmediatas DDocumento2 páginasTabla de Integrales Inmediatas DBárbara GuillénAún no hay calificaciones
- Formulario - Lopez Michelini - MejoradoDocumento5 páginasFormulario - Lopez Michelini - MejoradoJEREMY GIRON CISNEROSAún no hay calificaciones
- Tabla de IntegralesDocumento2 páginasTabla de IntegralesjoeAún no hay calificaciones
- FORMULARIO Calculo Integral y DiferencialDocumento3 páginasFORMULARIO Calculo Integral y DiferencialAle MoraAún no hay calificaciones
- AROMATICOS1Documento18 páginasAROMATICOS1Edith GutierrezAún no hay calificaciones
- Banco de Preguntas para QMC 200Documento6 páginasBanco de Preguntas para QMC 200Carly Jung KookAún no hay calificaciones
- Practica 2°parcial GrupoaDocumento4 páginasPractica 2°parcial GrupoaEfrain MiguelAún no hay calificaciones
- Proyecto EfraínDocumento1 páginaProyecto EfraínEfrain MiguelAún no hay calificaciones
- OragnicaDocumento1 páginaOragnicaEfrain MiguelAún no hay calificaciones
- Protocolo - Tabla PeriódicaDocumento3 páginasProtocolo - Tabla PeriódicaEfrain MiguelAún no hay calificaciones
- Práctica 1Documento2 páginasPráctica 1Efrain MiguelAún no hay calificaciones
- Estructura y EnlaceDocumento3 páginasEstructura y EnlaceEfrain MiguelAún no hay calificaciones
- Cálculo Adm Prác 1-22Documento2 páginasCálculo Adm Prác 1-22Bravo EcoAún no hay calificaciones
- PROYECTO EFRAÍN MiguelpDocumento10 páginasPROYECTO EFRAÍN MiguelpEfrain MiguelAún no hay calificaciones
- PROYECTO EFRAÍN Miguelp - Copia UltimaDocumento10 páginasPROYECTO EFRAÍN Miguelp - Copia UltimaEfrain MiguelAún no hay calificaciones
- Proyecto Efraín 1Documento5 páginasProyecto Efraín 1Efrain MiguelAún no hay calificaciones
- Mat103 1P 2.2019Documento6 páginasMat103 1P 2.2019David GirondaAún no hay calificaciones
- Disolusiones 2Documento3 páginasDisolusiones 2Efrain MiguelAún no hay calificaciones
- EP No 13 (RECUPERACION), QMC100, 1-19Documento1 páginaEP No 13 (RECUPERACION), QMC100, 1-19Efrain MiguelAún no hay calificaciones
- Calculo I (1-2017) Ex PDFDocumento6 páginasCalculo I (1-2017) Ex PDFEfrain MiguelAún no hay calificaciones
- Cal1 - For2p-1Documento2 páginasCal1 - For2p-1L0% (1)
- Ejerccios de Quimioca Organica 2Documento11 páginasEjerccios de Quimioca Organica 2Efrain MiguelAún no hay calificaciones
- Integrales TodoDocumento215 páginasIntegrales TodoSusana Mitta MamaniAún no hay calificaciones
- Conic AsDocumento30 páginasConic AscatursalAún no hay calificaciones
- For 1er Par. Mat101Documento5 páginasFor 1er Par. Mat101Edzon YujraAún no hay calificaciones
- Practica de Laboratorio 2 ExtraccionDocumento42 páginasPractica de Laboratorio 2 ExtraccionEfrain MiguelAún no hay calificaciones
- EXTRACCIONDocumento18 páginasEXTRACCIONEfrain MiguelAún no hay calificaciones
- SCUVDeber 10Documento4 páginasSCUVDeber 10Luis Fernando BaqueAún no hay calificaciones
- A. M. I - F.r.re. - Prog. Analítico y Bibliografía 2020Documento3 páginasA. M. I - F.r.re. - Prog. Analítico y Bibliografía 2020Julieta GarciaAún no hay calificaciones
- Silabo EC 342 Economia Matematica II 2019Documento4 páginasSilabo EC 342 Economia Matematica II 2019Tanner AlvaAún no hay calificaciones
- Microsoft Word - Cap 4 Aplicaciones de La IntegralDocumento14 páginasMicrosoft Word - Cap 4 Aplicaciones de La IntegralZeroAún no hay calificaciones
- Integral Definida PDFDocumento35 páginasIntegral Definida PDFaref2007Aún no hay calificaciones
- Informe de Laboratorio - Mecánica de Suelos y PavimentosDocumento3 páginasInforme de Laboratorio - Mecánica de Suelos y PavimentosJorge GutierrezAún no hay calificaciones
- Metodo de FrobeniusDocumento3 páginasMetodo de FrobeniusCristhian CuichánAún no hay calificaciones
- Capitulo6 Integral Indefinida2021Documento66 páginasCapitulo6 Integral Indefinida2021EDSON ALEXANDER JARA CANTUAún no hay calificaciones
- Calculo Test 3 y 4 CorrectasDocumento4 páginasCalculo Test 3 y 4 CorrectasALDO MAURICIO NARANJO MORANAún no hay calificaciones
- Taller Análisis de Fourier MATE YADocumento12 páginasTaller Análisis de Fourier MATE YAAlexa CanoAún no hay calificaciones
- COSTO FINANCIERO TOTAL Presentacion 2016 ActualizadoDocumento10 páginasCOSTO FINANCIERO TOTAL Presentacion 2016 ActualizadoNacho PerayreAún no hay calificaciones
- Integral Polar EsDocumento27 páginasIntegral Polar EsjcaredesAún no hay calificaciones
- Derivadas ParcialesDocumento2 páginasDerivadas ParcialesJulio BarceloAún no hay calificaciones
- Temas Matematicas OposicionDocumento4 páginasTemas Matematicas Oposicionjgalan79Aún no hay calificaciones
- Análisis Matemático IDocumento10 páginasAnálisis Matemático IvanesaAún no hay calificaciones
- Grupo 5 - El Problema Del Obstáculo - MODocumento9 páginasGrupo 5 - El Problema Del Obstáculo - MOCaballero Alférez Roy TorresAún no hay calificaciones
- Actividad 3 Ecuaciones DiferencialesDocumento12 páginasActividad 3 Ecuaciones Diferencialesmaria isabela triana torresAún no hay calificaciones
- Tema 1-Ecuaciones DiferencialesDocumento165 páginasTema 1-Ecuaciones DiferencialesSenhekAún no hay calificaciones
- Integrales IteradasDocumento7 páginasIntegrales IteradasmarluniAún no hay calificaciones
- Sec 13.4 y 13.5 Cadena y TaylorDocumento20 páginasSec 13.4 y 13.5 Cadena y TaylorjjgalvisAún no hay calificaciones
- Una Ecuación Diferencial Es Una Ecuación en La Que Intervienen Derivadas de Una o Más FuncionesDocumento7 páginasUna Ecuación Diferencial Es Una Ecuación en La Que Intervienen Derivadas de Una o Más FuncionesAna G Marcano SandovalAún no hay calificaciones
- Diapositivas de Metodos NumericosDocumento60 páginasDiapositivas de Metodos NumericosYunelkis MarcanoAún no hay calificaciones
- Aprende A Integrar. - Propiedades de Las Integrales, 2014 - Julián Moreno Mestre, (Academia Las Rozas) PDFDocumento30 páginasAprende A Integrar. - Propiedades de Las Integrales, 2014 - Julián Moreno Mestre, (Academia Las Rozas) PDFFranciscoAún no hay calificaciones
- Matemáticas Universitarias - Rafael Isaac Vásquez CruzDocumento8 páginasMatemáticas Universitarias - Rafael Isaac Vásquez CruzIsaac CruzAún no hay calificaciones
- Presentación Del Curso de Cálculo VectorialDocumento13 páginasPresentación Del Curso de Cálculo VectorialFRANCISCO SANCHEZ MARESAún no hay calificaciones
- Cuaderno Calculo IntegralDocumento115 páginasCuaderno Calculo IntegralAndy HackerAún no hay calificaciones
- Reporte de Las Aplicaciones de Diferenciales en Aproximaciones y Estimaciones ACTIVIDAD 23Documento2 páginasReporte de Las Aplicaciones de Diferenciales en Aproximaciones y Estimaciones ACTIVIDAD 23Ellie Duran0% (2)