También podría gustarte
- BalanceoDocumento24 páginasBalanceoLeonardo Alejandro Vargas TorrezAún no hay calificaciones
- Balanceo de Los Rotores Solidos NxpowerliteDocumento13 páginasBalanceo de Los Rotores Solidos NxpowerliteCarlos Gabriel EstergaardAún no hay calificaciones
- Unidad IV Balanceo de RotoresDocumento19 páginasUnidad IV Balanceo de RotoresJ Rodrigo Castro HAún no hay calificaciones
- Analisis de Fuerzas DinamicasDocumento60 páginasAnalisis de Fuerzas DinamicasArielMaldonadoAún no hay calificaciones
- Diapositivas de Balanceo de Masas RotativasDocumento22 páginasDiapositivas de Balanceo de Masas RotativasjeminaAún no hay calificaciones
- Balanceo en Un PlanoDocumento6 páginasBalanceo en Un PlanoHéctor LaraAún no hay calificaciones
- Ap6 1 PDFDocumento29 páginasAp6 1 PDFMaritza PomaAún no hay calificaciones
- TorqueDocumento6 páginasTorquePaul QuimbiambaAún no hay calificaciones
- Manual de Instalacion Aqua Pak Serie FixDocumento12 páginasManual de Instalacion Aqua Pak Serie FixMr. AlegríaAún no hay calificaciones
- Fatiga Diseño de Elementos Mecanicos.Documento7 páginasFatiga Diseño de Elementos Mecanicos.Daniel SanchezAún no hay calificaciones
- Metalografia InvestigacionDocumento17 páginasMetalografia InvestigacionJosé Alfredo Patiño RiveraAún no hay calificaciones
- Articulo de Velocidad Critica en EjesDocumento19 páginasArticulo de Velocidad Critica en EjesYomira TapiaAún no hay calificaciones
- Diseño Optimo RecienteDocumento20 páginasDiseño Optimo RecienteMarlot100% (1)
- Labores Balanceo PDFDocumento10 páginasLabores Balanceo PDFsantiago foreroAún no hay calificaciones
- SolenoideDocumento7 páginasSolenoideLuisLopezAún no hay calificaciones
- Balanceo Equipo - 1Documento15 páginasBalanceo Equipo - 1Ariadna Jacqueline Beltran ReyesAún no hay calificaciones
- Practica XI Vibraciones MecanicasDocumento24 páginasPractica XI Vibraciones MecanicasMario100% (1)
- Balanceo Unidad IVDocumento10 páginasBalanceo Unidad IVFelipeCamachoIbarraAún no hay calificaciones
- Ensayo FatigaDocumento7 páginasEnsayo FatigaBrian Roy Cabrera RojasAún no hay calificaciones
- Momento Polar de InerciaDocumento9 páginasMomento Polar de InerciaDavid Muzo BombónAún no hay calificaciones
- Expo DiseñoDocumento34 páginasExpo DiseñoLinda de la RansAún no hay calificaciones
- Tema 6Documento48 páginasTema 6LizGonzalezC100% (1)
- Balanceo y Alineación de Máquinas.Documento26 páginasBalanceo y Alineación de Máquinas.Jose Ignacio Vera GutierrezAún no hay calificaciones
- Fatiga de Elementos de MaquinasDocumento12 páginasFatiga de Elementos de MaquinasmaferzhAún no hay calificaciones
- Metodos de Balanceo PDFDocumento40 páginasMetodos de Balanceo PDFVictor Vera SAún no hay calificaciones
- Diseño de Elementos Mecánicos, Diseño de Sujetadores.Documento12 páginasDiseño de Elementos Mecánicos, Diseño de Sujetadores.Alan Macam50% (2)
- Alineación y Balanceo de MaquinasDocumento21 páginasAlineación y Balanceo de MaquinasAldo Alberto Garcia Gallegos67% (3)
- Tipos de Desbalanceo - Docx Tarea AnayaDocumento13 páginasTipos de Desbalanceo - Docx Tarea Anayarogelio120387Aún no hay calificaciones
- Mantenimiento Bomba de Engranajes C.M.I.Documento10 páginasMantenimiento Bomba de Engranajes C.M.I.DFerreira_FerAún no hay calificaciones
- Informe de Fatiga y PandeoDocumento26 páginasInforme de Fatiga y PandeoJonathan Rojas MillarAún no hay calificaciones
- Resistencia A La FatigaDocumento15 páginasResistencia A La FatigaAna MorenoAún no hay calificaciones
- Ensayo de FatigaDocumento42 páginasEnsayo de FatigaDaniel ARAún no hay calificaciones
- Anàlisi FEMDocumento59 páginasAnàlisi FEMlizhuertaAún no hay calificaciones
- Todo Sobre RodamientosDocumento5 páginasTodo Sobre RodamientosmaurygluisAún no hay calificaciones
- Proceso de Ensayo de Fatiga A Baja Frecuencia (Patente) DR JrasaDocumento11 páginasProceso de Ensayo de Fatiga A Baja Frecuencia (Patente) DR JrasaZoombisito FrancoAún no hay calificaciones
- Balanceo Dinamico de Rotores en Un PlanoDocumento3 páginasBalanceo Dinamico de Rotores en Un PlanoErik BadilloAún no hay calificaciones
- Mantenimiento Predictivo o Monitoreo de Condición Pesentacion Expo2 PDFDocumento15 páginasMantenimiento Predictivo o Monitoreo de Condición Pesentacion Expo2 PDFOscar Vicente MartinezAún no hay calificaciones
- Analisis y Diseno de Una Gata MecanicaDocumento21 páginasAnalisis y Diseno de Una Gata Mecanicadavid ortiz lutzowAún no hay calificaciones
- Trabajo END Prueba Hidrostatica y NeumaticaDocumento18 páginasTrabajo END Prueba Hidrostatica y NeumaticaGerardo BecerraAún no hay calificaciones
- Actuadores InvestigacionDocumento26 páginasActuadores InvestigacionSol GómezAún no hay calificaciones
- Causas de Desbalanceo en Máquinas RotativasDocumento8 páginasCausas de Desbalanceo en Máquinas RotativasGessica CañasAún no hay calificaciones
- Mantenimiento ModificativoDocumento10 páginasMantenimiento ModificativoMiguelAún no hay calificaciones
- VIBRACIONES MECANICAS en PDFDocumento23 páginasVIBRACIONES MECANICAS en PDFhector ibarraAún no hay calificaciones
- Balanceo DinámicoDocumento7 páginasBalanceo DinámicoHéctor PeñaAún no hay calificaciones
- Velocidades CriticasDocumento39 páginasVelocidades CriticasDavid Frias BastarAún no hay calificaciones
- Ensayo Velocidad CriticaDocumento5 páginasEnsayo Velocidad CriticaBrian Roy Cabrera RojasAún no hay calificaciones
- Ensayo Completo de Una Bomba CentrifugaDocumento11 páginasEnsayo Completo de Una Bomba CentrifugaLuis Miguel LnAún no hay calificaciones
- Amef TurbinaDocumento2 páginasAmef TurbinaDaniel López100% (1)
- Proyecto de AutomatizaciónDocumento10 páginasProyecto de AutomatizaciónCesar Imba AAún no hay calificaciones
- 4.3. Bombas Rotoestáticas.Documento4 páginas4.3. Bombas Rotoestáticas.gaudri100% (1)
- Balanceo Estatico y DinamicoDocumento9 páginasBalanceo Estatico y DinamicoFreddy AyalaAún no hay calificaciones
- MANTENIMIENTO3Documento7 páginasMANTENIMIENTO3Yesenia VargasAún no hay calificaciones
- Ejes FlexiblesDocumento11 páginasEjes FlexiblesRaúl AntoniöAún no hay calificaciones
- Alineación de Poleas y BandasDocumento3 páginasAlineación de Poleas y BandasCesar Vazquez100% (1)
- Ensayo Velocidad CriticaDocumento4 páginasEnsayo Velocidad CriticaSamuelIvanBonillaGraciaAún no hay calificaciones
- Causa RaizDocumento11 páginasCausa RaizcarlosAún no hay calificaciones
- Segundo Parcial Dinámica de MaquinasDocumento5 páginasSegundo Parcial Dinámica de MaquinasMARCOS JOSE DURONAún no hay calificaciones
- Análisis Dinámico de Mecanismos 2021-1 - Sesion14Documento16 páginasAnálisis Dinámico de Mecanismos 2021-1 - Sesion14Berthold VillavicencioAún no hay calificaciones
- Clase DM7Documento31 páginasClase DM7ByronAún no hay calificaciones
- Bitacora 8va SemanaDocumento1 páginaBitacora 8va SemanaArielMaldonadoAún no hay calificaciones
- Bitacora 7ta SemanaDocumento1 páginaBitacora 7ta SemanaArielMaldonadoAún no hay calificaciones
- Bitacora 7ta SemanaDocumento1 páginaBitacora 7ta SemanaArielMaldonadoAún no hay calificaciones
- Bitacora 9na SemanaDocumento1 páginaBitacora 9na SemanaArielMaldonadoAún no hay calificaciones
- Bitacora 8va SemanaDocumento1 páginaBitacora 8va SemanaArielMaldonadoAún no hay calificaciones
- Bitacora 4ta SemanaDocumento1 páginaBitacora 4ta SemanaArielMaldonadoAún no hay calificaciones
- Informe Práctica SupervisadaDocumento136 páginasInforme Práctica SupervisadaArielMaldonadoAún no hay calificaciones
- Informe Práctica Supervisada Mecánica 1Documento120 páginasInforme Práctica Supervisada Mecánica 1ArielMaldonadoAún no hay calificaciones
- Informe Práctica Supervisada Metalurgia 1Documento63 páginasInforme Práctica Supervisada Metalurgia 1ArielMaldonadoAún no hay calificaciones
- Informe Práctica Supervisada Plantilla MECANICADocumento10 páginasInforme Práctica Supervisada Plantilla MECANICAArielMaldonado0% (1)
- Actividad #3Documento5 páginasActividad #3ArielMaldonadoAún no hay calificaciones
- Bitacora 4ta SemanaDocumento1 páginaBitacora 4ta SemanaArielMaldonadoAún no hay calificaciones
- Informe Práctica Supervisada Plantilla MetalurgiaDocumento12 páginasInforme Práctica Supervisada Plantilla MetalurgiaArielMaldonadoAún no hay calificaciones
- Tesis Sobre La FotogrametriaDocumento121 páginasTesis Sobre La FotogrametriaArielMaldonadoAún no hay calificaciones
- Informe Práctica Supervisada CorregidaDocumento134 páginasInforme Práctica Supervisada CorregidaArielMaldonadoAún no hay calificaciones
- Proyecto Final de La Empresa Fabricadora Maquina Peladora de Piña y Versatil para Otras Frutas o VerdurasDocumento99 páginasProyecto Final de La Empresa Fabricadora Maquina Peladora de Piña y Versatil para Otras Frutas o VerdurasArielMaldonadoAún no hay calificaciones
- Propuesta de TesisDocumento17 páginasPropuesta de TesisArielMaldonadoAún no hay calificaciones
- Indicaciones para La Realizacion de Práctica Profesional e InformeDocumento12 páginasIndicaciones para La Realizacion de Práctica Profesional e InformeArielMaldonadoAún no hay calificaciones
- Investigacion Sobre CombustiblesDocumento18 páginasInvestigacion Sobre CombustiblesArielMaldonadoAún no hay calificaciones
- Manual Horno de GasDocumento8 páginasManual Horno de GasArielMaldonadoAún no hay calificaciones
- Laboratorio #3 MantenimientoDocumento5 páginasLaboratorio #3 MantenimientoArielMaldonadoAún no hay calificaciones
- Jose Maldonado Tarea04Documento4 páginasJose Maldonado Tarea04ArielMaldonadoAún no hay calificaciones
- Ley de OhmDocumento4 páginasLey de OhmArielMaldonadoAún no hay calificaciones
- Examen 2 Analisis NumericoDocumento7 páginasExamen 2 Analisis NumericoArielMaldonadoAún no hay calificaciones
- Plan de Contingencia Defensa CivilDocumento21 páginasPlan de Contingencia Defensa CivilMARTINAún no hay calificaciones
- Mejoramiento Del SueloDocumento21 páginasMejoramiento Del SuelojoseAún no hay calificaciones
- 4.mce Almacafe ReforzamientoDocumento869 páginas4.mce Almacafe Reforzamientoandres riañoAún no hay calificaciones
- PFC Anexo 2Documento210 páginasPFC Anexo 2jefferson77valienteAún no hay calificaciones
- Introduccion Sistemas Levantamiento ArtificialDocumento35 páginasIntroduccion Sistemas Levantamiento Artificialdiego isaacAún no hay calificaciones
- OtroDocumento27 páginasOtrosusana montero javierAún no hay calificaciones
- Constancia de No AdeudoDocumento1 páginaConstancia de No AdeudoVanessa GuzmanAún no hay calificaciones
- Informe Laboratorio CeramicaDocumento5 páginasInforme Laboratorio CeramicaJuan David BuilesAún no hay calificaciones
- Domina Los Punteros Con Formato ANY - PROGRAMACIÓN SIEMENSDocumento7 páginasDomina Los Punteros Con Formato ANY - PROGRAMACIÓN SIEMENSaAún no hay calificaciones
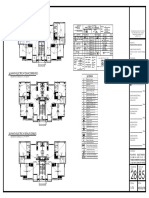
- Diseno Electrico Por ApartamentoDocumento1 páginaDiseno Electrico Por Apartamentooscar moreno loraAún no hay calificaciones
- SRM ProveedoresDocumento13 páginasSRM Proveedoreshenrysobrino100% (1)
- Inf. GeomecanicaDocumento14 páginasInf. GeomecanicaJuancho TusinAún no hay calificaciones
- Texto de NormasDocumento250 páginasTexto de NormasWilber Marcelo Apaz ArancibiaAún no hay calificaciones
- Las Comunicaciones en Emergencias y CatástrofesDocumento22 páginasLas Comunicaciones en Emergencias y CatástrofesmenssesAún no hay calificaciones
- Terremoto de CarmonaDocumento24 páginasTerremoto de CarmonaJosuá Suárez LópezAún no hay calificaciones
- Fcaw TR1Documento12 páginasFcaw TR1takeo Ramos chaconAún no hay calificaciones
- Unidad 3 - 2021Documento147 páginasUnidad 3 - 2021MIGUEL DIOGENES RAMOS RODRIGUEZAún no hay calificaciones
- 16 Redox TestDocumento10 páginas16 Redox TestAlfonso HernangilAún no hay calificaciones
- Máquinas Hidráulicas 6Documento7 páginasMáquinas Hidráulicas 6BRYANAún no hay calificaciones
- Porticos EstructurasDocumento28 páginasPorticos Estructuraszaga_75Aún no hay calificaciones
- Predimensionamiento de Vigas y Losa AligeradaDocumento4 páginasPredimensionamiento de Vigas y Losa AligeradaAxcell Leonardo Barrenechea RamosAún no hay calificaciones
- Majes Siguas ProinversionDocumento11 páginasMajes Siguas ProinversionCarlos VegaAún no hay calificaciones
- Ludeña ReDocumento57 páginasLudeña ReFranklin Tovar PaucarAún no hay calificaciones
- Proyecto Servicio Comunitario Plan Alfabetización Tecnologíca PDFDocumento25 páginasProyecto Servicio Comunitario Plan Alfabetización Tecnologíca PDFRubén Darío Saa MontañoAún no hay calificaciones
- Fumasa S.ADocumento6 páginasFumasa S.AJhonyAún no hay calificaciones
- ANalisis Arquitectonico de Templo de MinervaDocumento18 páginasANalisis Arquitectonico de Templo de MinervaMariaPaulaMarinAún no hay calificaciones
- Tippens - Dinamica de Cuerpo RigidoDocumento33 páginasTippens - Dinamica de Cuerpo Rigidojaimecolonche100% (1)
- CuradoDocumento29 páginasCuradoYamila BeltranAún no hay calificaciones
- Control de Ubicacion de PernosDocumento1 páginaControl de Ubicacion de Pernosroger palacin mendozaAún no hay calificaciones
- Hidrologia ExposicionDocumento24 páginasHidrologia ExposicionBrayan Yahir Colchado IrcañaupaAún no hay calificaciones