También podría gustarte
- Jhonatan Quiroz Barreto 2150504 21 Tarea1Documento10 páginasJhonatan Quiroz Barreto 2150504 21 Tarea1Jhonatan Quiroz0% (1)
- Paso1 Grupo20 Jhonatan QuirozDocumento20 páginasPaso1 Grupo20 Jhonatan QuirozJhonatan QuirozAún no hay calificaciones
- 2.3.2.3 Packet Tracer - Troubleshooting Static Routes InstructionsDocumento4 páginas2.3.2.3 Packet Tracer - Troubleshooting Static Routes InstructionsJhonatan QuirozAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Unidad 1 - Paso 2 - Actividad Colaborativa 1Documento8 páginasGuia de Actividades y Rúbrica de Evaluación - Unidad 1 - Paso 2 - Actividad Colaborativa 1Unadista880Aún no hay calificaciones
- Jhonatan Quiroz Fase4 203039Documento20 páginasJhonatan Quiroz Fase4 203039Jhonatan QuirozAún no hay calificaciones
- 7.4.1 Packet Tracer - Implement DHCPv4 - ILMDocumento4 páginas7.4.1 Packet Tracer - Implement DHCPv4 - ILMJhonatan QuirozAún no hay calificaciones
- Manejo de Terneros PDFDocumento28 páginasManejo de Terneros PDFJuan Manuel Cabrales FloresAún no hay calificaciones
- Cuadro SinópticoDocumento1 páginaCuadro SinópticoJhonatan QuirozAún no hay calificaciones
- InfografiaDocumento3 páginasInfografiaJhonatan QuirozAún no hay calificaciones
- NOM 009 STPS 2011 Trabajos en AlturaDocumento55 páginasNOM 009 STPS 2011 Trabajos en AlturaJose de la PazAún no hay calificaciones
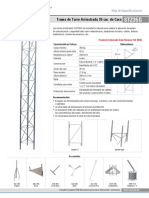
- Hoja de Especificaciones STZ35G Rev.001Documento1 páginaHoja de Especificaciones STZ35G Rev.001Jhonatan QuirozAún no hay calificaciones
- Soluciones Unidad 3Documento4 páginasSoluciones Unidad 3Jhonatan QuirozAún no hay calificaciones
- Foro Investigación Social AplicadaDocumento2 páginasForo Investigación Social AplicadaJhonatan QuirozAún no hay calificaciones
- Hoja de Especificaciones STZ35G REV 002 PDFDocumento1 páginaHoja de Especificaciones STZ35G REV 002 PDFJhonatan QuirozAún no hay calificaciones
- Que Es El StretchingDocumento9 páginasQue Es El StretchingOE CRAún no hay calificaciones
- Hoja de Especificaciones STZ35G REV 002 PDFDocumento1 páginaHoja de Especificaciones STZ35G REV 002 PDFJhonatan QuirozAún no hay calificaciones
- NOM 009 STPS 2011 Trabajos en AlturaDocumento55 páginasNOM 009 STPS 2011 Trabajos en AlturaJose de la PazAún no hay calificaciones
- Fase 1 - Reconocimiento de La Experiencia - Actividad en Línea (Quiz) CuestionarioDocumento5 páginasFase 1 - Reconocimiento de La Experiencia - Actividad en Línea (Quiz) CuestionarioJhonatan QuirozAún no hay calificaciones
- Payu - Cursos Gratuitos de Formación OnlineDocumento1 páginaPayu - Cursos Gratuitos de Formación OnlineJhonatan QuirozAún no hay calificaciones
- Cert 3457 03040 0020415 VersoDocumento1 páginaCert 3457 03040 0020415 VersoJhonatan QuirozAún no hay calificaciones
- Evaluación Acondicionamiento 2Documento3 páginasEvaluación Acondicionamiento 2Jhonatan QuirozAún no hay calificaciones
- Soluciones Unidad 3Documento4 páginasSoluciones Unidad 3Jhonatan QuirozAún no hay calificaciones
- Cordial SaludoDocumento1 páginaCordial SaludoJhonatan QuirozAún no hay calificaciones
- E3 DannyNietoDocumento18 páginasE3 DannyNietoJhonatan QuirozAún no hay calificaciones
- Plantilla ECBDocumento4 páginasPlantilla ECBJhonatan QuirozAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaJuan PavaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaJuan PavaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaJuan PavaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaJuan PavaAún no hay calificaciones
- Ejercicios Sobre Triángulos Rectángulos y OblicuángulosDocumento4 páginasEjercicios Sobre Triángulos Rectángulos y Oblicuángulosreynaldo felizAún no hay calificaciones
- 22i - Ee458n - Previo4 - Vilcapoma Aire MijailDocumento4 páginas22i - Ee458n - Previo4 - Vilcapoma Aire MijailMIJAIL VICTOR VILCAPOMA AIREAún no hay calificaciones
- Teorema de Derivación de LebesgueDocumento54 páginasTeorema de Derivación de Lebesgueanon_321523881Aún no hay calificaciones
- Trabajo Farmacotecnia 11Documento15 páginasTrabajo Farmacotecnia 11nallely julianny jaimess sanabriaAún no hay calificaciones
- Curvas Espirales de TransicionDocumento24 páginasCurvas Espirales de TransicionJESUS ROLANDO FIGUEROA CAMPANAAún no hay calificaciones
- Proyecto - MicroprocesadorDocumento15 páginasProyecto - MicroprocesadorRhanzes SifontesAún no hay calificaciones
- Teorema de Nyquist: Resumen: en El Siguiente Documento Determinaremos La Manera Correcta de Utilizar El Muestreo deDocumento6 páginasTeorema de Nyquist: Resumen: en El Siguiente Documento Determinaremos La Manera Correcta de Utilizar El Muestreo deJuan Fernando Córdova ArevaloAún no hay calificaciones
- Dibujo TecnicoDocumento11 páginasDibujo TecnicoOscar Gallegos100% (1)
- Neutrilización DefinitivaDocumento7 páginasNeutrilización DefinitivaMAYCOL ESTI VENAún no hay calificaciones
- Momento AngularDocumento4 páginasMomento AngularJuan Cruz GonzalezAún no hay calificaciones
- Practica 2do ParcialDocumento20 páginasPractica 2do ParcialAlvaroAntezana67% (3)
- Unidad #1 - Fisica - Magnitudes - UnidadesDocumento6 páginasUnidad #1 - Fisica - Magnitudes - UnidadesMarian ElizabethAún no hay calificaciones
- Balanceo Unidad IVDocumento10 páginasBalanceo Unidad IVFelipeCamachoIbarraAún no hay calificaciones
- 8 Densidad de RocasDocumento6 páginas8 Densidad de RocasAlex CalderonAún no hay calificaciones
- Teorema de Rolle y Valor Medio C-1Documento5 páginasTeorema de Rolle y Valor Medio C-1Anghie Khiabet100% (1)
- La Lógica ProposicionalDocumento5 páginasLa Lógica ProposicionalJacob SamudioAún no hay calificaciones
- Planificaciones Microcurriculares de Matemática para 3ro BGUDocumento36 páginasPlanificaciones Microcurriculares de Matemática para 3ro BGUMario Orlando Suárez Ibujés100% (2)
- Prueba Tercer Parcial - 1ro - Mate - 18 19Documento3 páginasPrueba Tercer Parcial - 1ro - Mate - 18 19Ricardo ChimbaAún no hay calificaciones
- Claves para Dimensionar Un Grupo Electrógeno - Sullair ArgentinaDocumento2 páginasClaves para Dimensionar Un Grupo Electrógeno - Sullair Argentinalalo_edu25Aún no hay calificaciones
- Teorema de ReciprocidadDocumento5 páginasTeorema de ReciprocidadMaricelaCrisMJAún no hay calificaciones
- Tarea 1 TrigonometriaDocumento6 páginasTarea 1 TrigonometriajesusAún no hay calificaciones
- Expresiones Algebraicas (1°parte)Documento5 páginasExpresiones Algebraicas (1°parte)Karina Patricia GorbaránAún no hay calificaciones
- Manual de FÃ - SicaDocumento50 páginasManual de FÃ - SicaIrasema AvendaňoAún no hay calificaciones
- Anexos ERPDocumento21 páginasAnexos ERPmdnrblsAún no hay calificaciones
- Uso - de - La - Calculadora - Casio FX 82 PDFDocumento8 páginasUso - de - La - Calculadora - Casio FX 82 PDFHector Vasquez SalinasAún no hay calificaciones
- Teoría - ProbabilidadDocumento42 páginasTeoría - ProbabilidadWalter SoraAún no hay calificaciones
- Prueba de GeometríaDocumento2 páginasPrueba de GeometríaHerminia Rios PinedaAún no hay calificaciones