También podría gustarte
- Evaluacion Modulo 10Documento6 páginasEvaluacion Modulo 10AndresAún no hay calificaciones
- Manual de Cierre y Apertura SIGESP - V2Documento25 páginasManual de Cierre y Apertura SIGESP - V2Alfredo José Palma75% (4)
- Analsis EstructuralDocumento2 páginasAnalsis EstructuralMaite MartinezAún no hay calificaciones
- Tarea FlexiónDocumento2 páginasTarea FlexiónMaite MartinezAún no hay calificaciones
- Ups - TTS219Documento124 páginasUps - TTS219Maite MartinezAún no hay calificaciones
- Gobierno Autónomo Descentralizado Ilustre Municipalidad Del Cantón DauleDocumento73 páginasGobierno Autónomo Descentralizado Ilustre Municipalidad Del Cantón DauleMaite MartinezAún no hay calificaciones
- 10ncee 000859Documento7 páginas10ncee 000859Maite MartinezAún no hay calificaciones
- Study of CoordinationDocumento33 páginasStudy of CoordinationMaite MartinezAún no hay calificaciones
- Unidad (2.4) Burnes - 2004 - Kurt Lewing and The Planned Approach To Change A Re-Appraisal - En.esDocumento26 páginasUnidad (2.4) Burnes - 2004 - Kurt Lewing and The Planned Approach To Change A Re-Appraisal - En.esMaite MartinezAún no hay calificaciones
- 7a.investigacion FormativaDocumento26 páginas7a.investigacion FormativaMaite MartinezAún no hay calificaciones
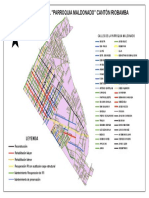
- Malla Vial 3 PDFDocumento1 páginaMalla Vial 3 PDFMaite MartinezAún no hay calificaciones
- 3 Intro T1P1 G3Documento2 páginas3 Intro T1P1 G3Maite MartinezAún no hay calificaciones
- Plan de Clase 4 - EA - BDocumento2 páginasPlan de Clase 4 - EA - BMaite MartinezAún no hay calificaciones
- Ups CT009556Documento158 páginasUps CT009556Maite MartinezAún no hay calificaciones
- Quispe MXR SDDocumento202 páginasQuispe MXR SDMaite MartinezAún no hay calificaciones
- 2616-Article Text-5698-2-10-20220131Documento6 páginas2616-Article Text-5698-2-10-20220131Maite MartinezAún no hay calificaciones
- Conectores A CorteDocumento25 páginasConectores A CorteMaite MartinezAún no hay calificaciones
- EVALUACIONESDocumento31 páginasEVALUACIONESMaite MartinezAún no hay calificaciones
- Analisis Unitario RitmicaDocumento4 páginasAnalisis Unitario RitmicaMaite MartinezAún no hay calificaciones
- Prueba Sumativa Del Segundo Parcial - Revisión Del IntentoDocumento7 páginasPrueba Sumativa Del Segundo Parcial - Revisión Del IntentoMaite MartinezAún no hay calificaciones
- Cat AgostoDocumento64 páginasCat AgostoMaite MartinezAún no hay calificaciones
- Gestion Integral de Residuos Solidos Urbanos Libro Aidis 67 76Documento10 páginasGestion Integral de Residuos Solidos Urbanos Libro Aidis 67 76Maite MartinezAún no hay calificaciones
- AsentamientosDocumento33 páginasAsentamientosMaite MartinezAún no hay calificaciones
- Tuberias de Cemento y AccesoriosDocumento12 páginasTuberias de Cemento y AccesoriosMaite MartinezAún no hay calificaciones
- 8B If2 Grupo1Documento13 páginas8B If2 Grupo1Maite MartinezAún no hay calificaciones
- Directrices Ayudantías de Cátedra 2021 - 2SDocumento3 páginasDirectrices Ayudantías de Cátedra 2021 - 2SMaite MartinezAún no hay calificaciones
- PreguntasDocumento269 páginasPreguntasMaite MartinezAún no hay calificaciones
- Consolidacion G1Documento16 páginasConsolidacion G1Maite MartinezAún no hay calificaciones
- InvetigacionDocumento2 páginasInvetigacionMaite MartinezAún no hay calificaciones
- Arquitectura Domótica e InmóticaDocumento10 páginasArquitectura Domótica e InmóticaEdward Aguirre Espíritu100% (1)
- Formato Veracidad Información Ficha Caracterización PadresDocumento2 páginasFormato Veracidad Información Ficha Caracterización PadresLeidy viviana Gil ramirezAún no hay calificaciones
- Arbol de FallasDocumento2 páginasArbol de FallasJosé ValdésAún no hay calificaciones
- Imagenes para Redes SocialesDocumento13 páginasImagenes para Redes SocialesDavid Miguel Herrera TenorioAún no hay calificaciones
- Aplicaciones Moviles Con KIVYDocumento15 páginasAplicaciones Moviles Con KIVYAlexander RamirezAún no hay calificaciones
- Comandos Punto 1Documento3 páginasComandos Punto 1Zabdiel MartinezAún no hay calificaciones
- Pa 2 Entrevista Asuc01595Documento3 páginasPa 2 Entrevista Asuc01595Pedro Valencia MelgarAún no hay calificaciones
- Caso - Enunciado 5Documento7 páginasCaso - Enunciado 5Antonio Rafael Suarezvargas0% (1)
- Experimento 2Documento3 páginasExperimento 2Ruben BarriaAún no hay calificaciones
- Informecerro VerdeDocumento10 páginasInformecerro VerdeRodrigo Torres CuadrosAún no hay calificaciones
- 2DOACTIDAD3Documento2 páginas2DOACTIDAD3juliana choque quispeAún no hay calificaciones
- Guia 8 TeleDocumento6 páginasGuia 8 Teleana maria ramirez garciaAún no hay calificaciones
- Etapas Del Proyecto ArquitectonicoDocumento2 páginasEtapas Del Proyecto ArquitectonicoLily ZambranoAún no hay calificaciones
- El Pedido de Una Computadora Personal Digital Puede Especificar Uno de Cinco Tamaños de MemoriaDocumento2 páginasEl Pedido de Una Computadora Personal Digital Puede Especificar Uno de Cinco Tamaños de MemoriaJesus Garcia HernandezAún no hay calificaciones
- VRRPDocumento3 páginasVRRPdanilo ortizAún no hay calificaciones
- Evolución Del MicrocontroladorDocumento25 páginasEvolución Del MicrocontroladorOscar HdezAún no hay calificaciones
- ESTRATEGIA Caso EnunciadoDocumento4 páginasESTRATEGIA Caso EnunciadoDiana AlvarezAún no hay calificaciones
- Formulacion de Estrategia - SaludDocumento22 páginasFormulacion de Estrategia - SaludrberrospiAún no hay calificaciones
- Representación Gráfica de Un Fractal en El MathematicaDocumento14 páginasRepresentación Gráfica de Un Fractal en El MathematicaDaniel MontenegroAún no hay calificaciones
- Semana10 Estadística Aplicada Regresión Modelos 2017 IDocumento21 páginasSemana10 Estadística Aplicada Regresión Modelos 2017 Ileonidas molinaAún no hay calificaciones
- Proyección de Planta FotovoltaicaDocumento62 páginasProyección de Planta FotovoltaicaJuan Esteban100% (1)
- Ejemplos - Sistema ScadaDocumento22 páginasEjemplos - Sistema ScadaFlavio AlxAún no hay calificaciones
- Desarrollando La Creapptividad 1Documento16 páginasDesarrollando La Creapptividad 1María RojasAún no hay calificaciones
- 13.3.2.5 Lab - Configure Windows Local Security Policy 2020-10610Documento4 páginas13.3.2.5 Lab - Configure Windows Local Security Policy 2020-10610Patax HabaneraAún no hay calificaciones
- Identificación de ProcesosDocumento4 páginasIdentificación de ProcesosAlexanderAún no hay calificaciones
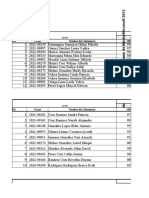
- Integracion de Notas GENERAL 2022Documento80 páginasIntegracion de Notas GENERAL 2022carlos juarezAún no hay calificaciones
- Posturograma (Antropometrics)Documento7 páginasPosturograma (Antropometrics)MrJeisson93Aún no hay calificaciones
- Formato Taller-Electronica Basica y ObdiiDocumento39 páginasFormato Taller-Electronica Basica y ObdiiMiguel CruzAún no hay calificaciones