También podría gustarte
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- Grupo 7 - Mapeos ConformesDocumento24 páginasGrupo 7 - Mapeos ConformesLeonardo OréAún no hay calificaciones
- Ejercicio Paso3Documento16 páginasEjercicio Paso3Luis Enrique Mendez ReinaAún no hay calificaciones
- Ayudant A IIIDocumento5 páginasAyudant A IIIValentina Moreno VegaAún no hay calificaciones
- Clase 2 2 CoeficientesDocumento5 páginasClase 2 2 CoeficientesDaniel PinzonAún no hay calificaciones
- PES - Cálculo Avanzado (2009-2)Documento5 páginasPES - Cálculo Avanzado (2009-2)Camila Retamal ValenzuelaAún no hay calificaciones
- Pauta Control Recuperativo EDO202210Documento6 páginasPauta Control Recuperativo EDO202210ada adadAún no hay calificaciones
- Analisis Mat. III, Unidad IIDocumento32 páginasAnalisis Mat. III, Unidad IIBruno GuizzoAún no hay calificaciones
- Ayudant A VDocumento3 páginasAyudant A VValentina Moreno VegaAún no hay calificaciones
- Tarea Nº01 de MA185ODocumento22 páginasTarea Nº01 de MA185OEnzo AricaAún no hay calificaciones
- Transformación ConformeDocumento25 páginasTransformación ConformeInes BenenciaAún no hay calificaciones
- 3 MapeosDocumento17 páginas3 MapeosErick Gonzalo Sahuaraura Escobar100% (2)
- PES - Cálculo Avanzado (2010)Documento4 páginasPES - Cálculo Avanzado (2010)Camila Retamal ValenzuelaAún no hay calificaciones
- Super Pack Cálculo Vectorial 2021Documento132 páginasSuper Pack Cálculo Vectorial 2021Luis ValdezAún no hay calificaciones
- Examen Tema 1 Op. 1Documento5 páginasExamen Tema 1 Op. 1Pablo Huerta iFunyAún no hay calificaciones
- Variable AusenteDocumento2 páginasVariable AusenteWendyAún no hay calificaciones
- Undad - 2 Transformaciones y MapeoDocumento3 páginasUndad - 2 Transformaciones y MapeoAldana LaciarAún no hay calificaciones
- C3. Funciones de Variable Compleja. Mapeo BilinealDocumento5 páginasC3. Funciones de Variable Compleja. Mapeo BilinealYaniel LeliebreAún no hay calificaciones
- Cl3-02. Inyectividad, Sobreyectividad, Composición e Inversa - Álgebra LinealDocumento5 páginasCl3-02. Inyectividad, Sobreyectividad, Composición e Inversa - Álgebra LinealBryanAún no hay calificaciones
- 0 9pandeoDocumento17 páginas0 9pandeoRoberto CarlosAún no hay calificaciones
- Resumen de SuperficiesDocumento2 páginasResumen de SuperficiesJohn Fernando Mora CarrilloAún no hay calificaciones
- Soluciones de Los Ejercicios de Autoevaluación Tema 4Documento6 páginasSoluciones de Los Ejercicios de Autoevaluación Tema 4Miguel GlezAún no hay calificaciones
- PEP 1 - Cálculo Avanzado (2009-2)Documento5 páginasPEP 1 - Cálculo Avanzado (2009-2)Camila Retamal ValenzuelaAún no hay calificaciones
- Solucion 1P-IIC2018Documento6 páginasSolucion 1P-IIC2018Gabriel BriceñoAún no hay calificaciones
- Ejercicios 3Documento6 páginasEjercicios 3José Roberto Arenas FloresAún no hay calificaciones
- PES - Cálculo Avanzado (2010-2)Documento5 páginasPES - Cálculo Avanzado (2010-2)Camila Retamal ValenzuelaAún no hay calificaciones
- Transformaciones Fraccionarias Lineales o de Möbius (Autoguardado)Documento20 páginasTransformaciones Fraccionarias Lineales o de Möbius (Autoguardado)Brandon RH ErickBraddAún no hay calificaciones
- Mtse U3 A1 IvvhDocumento8 páginasMtse U3 A1 IvvhIvan VargasAún no hay calificaciones
- NumeroscomplejosDocumento42 páginasNumeroscomplejosJuan Sebastian Aguiar CatrillonAún no hay calificaciones
- Solucionario 1era Practica - 2005-3Documento11 páginasSolucionario 1era Practica - 2005-3Jorge Antonio CastilloAún no hay calificaciones
- (IM0307) PruebaCorta 02 Enunciado y SolucionDocumento3 páginas(IM0307) PruebaCorta 02 Enunciado y SolucionMaria GarciaAún no hay calificaciones
- Integración de EDPDocumento4 páginasIntegración de EDPGisela Ayelen TorresAún no hay calificaciones
- Diap 77-85 CIV-229 2-2021Documento9 páginasDiap 77-85 CIV-229 2-2021tommy flores choqueAún no hay calificaciones
- Ayudant A IV SolucionesDocumento3 páginasAyudant A IV SolucionesValentina Moreno VegaAún no hay calificaciones
- ED de BernoulliDocumento2 páginasED de BernoulliRODRIGO SHUPINAGWUAAún no hay calificaciones
- Modelo de Primer Parcial - para Practicar - ResueltoDocumento4 páginasModelo de Primer Parcial - para Practicar - ResueltojcoderwordsAún no hay calificaciones
- Guia Unidad 2 Mapeo y TransformacionesDocumento3 páginasGuia Unidad 2 Mapeo y TransformacionesRuza LarsenAún no hay calificaciones
- Zurita Victor EDO PUDocumento32 páginasZurita Victor EDO PUpepeAún no hay calificaciones
- Integral EsDocumento2 páginasIntegral EsscamwindowsAún no hay calificaciones
- Taller Repaso (31 05 2022)Documento3 páginasTaller Repaso (31 05 2022)Juan GiraldoAún no hay calificaciones
- Mpi 2 - Sol Sem 13 PDFDocumento8 páginasMpi 2 - Sol Sem 13 PDFleslieAún no hay calificaciones
- Clase Vectores 4Documento11 páginasClase Vectores 4Maria del Pilar Castro SoriaAún no hay calificaciones
- Pauta Control - 2Documento6 páginasPauta Control - 2Diego Francisco Brion OrellanaAún no hay calificaciones
- 2021 05 20 - Clase No. 40 - GeoNDocumento8 páginas2021 05 20 - Clase No. 40 - GeoNPaul MenciasAún no hay calificaciones
- TrabajoDocumento10 páginasTrabajoCarbone LuisAún no hay calificaciones
- Material DidácticoDocumento7 páginasMaterial DidácticotefAún no hay calificaciones
- Pauta 7 - (E.D. de Primer Orden y Aplicaciones, Cambioes de Variables)Documento3 páginasPauta 7 - (E.D. de Primer Orden y Aplicaciones, Cambioes de Variables)Yerald & claudiaAún no hay calificaciones
- Seminario Dinámica PC1 2024-1Documento21 páginasSeminario Dinámica PC1 2024-1Luisoc 1710Aún no hay calificaciones
- ORDINARIASDocumento14 páginasORDINARIASSteven López ValverdeAún no hay calificaciones
- EJERCICIOS 2 Ecuaciones HomogeneasDocumento8 páginasEJERCICIOS 2 Ecuaciones HomogeneasDajathAún no hay calificaciones
- Geometría AnalíticaDocumento2 páginasGeometría AnalíticaRafaa GleezAún no hay calificaciones
- Tarea 3 - Nestor Eliecer CepedaDocumento7 páginasTarea 3 - Nestor Eliecer CepedaMiguel Angel Mendigaño ArismendyAún no hay calificaciones
- Lista1 I 2016 MA 1005Documento20 páginasLista1 I 2016 MA 1005alexAún no hay calificaciones
- Ejercicios 1.2Documento2 páginasEjercicios 1.2edgar fareloAún no hay calificaciones
- U32 - Bases y Dimension (Capsula) BDocumento3 páginasU32 - Bases y Dimension (Capsula) Balmendra4943Aún no hay calificaciones
- Tabla de Ecuaciones Diferenciales OrdinariasDocumento6 páginasTabla de Ecuaciones Diferenciales OrdinariasGabriel De AbreuAún no hay calificaciones
- Formulario Ecuaciones Diferenciales Primer ParcialDocumento4 páginasFormulario Ecuaciones Diferenciales Primer ParcialJhazmani A. LlanosAún no hay calificaciones
- Aplicaciones de La Diferenciación en Variable ComplejaDocumento1 páginaAplicaciones de La Diferenciación en Variable ComplejaDiego CegarraAún no hay calificaciones
- AC Numeros ComplejosDocumento14 páginasAC Numeros ComplejospaulaAún no hay calificaciones
- Estadio DeportvoDocumento5 páginasEstadio DeportvoluisAún no hay calificaciones
- Aula Tipo 2 LED LuchiDocumento16 páginasAula Tipo 2 LED LuchiluisAún no hay calificaciones
- PasilloDocumento15 páginasPasilloluisAún no hay calificaciones
- Almacen LuchiDocumento14 páginasAlmacen LuchiluisAún no hay calificaciones
- Aula Tipo 1 LED LuchiDocumento15 páginasAula Tipo 1 LED LuchiluisAún no hay calificaciones
- Pregunta 3 AMPLIDINADocumento4 páginasPregunta 3 AMPLIDINAluisAún no hay calificaciones
- Maxima Demanda ViviendaDocumento20 páginasMaxima Demanda Viviendaluis100% (1)
- Habla - Jaime Lértora ResumenDocumento9 páginasHabla - Jaime Lértora ResumenJhonContreras80% (5)
- Rectificadores NO Controlados PDFDocumento84 páginasRectificadores NO Controlados PDFJohn Milton Ascencio QuispeAún no hay calificaciones
- Tabla PeriodicaDocumento3 páginasTabla PeriodicaluisAún no hay calificaciones
- Pexperiencia # 1-ADocumento3 páginasPexperiencia # 1-AluisAún no hay calificaciones
- Rectificadores NO Controlados PDFDocumento84 páginasRectificadores NO Controlados PDFJohn Milton Ascencio QuispeAún no hay calificaciones
- 4° año-ACTIVID 03 - EXP05-C y TDocumento5 páginas4° año-ACTIVID 03 - EXP05-C y TluisAún no hay calificaciones
- Enlace QuimicoDocumento42 páginasEnlace QuimicoluisAún no hay calificaciones
- Universidad Nacional de Ingeniería: Maquinas Electricas Ii EE-214MDocumento1 páginaUniversidad Nacional de Ingeniería: Maquinas Electricas Ii EE-214MluisAún no hay calificaciones
- Ejercicios y Problemas de Conversión Electromecánica de EnergíaDocumento12 páginasEjercicios y Problemas de Conversión Electromecánica de EnergíaluisAún no hay calificaciones
- 18 1Documento5 páginas18 1luisAún no hay calificaciones
- 1barja EE363N Ex Final 2Documento2 páginas1barja EE363N Ex Final 2luisAún no hay calificaciones
- Fijas 3 PCDocumento29 páginasFijas 3 PCluisAún no hay calificaciones
- Pract 3 EE411Q SolucionDocumento8 páginasPract 3 EE411Q SolucionluisAún no hay calificaciones
- 3era Plancha de DisposDocumento6 páginas3era Plancha de DisposluisAún no hay calificaciones
- Amp BJTCCDocumento3 páginasAmp BJTCCluisAún no hay calificaciones
- Arias 1Documento4 páginasArias 1luisAún no hay calificaciones
- Ga 9Documento5 páginasGa 9luisAún no hay calificaciones
- Aea PDFDocumento1 páginaAea PDFluisAún no hay calificaciones
- Ra2 PDFDocumento2 páginasRa2 PDFluisAún no hay calificaciones
- Ga 4Documento2 páginasGa 4luisAún no hay calificaciones
- Aea PDFDocumento1 páginaAea PDFluisAún no hay calificaciones
- Carga y Descarga de Un Circuito RC PDFDocumento1 páginaCarga y Descarga de Un Circuito RC PDFluisAún no hay calificaciones
- Estructura Monografia Inv PDFDocumento1 páginaEstructura Monografia Inv PDFJoel MenaAún no hay calificaciones
- Examen TeoricoDocumento2 páginasExamen TeoricoRicardo OlmedoAún no hay calificaciones
- Control de Calidad en Mantenimiento.1Documento31 páginasControl de Calidad en Mantenimiento.1Jorge AmayaAún no hay calificaciones
- Karcher K5Documento6 páginasKarcher K5Juan Carlos AlmendrasAún no hay calificaciones
- Taller 39 Impulso y Cantidad de MovimientoDocumento2 páginasTaller 39 Impulso y Cantidad de MovimientoAlison BernaAún no hay calificaciones
- Guia de Laboratorio EE442 v22Documento32 páginasGuia de Laboratorio EE442 v22ROBERTO CARLOS MARTINEZ HUAMANAún no hay calificaciones
- Canal CircularDocumento3 páginasCanal CircularFernando YañezAún no hay calificaciones
- Informe 5Documento8 páginasInforme 5Jorge Chalco MHAún no hay calificaciones
- Examen 3 PLC1Documento8 páginasExamen 3 PLC1anthony3alvarez3ovieAún no hay calificaciones
- PRATICA CALIFICADA - DilatacionDocumento2 páginasPRATICA CALIFICADA - DilatacionAndre Bryam CcoicaAún no hay calificaciones
- Equivalente de Arena-CapilaridadDocumento9 páginasEquivalente de Arena-CapilaridadHeber ApazaAún no hay calificaciones
- Ejercicio Lineas ParaleloDocumento3 páginasEjercicio Lineas ParaleloANGEL CRUZAún no hay calificaciones
- Memoria de Calculo Vivienda UnifamiliarDocumento25 páginasMemoria de Calculo Vivienda UnifamiliarChayo Guima80% (5)
- Caracterísiticas de Los Fluidos RealesDocumento4 páginasCaracterísiticas de Los Fluidos RealesDavidAún no hay calificaciones
- Para Calculo de Conductoeres y TuberiasDocumento21 páginasPara Calculo de Conductoeres y TuberiasantonioAún no hay calificaciones
- Caida LibreDocumento3 páginasCaida LibreRommel RiscoAún no hay calificaciones
- Guia de Impresion Preliminar y VaciadoDocumento13 páginasGuia de Impresion Preliminar y VaciadoFernanda LassoAún no hay calificaciones
- El Punto y La Recta en El EspacioDocumento57 páginasEl Punto y La Recta en El EspacioCindyRodriguezQAún no hay calificaciones
- Msud Msud-506 FormatoalumnotrabajofinalDocumento8 páginasMsud Msud-506 FormatoalumnotrabajofinalJair LimaAún no hay calificaciones
- Luminarias Led Intelux 2019Documento21 páginasLuminarias Led Intelux 2019Julio César MirandaAún no hay calificaciones
- Laboratorio Trabajo NDocumento9 páginasLaboratorio Trabajo NJORGE JOEL CARREÑO QUINOAún no hay calificaciones
- Empuje de Gas Disuelto LiberadoDocumento1 páginaEmpuje de Gas Disuelto LiberadoMaJoseeCastroHAún no hay calificaciones
- Vida Util - Requena PDFDocumento10 páginasVida Util - Requena PDFSantos Abarca LarcaAún no hay calificaciones
- Instalaciones Eléctricas InterioresDocumento47 páginasInstalaciones Eléctricas InterioresStephano DíazAún no hay calificaciones
- Manual Ley de Senos y CosenosDocumento5 páginasManual Ley de Senos y CosenosArturo T Medina0% (1)
- GLD 011 Health TRADDocumento8 páginasGLD 011 Health TRADJoséAún no hay calificaciones
- EVERGARAY Cuestionario3er ParcialDocumento12 páginasEVERGARAY Cuestionario3er ParcialMaria Perez0% (1)
- Reflexión, Refracción y DifracciónDocumento34 páginasReflexión, Refracción y Difracciónnano261191Aún no hay calificaciones
- Unidad 1 R.A. 1.2 AfeoDocumento7 páginasUnidad 1 R.A. 1.2 AfeoElsa RiosAún no hay calificaciones
- Fibra de CarbonoDocumento9 páginasFibra de Carbonopedro gonzalesAún no hay calificaciones
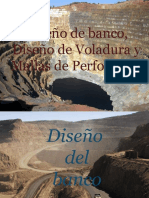
- Diseño de BancoDocumento46 páginasDiseño de Bancovalentina javiera100% (1)