También podría gustarte
- Masa Resorte AmortiguadorDocumento11 páginasMasa Resorte AmortiguadorTom Sawyer MarkAún no hay calificaciones
- Practica 1Documento6 páginasPractica 1Tom Sawyer MarkAún no hay calificaciones
- Interferometría Con Haces GaussianosDocumento56 páginasInterferometría Con Haces GaussianosTom Sawyer MarkAún no hay calificaciones
- Filtros Activos PDFDocumento11 páginasFiltros Activos PDFTom Sawyer MarkAún no hay calificaciones
- Medición de La Cintura de Un Haz de LuzDocumento4 páginasMedición de La Cintura de Un Haz de LuzTom Sawyer MarkAún no hay calificaciones
- Péndulo Invertido en Espacio de EstadosDocumento14 páginasPéndulo Invertido en Espacio de EstadosTom Sawyer Mark0% (1)
- Yalitza Mamani MuñozDocumento3 páginasYalitza Mamani MuñozYalitza Mamani MuñozAún no hay calificaciones
- SESIÓN DE APRENDIZAJ #1 - 3 Y 4 Grado - I - EADocumento4 páginasSESIÓN DE APRENDIZAJ #1 - 3 Y 4 Grado - I - EAgaby sotoAún no hay calificaciones
- Arte Y Geometría. Carl Andre: Dibujo Técnico. Grado en Bellas Artes Y Diseño Jorge VarasDocumento11 páginasArte Y Geometría. Carl Andre: Dibujo Técnico. Grado en Bellas Artes Y Diseño Jorge VarasLuiiz C.A.Aún no hay calificaciones
- Manual de Normativas de DibujoDocumento8 páginasManual de Normativas de Dibujoivan chavezAún no hay calificaciones
- Hoja - de - Vida CaterynDocumento3 páginasHoja - de - Vida CaterynIvan Ivan RaggamuffinAún no hay calificaciones
- 1.4 Orientación Al MercadoDocumento4 páginas1.4 Orientación Al MercadoLily Estrada100% (2)
- MONOGRAFIA Casos de Bullyng en El Colegio Luis Espinal CampsDocumento21 páginasMONOGRAFIA Casos de Bullyng en El Colegio Luis Espinal CampsAngel MphAún no hay calificaciones
- Trabajo Final 2 Caso Practico SecadoDocumento7 páginasTrabajo Final 2 Caso Practico SecadoGagomaaxAún no hay calificaciones
- Test de La Casa Leccion 7 El Piso o SueloDocumento4 páginasTest de La Casa Leccion 7 El Piso o SueloBen Gtz.Aún no hay calificaciones
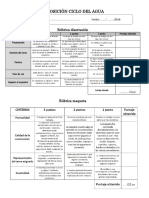
- Rubrica Ciclo Del AguaDocumento1 páginaRubrica Ciclo Del Aguaangmil0% (1)
- La Falsa Filosofía o El Ateísmo Deismo PDFDocumento457 páginasLa Falsa Filosofía o El Ateísmo Deismo PDFRichard Cabezas SuarezAún no hay calificaciones
- Aspectos de ÉticaDocumento7 páginasAspectos de ÉticaFranklin ZeladaAún no hay calificaciones
- Margy Julieth Sanabria LozanoDocumento10 páginasMargy Julieth Sanabria LozanoYomar Alberto Parra ForeroAún no hay calificaciones
- Cuestionario de Repaso - 2da. Evaluación Parcial - EVA - Art - III - 2020 - 2Documento10 páginasCuestionario de Repaso - 2da. Evaluación Parcial - EVA - Art - III - 2020 - 2Katherine De La Cruz NuñezAún no hay calificaciones
- La Quinta DisciplinaDocumento5 páginasLa Quinta DisciplinaGuido MuchiuttiAún no hay calificaciones
- Tipicidad, Moises ZeladaDocumento9 páginasTipicidad, Moises ZeladaVITALINA ORELLANA Y ORELLANAAún no hay calificaciones
- S Principios Quimicos 780Documento28 páginasS Principios Quimicos 780Peter Johan Jaime HernándezAún no hay calificaciones
- Mendigo Ladron Guerrero y ReyDocumento11 páginasMendigo Ladron Guerrero y ReyRaulAlvarezAún no hay calificaciones
- AtletismoDocumento25 páginasAtletismoserviciosimedyilAún no hay calificaciones
- Técnicas de Recolección de Datos en Entornos Virtuales Más Usadas en La Investigación CualitativaDocumento3 páginasTécnicas de Recolección de Datos en Entornos Virtuales Más Usadas en La Investigación CualitativaCarlos Lopez MendizabalAún no hay calificaciones
- Alquimia Política ENCÍCLICA SOCIALISTA 2020Documento8 páginasAlquimia Política ENCÍCLICA SOCIALISTA 2020Ramón AzócarAún no hay calificaciones
- Tipos de Empresas en ColombiaDocumento2 páginasTipos de Empresas en ColombiaLuz JaraAún no hay calificaciones
- Template MA 1er 2018 VF PDFDocumento262 páginasTemplate MA 1er 2018 VF PDFPako maikAún no hay calificaciones
- Tipos de Plásticos para Invernaderos y EstabilizadoresDocumento4 páginasTipos de Plásticos para Invernaderos y EstabilizadoresAlan Ramos100% (2)
- Carencias Nutricionales en Cítricos - Síntomas y CorrecciónDocumento9 páginasCarencias Nutricionales en Cítricos - Síntomas y CorrecciónslugmotionAún no hay calificaciones
- Elasticidad Teo-ProblemasDocumento5 páginasElasticidad Teo-ProblemasFelipe SabelotoAún no hay calificaciones
- Comunicado Elecciones2013Documento1 páginaComunicado Elecciones2013Colegio de Profesores del PerúAún no hay calificaciones
- Inter Consult A Medico PsiDocumento6 páginasInter Consult A Medico PsiperonezaAún no hay calificaciones
- INDURA Ni 99 (Versión Español)Documento2 páginasINDURA Ni 99 (Versión Español)Leon CardenasAún no hay calificaciones
- Fito Glicósidos Antracénicos 2019-03Documento32 páginasFito Glicósidos Antracénicos 2019-03BranEstivenGomezAún no hay calificaciones