También podría gustarte
- Expansión de Un Gas Ideal Contra Un ResorteDocumento3 páginasExpansión de Un Gas Ideal Contra Un ResorteAlex Yoel Luna100% (2)
- Gestión de Equipo Pesado en MineríaDocumento47 páginasGestión de Equipo Pesado en MineríaAlex Yoel Luna100% (1)
- Calculos para Scooptram y Combinacion LHD Con DumperDocumento9 páginasCalculos para Scooptram y Combinacion LHD Con DumperJuan Miguel Gómez AlvarezAún no hay calificaciones
- DumpersDocumento16 páginasDumpersAlex Yoel Luna100% (2)
- Guia Aprendizaje Numeros DecimalesDocumento7 páginasGuia Aprendizaje Numeros DecimalesJosé Miguel Riquelme Villarroel100% (1)
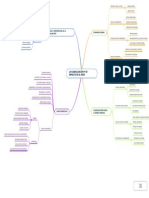
- La Globalización y Su Impacto en El Perú - Mind MapDocumento1 páginaLa Globalización y Su Impacto en El Perú - Mind MapAlex Yoel LunaAún no hay calificaciones
- Nom 018 STPS 2015Documento15 páginasNom 018 STPS 2015manuel_santillan100% (12)
- Economia Minera Clase IDocumento23 páginasEconomia Minera Clase IAlex Yoel Luna100% (1)
- Kabash 0Documento23 páginasKabash 0Manuel Basto100% (1)
- PDC Hualgayoc Bambamarca Al 2021Documento140 páginasPDC Hualgayoc Bambamarca Al 2021Alex Yoel Luna100% (1)
- Manual Optimizacion Costos Operacion Scooptrams Mina SubterraneaDocumento190 páginasManual Optimizacion Costos Operacion Scooptrams Mina SubterraneaAlex Yoel Luna100% (1)
- Yacimientos Tipo SkarnDocumento37 páginasYacimientos Tipo SkarnRandy Minaya BottoniAún no hay calificaciones
- Yacimientos Epitermales de Baja SulfuraciónDocumento14 páginasYacimientos Epitermales de Baja SulfuraciónAlex Yoel LunaAún no hay calificaciones
- Estructuras y Vias TerrestresDocumento21 páginasEstructuras y Vias TerrestresJesamar Mejias0% (1)
- Crisis FinancieraDocumento28 páginasCrisis FinancieraAlex Yoel LunaAún no hay calificaciones
- Señalizaciones La DescubridoraDocumento60 páginasSeñalizaciones La DescubridoraAlex Yoel LunaAún no hay calificaciones
- Gasimetria ArterialDocumento41 páginasGasimetria ArterialAlex Yoel LunaAún no hay calificaciones
- Yacimientos Tipo Vms Final IDocumento5 páginasYacimientos Tipo Vms Final IAlex Yoel LunaAún no hay calificaciones
- Reglamento de Plan de Cierre de MinasDocumento12 páginasReglamento de Plan de Cierre de MinasAlex Yoel LunaAún no hay calificaciones
- Yacimientos Tipo Vms Final IIIDocumento17 páginasYacimientos Tipo Vms Final IIIAlex Yoel LunaAún no hay calificaciones
- Formato de Información para Trabajos en CoautoríaDocumento1 páginaFormato de Información para Trabajos en CoautoríaAlex Yoel LunaAún no hay calificaciones
- Formato Investigación TeóricaDocumento17 páginasFormato Investigación TeóricaAlex Yoel LunaAún no hay calificaciones
- Formato de Proyecto de TesisDocumento8 páginasFormato de Proyecto de TesisAlex Yoel LunaAún no hay calificaciones
- Control de Maquinas ElectricasDocumento3 páginasControl de Maquinas ElectricasAlfredo RodriguezAún no hay calificaciones
- Metodos de Diagnostico y ControlDocumento18 páginasMetodos de Diagnostico y ControlNatalia Castellanos CoteAún no hay calificaciones
- Leyes de Proporciones DefinidasDocumento4 páginasLeyes de Proporciones Definidaslaura mogollonAún no hay calificaciones
- 12pf - La Colina Del AulladorDocumento18 páginas12pf - La Colina Del AulladorPedro NanieroAún no hay calificaciones
- ESTUDIO DEL CASO Actividad OA 3 CARLOS H SANCHEZ APRENDIZDocumento4 páginasESTUDIO DEL CASO Actividad OA 3 CARLOS H SANCHEZ APRENDIZCarlos SanchezAún no hay calificaciones
- "Consorcio Colcabamba": Informe de Capacitación en Educación Sanitaria para Familias y JASS en La ObraDocumento24 páginas"Consorcio Colcabamba": Informe de Capacitación en Educación Sanitaria para Familias y JASS en La ObraRobinson Aponte SierraAún no hay calificaciones
- Cambio ClimaticoDocumento9 páginasCambio Climaticomatt scAún no hay calificaciones
- Describir Brevemente Cómo Funcionan Los Protocolos HTTPDocumento4 páginasDescribir Brevemente Cómo Funcionan Los Protocolos HTTPElizabeth BolañezAún no hay calificaciones
- Trabajo Colaborativo FinalDocumento20 páginasTrabajo Colaborativo Finalluis barretoAún no hay calificaciones
- Entes Reguladores (BCR, SBS, SMV)Documento26 páginasEntes Reguladores (BCR, SBS, SMV)Delia CvAún no hay calificaciones
- InstruccionesDocumento14 páginasInstruccionesMarcos Luis Garcia BaqueAún no hay calificaciones
- Ejercicios Formulaciã N PDFDocumento5 páginasEjercicios Formulaciã N PDFÁngel CisséAún no hay calificaciones
- Issn:: Ingeniería Industrial. Actualidad y Nuevas Tendencias 1856-8327 Universidad de Carabobo VenezuelaDocumento13 páginasIssn:: Ingeniería Industrial. Actualidad y Nuevas Tendencias 1856-8327 Universidad de Carabobo VenezuelaRenzo SullcaAún no hay calificaciones
- Actividad Semana 4 CGFCCXCVDSGFJFDocumento7 páginasActividad Semana 4 CGFCCXCVDSGFJFLeonardo SantosAún no hay calificaciones
- Presentación de PowerPointDocumento15 páginasPresentación de PowerPointRosa BenavidesAún no hay calificaciones
- Plano Predial de Valores Arancelarios de Terrenos Urbanos: UbicaciónDocumento1 páginaPlano Predial de Valores Arancelarios de Terrenos Urbanos: Ubicaciónadela romanAún no hay calificaciones
- Herramientaspara La ConstruccionDocumento18 páginasHerramientaspara La ConstruccionMartha AngelesAún no hay calificaciones
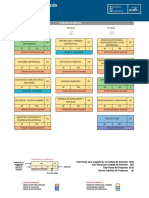
- MBA UDLA MallaDocumento1 páginaMBA UDLA MallaDanes Vinicio Reyes RoseroAún no hay calificaciones
- Glosario GeológicoDocumento95 páginasGlosario GeológicoElvia GarciaAún no hay calificaciones
- Parcial-Aproximaciones A Una Historia Del Estado ArgentinoDocumento3 páginasParcial-Aproximaciones A Una Historia Del Estado ArgentinoCarolina Fabiana MaisonAún no hay calificaciones
- Solucionario A-B Vachimed ExclusivoDocumento8 páginasSolucionario A-B Vachimed ExclusivoJonathan VachimedAún no hay calificaciones
- Practica 3Documento10 páginasPractica 3Fernanda SorianoAún no hay calificaciones
- LOSARTAMDocumento9 páginasLOSARTAMHilda CMAún no hay calificaciones
- Toma de ApuntesDocumento3 páginasToma de ApuntesRubenCalle100% (2)
- Reperotrio RosaDocumento23 páginasReperotrio Rosamanuel angel romero roaAún no hay calificaciones
- Intermodalismo 4Documento13 páginasIntermodalismo 4martha orozcoAún no hay calificaciones