También podría gustarte
- CombinatoriaDocumento2 páginasCombinatoriaFabricioAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- INSTRUMENTACIÓN Fis 200Documento6 páginasINSTRUMENTACIÓN Fis 200omarAún no hay calificaciones
- Colque Ovidio Ing. Civil: TacuñaDocumento135 páginasColque Ovidio Ing. Civil: TacuñaDamaris Maya Diaz VelasquezAún no hay calificaciones
- Ecuas Tomo IDocumento51 páginasEcuas Tomo ICristianrojaschambi ChispassAún no hay calificaciones
- Fis200 Examen Aux InviernoDocumento3 páginasFis200 Examen Aux InviernoEduardo Manuel Saavedra LizarazúAún no hay calificaciones
- Fis200 Examen Final SolucionarioDocumento2 páginasFis200 Examen Final SolucionarioWILLY Condori NinaAún no hay calificaciones
- FormularioDocumento4 páginasFormularioJosi PayeAún no hay calificaciones
- Informe Laboratorio de Fisica 2da Ley de NewtonDocumento12 páginasInforme Laboratorio de Fisica 2da Ley de NewtonEinar M. IbarraAún no hay calificaciones
- Cuestionario Laboratorio 7Documento6 páginasCuestionario Laboratorio 7Alvaro Razim Arce DelgadilloAún no hay calificaciones
- Formulario para Calcuo 2 UmsaDocumento2 páginasFormulario para Calcuo 2 UmsaNoel Angel Leon TiconaAún no hay calificaciones
- QMC-1100 Lab N°7Documento14 páginasQMC-1100 Lab N°7Nsisnsin NwiwnsbdbAún no hay calificaciones
- 02 - Leyes de KirchhoffDocumento6 páginas02 - Leyes de KirchhoffGregory AntonioAún no hay calificaciones
- Varias Variables PDFDocumento83 páginasVarias Variables PDFAlberto Cortes100% (1)
- Calderon Aruquipa Rodrigo - Inf - 7 - Colisiones - en - Una - DimensionDocumento12 páginasCalderon Aruquipa Rodrigo - Inf - 7 - Colisiones - en - Una - DimensionArata KazugaAún no hay calificaciones
- For 2P (Mat-207) PDFDocumento2 páginasFor 2P (Mat-207) PDFAnaAún no hay calificaciones
- Formulario Segundo Parcial (Mat-101)Documento3 páginasFormulario Segundo Parcial (Mat-101)Fabian VargasAún no hay calificaciones
- Práctica 2 - Geometria Analitica en El EspacioDocumento8 páginasPráctica 2 - Geometria Analitica en El EspacioRosa Iriondo MendezAún no hay calificaciones
- Movimiento de Electrones FIS 200Documento6 páginasMovimiento de Electrones FIS 200Carlos Cuentas PazAún no hay calificaciones
- Dispen QMC I 2018Documento4 páginasDispen QMC I 2018Nina Yujra Ramiro100% (1)
- 5segunda Ley de NewtonDocumento14 páginas5segunda Ley de NewtonAlvaroAntezanaAún no hay calificaciones
- Ejercicios Conservacion de La EnergiaDocumento2 páginasEjercicios Conservacion de La EnergiaAriel Villarroel Romano0% (1)
- Informe de Física 3Documento12 páginasInforme de Física 3DanielAún no hay calificaciones
- Solucionario Mat 207 - Primer ParcialDocumento5 páginasSolucionario Mat 207 - Primer ParcialGuadalupe Callisaya100% (1)
- Formulario Segundo Parcial (Mat-207)Documento4 páginasFormulario Segundo Parcial (Mat-207)Javier MillerAún no hay calificaciones
- Formulario de Segundo Parcial Algebra LinealDocumento3 páginasFormulario de Segundo Parcial Algebra LinealFreddy RamirezAún no hay calificaciones
- Pd13-Equilibrio QuímicoDocumento11 páginasPd13-Equilibrio QuímicoSmith FuentesAún no hay calificaciones
- Informe 1 InstrumentaciónDocumento11 páginasInforme 1 InstrumentaciónJoseph Rocha TintayaAún no hay calificaciones
- Primer Parcial Etn 406Documento2 páginasPrimer Parcial Etn 406Elmer Rodrigo Loayza BlancoAún no hay calificaciones
- Práctica #0Documento11 páginasPráctica #0Yessy Arcani LauraAún no hay calificaciones
- Calculo Ii Practica Primer Parcial PDFDocumento6 páginasCalculo Ii Practica Primer Parcial PDFLuis CondoriAún no hay calificaciones
- Parcial 1 CanoDocumento53 páginasParcial 1 CanoAaron GuzmanAún no hay calificaciones
- Lab Fisica GeneralDocumento8 páginasLab Fisica GeneralHans FloresAún no hay calificaciones
- Informe Oscilaciones ElectromagneticasDocumento12 páginasInforme Oscilaciones ElectromagneticastayconsAún no hay calificaciones
- Derivadas ParcialesDocumento11 páginasDerivadas ParcialesLimbert Quispe VelaAún no hay calificaciones
- Calculo I (07-03-2022)Documento10 páginasCalculo I (07-03-2022)beny ryverAún no hay calificaciones
- Vec r3 para Tarea Cal IIDocumento48 páginasVec r3 para Tarea Cal IImikeAún no hay calificaciones
- Guia 1 (QMC200) - 1Documento8 páginasGuia 1 (QMC200) - 1gabriela ayma ortizAún no hay calificaciones
- PH y Curvas de NeutralizacionDocumento23 páginasPH y Curvas de NeutralizaciondraggusAún no hay calificaciones
- ET Clase2Documento16 páginasET Clase2Freddy RamirezAún no hay calificaciones
- Primer Informe de Laboratorio Mat - 1207Documento8 páginasPrimer Informe de Laboratorio Mat - 1207Katia Cendi Céspedes MarcaAún no hay calificaciones
- 1 Parcial QMC-100 - 021138Documento21 páginas1 Parcial QMC-100 - 021138Alvarez M. Fabricio MiguelAún no hay calificaciones
- Informe Fisica II - UNAC - FIEEDocumento8 páginasInforme Fisica II - UNAC - FIEEBrandon Payano De La CruzAún no hay calificaciones
- Inf - Lab3 - Quispe Calle Jhilmer NachoDocumento11 páginasInf - Lab3 - Quispe Calle Jhilmer NachoJhilmer QuispeAún no hay calificaciones
- TermodinámicaDocumento2 páginasTermodinámicaGary Ridmar Alcaraz CamposAún no hay calificaciones
- Ejercicios Tercer Parcail Mat 103 PDFDocumento7 páginasEjercicios Tercer Parcail Mat 103 PDFJhoselin Gomez NinaAún no hay calificaciones
- Informe Física Básica III (Corriente Alterna)Documento8 páginasInforme Física Básica III (Corriente Alterna)Luis Yucra Pizarro LuisAún no hay calificaciones
- Soluciones y Masa EquivalenteDocumento6 páginasSoluciones y Masa EquivalenteIsra Santy RodriguezAún no hay calificaciones
- Examen Dispensación 2019Documento9 páginasExamen Dispensación 2019freddyAún no hay calificaciones
- Formulario 3er Parcial MAT207 Por Aux JReynaldoDocumento2 páginasFormulario 3er Parcial MAT207 Por Aux JReynaldoNestor ChambiAún no hay calificaciones
- Fisica 200 Solucionario Salinas PDFDocumento82 páginasFisica 200 Solucionario Salinas PDFFERDEZ TAún no hay calificaciones
- Cuestionario Nro 7 Lab de QuimicaDocumento6 páginasCuestionario Nro 7 Lab de QuimicaJaqueline CarrilloAún no hay calificaciones
- 6 Ejercicios Sistemas Trifasicos PDFDocumento14 páginas6 Ejercicios Sistemas Trifasicos PDFmaria100% (1)
- Laboratorio Fis 200 CAPACITANCIADocumento3 páginasLaboratorio Fis 200 CAPACITANCIApol0% (2)
- Formulario Primer Parcial (Mat-207)Documento4 páginasFormulario Primer Parcial (Mat-207)Javier MillerAún no hay calificaciones
- FORMULARIODocumento4 páginasFORMULARIOLorena Stefany ContrerasAún no hay calificaciones
- Ecuaciones Diferenciales Segundo Orden y LaplaceDocumento11 páginasEcuaciones Diferenciales Segundo Orden y LaplaceLaura NaviaAún no hay calificaciones
- Solucionar Ecuaciones DiferencialesDocumento15 páginasSolucionar Ecuaciones DiferencialesEdu EduapastAún no hay calificaciones
- 1 Métodos de Edo de Primer Orden BidderDocumento7 páginas1 Métodos de Edo de Primer Orden BidderdavidalvarezsegAún no hay calificaciones
- Psa Mat PreuDocumento127 páginasPsa Mat PreuCristianAún no hay calificaciones
- 1er ParcialDocumento6 páginas1er ParcialCristianAún no hay calificaciones
- Practica I-2020Documento6 páginasPractica I-2020CristianAún no hay calificaciones
- Formulario 1er Parcial PDFDocumento10 páginasFormulario 1er Parcial PDFCristian0% (1)
- Apuntes Termodinámica MEC315 PDFDocumento109 páginasApuntes Termodinámica MEC315 PDFCristianAún no hay calificaciones
- Química 5to Año PDFDocumento161 páginasQuímica 5to Año PDFcrisar1083% (18)
- Alumnos Con Dificultades de AprendizajeDocumento25 páginasAlumnos Con Dificultades de AprendizajemlmleAún no hay calificaciones
- Trabajo de Grado Heyder Favian SarmientoDocumento29 páginasTrabajo de Grado Heyder Favian Sarmientomiguel_rp18Aún no hay calificaciones
- La Ley PenalDocumento11 páginasLa Ley PenalSamuel RodasAún no hay calificaciones
- Diseno de Muro ContrafuerteDocumento13 páginasDiseno de Muro ContrafuerteAMIRAAún no hay calificaciones
- Declaración de París Sobre El DesarrolloDocumento16 páginasDeclaración de París Sobre El DesarrolloMarcia Valenzuela PedrerosAún no hay calificaciones
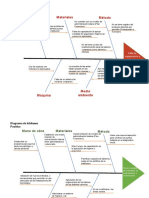
- Diagramas IsickawuaDocumento2 páginasDiagramas IsickawuaGianni VázquezAún no hay calificaciones
- Trabajo Provincia de HuancayoDocumento37 páginasTrabajo Provincia de HuancayoMax KW MezzaAún no hay calificaciones
- Taller de Estructuras de Control en La Solución de AlgoritmosDocumento4 páginasTaller de Estructuras de Control en La Solución de Algoritmosluis iruaAún no hay calificaciones
- Dewey CuestionarioDocumento7 páginasDewey CuestionarioSol Denisse Castro OrtizAún no hay calificaciones
- Tanques de AlmacenamientoDocumento23 páginasTanques de Almacenamientomarcelo quispe guerecaAún no hay calificaciones
- Apunte para Examen TeoricoDocumento126 páginasApunte para Examen TeoricoTomás SuárezAún no hay calificaciones
- Introducción. Teoría de La Mente, Desarrollo y Autismo. Recordando A Ángel RivièreDocumento12 páginasIntroducción. Teoría de La Mente, Desarrollo y Autismo. Recordando A Ángel RivièreEduardo Aguirre Dávila100% (2)
- OlgienCarranza Diana M17S1AI2Documento5 páginasOlgienCarranza Diana M17S1AI2luna pereAún no hay calificaciones
- Herramientas TICDocumento5 páginasHerramientas TICclaudiaAún no hay calificaciones
- UNIDAD 1 - 1.1.2 Principios Del Analisis EconomicoDocumento3 páginasUNIDAD 1 - 1.1.2 Principios Del Analisis Economicoandrea montserrat maranon medinaAún no hay calificaciones
- Agricultura InsostenibleDocumento2 páginasAgricultura InsostenibleAlondra CVAún no hay calificaciones
- Buchanan, Veronica (2013) - Znombrar-Paraz o Lo Que Prefiere La EpocaDocumento5 páginasBuchanan, Veronica (2013) - Znombrar-Paraz o Lo Que Prefiere La EpocaRominaAvalosAún no hay calificaciones
- Coloración de GramDocumento2 páginasColoración de GramdiegoAún no hay calificaciones
- Problemas Conservacion Energia (1168)Documento4 páginasProblemas Conservacion Energia (1168)Joas RedAún no hay calificaciones
- Elementos de Materiales Arquitectonicos NormalizadosDocumento11 páginasElementos de Materiales Arquitectonicos NormalizadosyaksanAún no hay calificaciones
- Rosales Yañez Oscar DanielDocumento2 páginasRosales Yañez Oscar Danielmolly260226Aún no hay calificaciones
- Informe Final NeyverDocumento19 páginasInforme Final NeyverNeyver Vela PortocarreroAún no hay calificaciones
- Sistamas de RadarDocumento21 páginasSistamas de Radarjuan carlosAún no hay calificaciones
- Hernandez KatherineDocumento59 páginasHernandez KatherineLeydy Jhoana HERNANDEZ VELASQUEZAún no hay calificaciones
- Actividad de Aprendizaje 2Documento8 páginasActividad de Aprendizaje 2Mauricio ArenasAún no hay calificaciones
- Resumen Capitulo 7 BerkDocumento2 páginasResumen Capitulo 7 BerkCuruwa CuruwaAún no hay calificaciones
- Protección Radiológica 1Documento48 páginasProtección Radiológica 1Konstanza Jara NuñezAún no hay calificaciones
- Teoria Comprension Lectora (Pilar Nunez Delgado)Documento71 páginasTeoria Comprension Lectora (Pilar Nunez Delgado)jucapalo100% (25)
- WEG Rele Programable Clic 02 Controlador Programable TP 03 y Interfaz Hombre Maquina 50029483 Catalogo Espanol PDFDocumento16 páginasWEG Rele Programable Clic 02 Controlador Programable TP 03 y Interfaz Hombre Maquina 50029483 Catalogo Espanol PDFNicolás Alday LeivaAún no hay calificaciones