También podría gustarte
- Cuestiones de ConduccionDocumento11 páginasCuestiones de ConduccionJoyce Belen MoralesAún no hay calificaciones
- kA dT dx kgrad T h (T T εσ TDocumento7 páginaskA dT dx kgrad T h (T T εσ TJoyce Belen MoralesAún no hay calificaciones
- Examen 1 2016Documento12 páginasExamen 1 2016Joyce Belen Morales100% (1)
- Ejemplos y EjerciciosDocumento4 páginasEjemplos y EjerciciosAnonymous XQ1seKlAún no hay calificaciones
- Ejemplos y EjerciciosDocumento4 páginasEjemplos y EjerciciosAnonymous XQ1seKlAún no hay calificaciones
- Encuesta Mensual de JunioDocumento88 páginasEncuesta Mensual de JunioJoyce Belen MoralesAún no hay calificaciones
- Ejercicios SimulacionDocumento11 páginasEjercicios SimulacionJoyce Belen MoralesAún no hay calificaciones
- Tarea de Accionamiento EléctricoDocumento5 páginasTarea de Accionamiento EléctricoJoyce Belen MoralesAún no hay calificaciones
- 1Documento7 páginas1Joyce Belen Morales0% (1)
- gs3 21 2 Release Notes SpanishDocumento6 páginasgs3 21 2 Release Notes SpanishMarcos ParedesAún no hay calificaciones
- Brochure IPR Partes y Repuestos 2019Documento8 páginasBrochure IPR Partes y Repuestos 2019Eymard Crisanto Ortiz EstupiñanAún no hay calificaciones
- Check List Herramientas GeneralDocumento1 páginaCheck List Herramientas GeneralManuel Orellana VargasAún no hay calificaciones
- MANUALDocumento7 páginasMANUALDiego Uchiha XdAún no hay calificaciones
- Samsung AIRE ACONDICIONADO SPLIT SAMSUNGDocumento4 páginasSamsung AIRE ACONDICIONADO SPLIT SAMSUNGproyectoariesAún no hay calificaciones
- 05-Instalación KNXDocumento24 páginas05-Instalación KNXfelipe cortesAún no hay calificaciones
- Practica 1Documento16 páginasPractica 1Ricardo Fuentes GómezAún no hay calificaciones
- Entradas DigitalesDocumento5 páginasEntradas DigitalesJavi CasasolariegaAún no hay calificaciones
- Practica8 Equipo4Documento32 páginasPractica8 Equipo4López Gutiérrez BereniceAún no hay calificaciones
- Configuraciones de ChopperDocumento4 páginasConfiguraciones de ChopperGaby EscAún no hay calificaciones
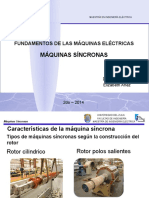
- Máquinas SíncronasDocumento33 páginasMáquinas SíncronasWilsonAún no hay calificaciones
- Catalogo Ldnio Precio2Documento18 páginasCatalogo Ldnio Precio2jhonna molinaAún no hay calificaciones
- Laboatorio Nro3Documento18 páginasLaboatorio Nro3NASYT FFAún no hay calificaciones
- DIAGRAMADocumento1 páginaDIAGRAMACar FerAún no hay calificaciones
- 2020 Unidad 5 Programa de Actividades y Lecturas Mediciones EléctricasDocumento7 páginas2020 Unidad 5 Programa de Actividades y Lecturas Mediciones EléctricasChristopher LanzaAún no hay calificaciones
- LG NeveraDocumento2 páginasLG NeverasilictronicAún no hay calificaciones
- Control Con Dispositivos ElectromecanicosDocumento41 páginasControl Con Dispositivos ElectromecanicosDavid Addy Sánchez PerezAún no hay calificaciones
- Ejercicio Sistemas ElectricosDocumento2 páginasEjercicio Sistemas ElectricosRous MakerAún no hay calificaciones
- Rele Magnetico y de Estado SolidoDocumento41 páginasRele Magnetico y de Estado SolidoLENIN GAMARRAAún no hay calificaciones
- Cómo Construir Un Radio Transmisor de AM o FM CaseroDocumento4 páginasCómo Construir Un Radio Transmisor de AM o FM Caserofreddy0123456789100% (1)
- Ciencias Basicas Lab 2Documento15 páginasCiencias Basicas Lab 2Fabrizio AmayaAún no hay calificaciones
- Certificado Sungrow SG33 - 40 - 50CX UNE 217001. ESDocumento2 páginasCertificado Sungrow SG33 - 40 - 50CX UNE 217001. ESGerson SouzaAún no hay calificaciones
- Cesion de Calidad de Heredero - Patricio Arnaldo FonsecaDocumento7 páginasCesion de Calidad de Heredero - Patricio Arnaldo FonsecaMarcoAún no hay calificaciones
- Una Propuesta de Ahorro y Uso Eficiente de La Energía EléctricaDocumento4 páginasUna Propuesta de Ahorro y Uso Eficiente de La Energía EléctricaSa�l L�pez GalavizAún no hay calificaciones
- (AY) Reguladores - LinealesDocumento5 páginas(AY) Reguladores - LinealesSección TresAún no hay calificaciones
- Seleccion de ConductoresDocumento4 páginasSeleccion de ConductoresCipriel LoraAún no hay calificaciones
- Electronica Digital Lab 1Documento16 páginasElectronica Digital Lab 1anderson julian gomez velascoAún no hay calificaciones
- Informe de Mantenimiento Trafo Corriente 13,2KVDocumento2 páginasInforme de Mantenimiento Trafo Corriente 13,2KVOswal RualesAún no hay calificaciones
- Technical Manual & Parts Lists: ModelDocumento114 páginasTechnical Manual & Parts Lists: ModelMantenimientoAún no hay calificaciones
- Fis 116Documento3 páginasFis 116Lisbeth Cano QuispeAún no hay calificaciones