También podría gustarte
- Kelb U3 A2 LabpDocumento3 páginasKelb U3 A2 LabpGerardo NoriegaAún no hay calificaciones
- Kelb U3 A2 OsmhDocumento3 páginasKelb U3 A2 OsmhGerardo NoriegaAún no hay calificaciones
- Kelb U3 A3 FRSPDocumento3 páginasKelb U3 A3 FRSPGerardo NoriegaAún no hay calificaciones
- Kcod U3 A1 RaohDocumento12 páginasKcod U3 A1 RaohGerardo Noriega100% (1)
- Kcod U2 A1 KaiaDocumento3 páginasKcod U2 A1 KaiaGerardo NoriegaAún no hay calificaciones
- Com de DatosDocumento8 páginasCom de DatosGerardo NoriegaAún no hay calificaciones
- Kcod U2 A1 Masj PDFDocumento7 páginasKcod U2 A1 Masj PDFGerardo NoriegaAún no hay calificaciones
- Kcod U2 A1 RecgDocumento5 páginasKcod U2 A1 RecgGerardo NoriegaAún no hay calificaciones
- Kcod U2 A2 SesrDocumento18 páginasKcod U2 A2 SesrGerardo NoriegaAún no hay calificaciones
- Kcod U2 A1 MasjDocumento7 páginasKcod U2 A1 MasjGerardo NoriegaAún no hay calificaciones
- Kcod U2 A1 MarcDocumento4 páginasKcod U2 A1 MarcGerardo NoriegaAún no hay calificaciones
- Kmdi U3 A2 NegbDocumento6 páginasKmdi U3 A2 NegbGerardo NoriegaAún no hay calificaciones
- Kedf U3 A1 V1 JofoDocumento4 páginasKedf U3 A1 V1 JofoGerardo NoriegaAún no hay calificaciones
- El PárrafoDocumento3 páginasEl PárrafoErick AraúzAún no hay calificaciones
- La Escuela Como Institución SocializadoraDocumento3 páginasLa Escuela Como Institución SocializadoraDrosher FunnyAún no hay calificaciones
- Delitos de Ejercicio Ilegal de La ProfesiónDocumento3 páginasDelitos de Ejercicio Ilegal de La ProfesiónMary Cruz SuyoAún no hay calificaciones
- TopografiaDocumento4 páginasTopografiaFrancisco Javier Arévalo VarasAún no hay calificaciones
- Que Hago Si Mi Media Naranja Es ToronjaDocumento11 páginasQue Hago Si Mi Media Naranja Es ToronjaClaudia Espinoza89% (63)
- HomosexualidadDocumento6 páginasHomosexualidadDavid M. RamosAún no hay calificaciones
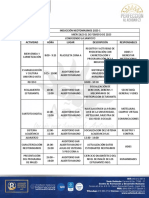
- Inducción Neotomasina 2023-1Documento3 páginasInducción Neotomasina 2023-1Teban :vAún no hay calificaciones
- Actividad 7 Elaboración Del Marco Lógico de Un ProyectoDocumento5 páginasActividad 7 Elaboración Del Marco Lógico de Un ProyectoYandiAún no hay calificaciones
- Producto Académico 3Documento2 páginasProducto Académico 3Piero CastroAún no hay calificaciones
- Cinemática de Máquinas-HerramientaDocumento26 páginasCinemática de Máquinas-HerramientaJose Manuel Inoa Vega33% (3)
- Programacion de Octubre 2022 Filmoteca Espa OlaDocumento62 páginasProgramacion de Octubre 2022 Filmoteca Espa OlajorgecrapAún no hay calificaciones
- 6ºformaciones Diencefálicas ModificadoDocumento31 páginas6ºformaciones Diencefálicas ModificadoRocio Jaramillo AlvarezAún no hay calificaciones
- Uso Problemático de Las Redes SocialesDocumento15 páginasUso Problemático de Las Redes Socialesrocio pimientoAún no hay calificaciones
- La BibliaDocumento6 páginasLa BibliaCenterSvAún no hay calificaciones
- Anexo 2 - Diagnostico Solidario HbadillodDocumento7 páginasAnexo 2 - Diagnostico Solidario Hbadillodmaria badilloAún no hay calificaciones
- 6 - Geometría - Undecimo Tradicional - Prueba CPSC II Periodo 2015Documento3 páginas6 - Geometría - Undecimo Tradicional - Prueba CPSC II Periodo 2015Diego GarcíaAún no hay calificaciones
- Ejercicios Vector Binormal11Documento4 páginasEjercicios Vector Binormal11Francis SergeyevichAún no hay calificaciones
- Alianzas Estratégicas para La Participación Juvenil en La ComunidadDocumento21 páginasAlianzas Estratégicas para La Participación Juvenil en La ComunidadSergio EstigarribiaAún no hay calificaciones
- Como Encontrar El Camino A La Vida EternaDocumento2 páginasComo Encontrar El Camino A La Vida EternaAbel Salinas GonzálezAún no hay calificaciones
- Saludindividual y ColectivaDocumento5 páginasSaludindividual y ColectivaChary OrtizAún no hay calificaciones
- Gude Antonio (Ed) - Aperturas Catalana 250 Partidas, 1990-OCR, 118p PDFDocumento118 páginasGude Antonio (Ed) - Aperturas Catalana 250 Partidas, 1990-OCR, 118p PDFEnnis Alejandro Marin RojasAún no hay calificaciones
- Hoja de Trabajo # 5Documento2 páginasHoja de Trabajo # 5Kenedy Tum Damian100% (1)
- Curvas Idf PDFDocumento9 páginasCurvas Idf PDFjuanpksaenz11Aún no hay calificaciones
- Ficha TécnicaDocumento2 páginasFicha TécnicaabirlAún no hay calificaciones
- Como Corregir La IrritabilidadDocumento3 páginasComo Corregir La Irritabilidadpiita198050% (2)
- Cuestionario Descartes PDFDocumento3 páginasCuestionario Descartes PDFangelAún no hay calificaciones
- Corrientes LibertadorasDocumento13 páginasCorrientes LibertadorasSiulblack 00Aún no hay calificaciones
- Tipos de Investigacion, Presupuesto y CronogramaDocumento19 páginasTipos de Investigacion, Presupuesto y CronogramaEmilio PalmaAún no hay calificaciones
- Analisis Fabula de Las Abejas Letra (I)Documento2 páginasAnalisis Fabula de Las Abejas Letra (I)YENNY DANIELA RECAMAN RODRIGUEZAún no hay calificaciones
- Calculo Del Regulador de Voltaje Con Diodo ZenerDocumento12 páginasCalculo Del Regulador de Voltaje Con Diodo ZenerLuis Mendoza0% (1)