También podría gustarte
- Práctica 2.2Documento14 páginasPráctica 2.2Fabián José Trejo Mayorquin100% (2)
- PLAN DE TRANSICIÓN - INGENIERÍA INDUSTRIAL-signed-signed PDFDocumento15 páginasPLAN DE TRANSICIÓN - INGENIERÍA INDUSTRIAL-signed-signed PDFCésar SarangoAún no hay calificaciones
- Contabilidad General PDFDocumento135 páginasContabilidad General PDFCésar SarangoAún no hay calificaciones
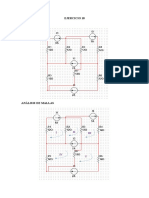
- Ejercicio 18 MallasDocumento3 páginasEjercicio 18 MallasCésar SarangoAún no hay calificaciones
- Unidad 1Documento136 páginasUnidad 1César SarangoAún no hay calificaciones
- Cuestionario ESTADISTICADocumento7 páginasCuestionario ESTADISTICACésar SarangoAún no hay calificaciones
- Test Redes SocialesDocumento57 páginasTest Redes SocialesCristina Lopez DominguezAún no hay calificaciones
- Regula 7004 M100Documento19 páginasRegula 7004 M100Sandy CarbajalAún no hay calificaciones
- Cifras TerminalesDocumento2 páginasCifras TerminalesEspinoza Erick100% (1)
- 0003238Documento149 páginas0003238DANIEL RODRIGUEZAún no hay calificaciones
- 6.5.1.2 Lab - Building A Switch and Router Network PDFDocumento6 páginas6.5.1.2 Lab - Building A Switch and Router Network PDFValorando ValoresAún no hay calificaciones
- Rfe-1-Bru-Eip-Ido-001-Rev0 TS Ups PDFDocumento40 páginasRfe-1-Bru-Eip-Ido-001-Rev0 TS Ups PDFJlAguirreAún no hay calificaciones
- Inversión Fija Tangible e IntangibleDocumento2 páginasInversión Fija Tangible e Intangiblegeraldine50% (2)
- Tema 4 GestionDocumento3 páginasTema 4 GestionCristhopher JimenezAún no hay calificaciones
- Taller Puntos Por MilDocumento2 páginasTaller Puntos Por Milcarlos andres carrionAún no hay calificaciones
- 2020 I CUV Ex2 Tema 1 SolucionDocumento4 páginas2020 I CUV Ex2 Tema 1 SolucionJohan MoreiraAún no hay calificaciones
- Mapa Curricular AgrotecnologiaDocumento2 páginasMapa Curricular AgrotecnologiaJosué Durón MuñozAún no hay calificaciones
- Apuntes MemoriaDocumento60 páginasApuntes MemoriaBlanca Perez ParraAún no hay calificaciones
- Guía Del Examen de Admisión 2023 Ciclo AgostoDocumento28 páginasGuía Del Examen de Admisión 2023 Ciclo AgostoDanixa MéndezAún no hay calificaciones
- Acta de Nacimiento RECY960126MDFYSN05Documento1 páginaActa de Nacimiento RECY960126MDFYSN05ASCENCION DE LA LUZ ESTRADAAún no hay calificaciones
- Constancia Cita en LineaDocumento2 páginasConstancia Cita en LineaMayra Flores LunaAún no hay calificaciones
- FILTROS - Apuntes 13 de AbrilDocumento5 páginasFILTROS - Apuntes 13 de AbrilLeoAún no hay calificaciones
- Guia ABS 1DEPDocumento8 páginasGuia ABS 1DEPbrenda sanchezAún no hay calificaciones
- MPU 6000 Register Map1.en - EsDocumento46 páginasMPU 6000 Register Map1.en - EsJhon Stevens Rincon HernandezAún no hay calificaciones
- FORO Industria 4.0Documento1 páginaFORO Industria 4.0andresl970% (1)
- Curso C++Documento3 páginasCurso C++Ivan VergaraAún no hay calificaciones
- Practica Base de Datos Parcial IIIDocumento17 páginasPractica Base de Datos Parcial IIIManuel AngelesAún no hay calificaciones
- Cuestionario 1Documento3 páginasCuestionario 1HayamiAún no hay calificaciones
- Guía de Aprendizaje 07 PDFDocumento10 páginasGuía de Aprendizaje 07 PDFAnthony Fernandez HerreraAún no hay calificaciones
- Inteligencia Artificial - Fabio Augusto Gonzalez-Ilovepdf-CompressedDocumento51 páginasInteligencia Artificial - Fabio Augusto Gonzalez-Ilovepdf-CompressedHolman SneyderAún no hay calificaciones
- Cotización de Camaras para Bodega de CamionesDocumento2 páginasCotización de Camaras para Bodega de CamionesivonnutriologaAún no hay calificaciones
- Actividad 5 (Análisis y Diseño de Software)Documento4 páginasActividad 5 (Análisis y Diseño de Software)MIGUEL ARMANDO ARROYO NARVAEZAún no hay calificaciones
- P Investigacion de Operaciones U2 Actividad 3Documento4 páginasP Investigacion de Operaciones U2 Actividad 3JUAN ANDRES CANTOS RODRIGUEZAún no hay calificaciones
- Guia de Laboratorio Nro 07Documento5 páginasGuia de Laboratorio Nro 07Toni GarciaAún no hay calificaciones
- Factorizacion de Expresiones AlgebraicasDocumento8 páginasFactorizacion de Expresiones AlgebraicasOscar GonzalezAún no hay calificaciones